
永磁同步电动机自控式变频调速系统研究
2016-02-26 02:00:22邢坤博陈存坚张晓凡
电子科技 2016年2期
关键词:建模
邢坤博,荣 军,陈存坚,廖 钊,张晓凡
(湖南理工学院 信息与通信工程学院,湖南 岳阳 414006)

永磁同步电动机自控式变频调速系统研究
邢坤博,荣军,陈存坚,廖钊,张晓凡
(湖南理工学院 信息与通信工程学院,湖南 岳阳414006)
摘要针对永磁同步电动机他控式变频调速系统需要借助外部装置测得电机转速信息,因此增加了设计难度,文中研究了一种永磁同步电动机自控式变频调速系统,该系统能在负载发生变化时,通过位置传感器及时反馈转速信息,从而改变供电电路的频率,调节转速而使系统达到稳定。文中阐述了永磁同步电动机自控式变频调速系统在Matlab/Simulink中的建模与仿真过程,并对仿真结果进行了分析。仿真结果表明,该波永磁同步电动机的自控式变频调速系统具有优异动态和静态性能,是一种较为理想的调速方式。
关键词永磁同步电动机;自控式变频调速;转速调节器;电流调节器;建模
永磁同步电动机由于转矩脉动小以及绝对硬的机械特性,常用于高精度的调速系统中[1-2]。目前永磁同步电动机主要采用变频进行调速控制,而变频调速又分为他控式变频调速和自控式变频调速两种,其区别在于前者需利用独立的变频装置,变频装置跟电机之间没有任何联系;而后者除了利用静止的变频装置给同步电动机提供变频变压电源以外,自控式变频调速装置中的输出频率不是独立调节的,而是由转子位置检测器控制的。由此可见,当负载发生变化的情况下,自控式变频调速系统能够将电机转速反馈给变频装置,从而更加迅速地根据实际情况调整电机工作情况。与他控式变频调速技术相比,自控式变频调速技术更精确和迅速,因此其应用范围也更广[3-4]。本文研究了自控式变频调速技术在永磁同步电动机中的应用,通过实验证明了设计的正确性。
1永磁同步电动机的数学模型
1.1在两相静止坐标系下的数学模型
通过对永磁同步电机的工作原理的学习可知,当电机定子电流的频率固定不变时,电机的转子转速与其保持严格同步,可表示为[5]
(1)
式中,n为电机的同步转速;p为电机的极对数;f为电机的定子电流频率[5]。
用于永磁同步电机属于非线性和强耦合性的复杂系统,为简化分析过程,在推导中作如下假设[6-7]:(1)忽略电机的饱和效应、磁滞和涡流损耗;(2)转子的结构为对称结构;(3)电机定子三相绕组的结构完全相同,在空间上分别相差120°电角度,其所产生的磁动势在气隙中按正弦规律分布;(4)电机的气隙分布均匀。此时电动机转子磁链在各项绕组的交链分别是
(2)
其中,φf为转子磁链的幅值,且一般是常数;θe为空间电角度;φA、φB、φC分别为转子磁链在A、B、C相绕组中产生的交链,且是θe的函数。
永磁同步电动机经过αβ坐标系变换后,得到的两相绕组的两个分电流所产生的合成磁动势和原来三相绕组3个分电流所产生的合成磁动势的大小相等。为简便计算分析过程,本文规定两相绕组的合成磁动势和三相绕组的合成磁动势转向相同,且α轴与a轴完全重合。永磁同步电机经αβ坐标变换后,可得出经坐标变换后的电压方程以及电磁转矩方程。其中电压方程为
(3)
其中,uα和uβ分别为α-β坐标系中定子的电压;iα和iβ分别为α-β坐标系中的定子电流。
电磁转矩方程为
(4)
式中,Ψα和Ψβ分别为αβ坐标系中的定子磁链;p为磁极数;Te为电磁转矩。
1.2在两相旋转坐标系下的数学模型
在磁场等效的原则下,将转子的旋转磁场作为参考系,以与转子磁链重合的方向作为d轴,以与转子正交的方向为q轴,并且q轴超前d轴90°。现将αβ坐标系中永磁同步电机的状态方程组转换到dq坐标系中,便可得到dq坐标中的电压、磁链和电磁转矩方程[8]。其中电压方程为
(5)
式中,ud和uq分别为dq坐标系中的定子电压;id和iq分别为dq坐标系中的定子电流;Ψd和Ψq分别为dq坐标系中的定子磁链。
磁链方程为
(6)
Ld和Lq分别为dq坐标系中的定子电感,Ψf为dq坐标系中的转子磁链。
电磁转矩方程为
(7)
2自控式变频调速的工作原理

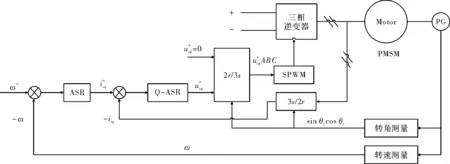
图1 永磁同步电动机变频调速系统原理框图
3变频调速系统的建模与仿真
3.1变频调速系统的仿真模型
永磁同步电动机变频调速系统的仿真模型如图2所示,系统主电路由直流电源、逆变器和永磁同步电动机组成,其中永磁同步电动机的励磁类型选择正弦波Sinousoidal。图2中的转速调节器ASR仿真模块和电流调节器q-ACR仿真模块分别如图3和图4所示[10]。
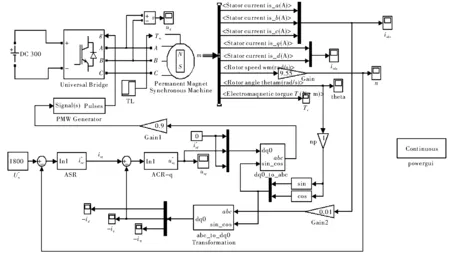
图2 梯形波永磁同步电机变频调速系统仿真模型

图3 转速调节器ASR的仿真模型

图4 电流调节器q-ACR的仿真模型
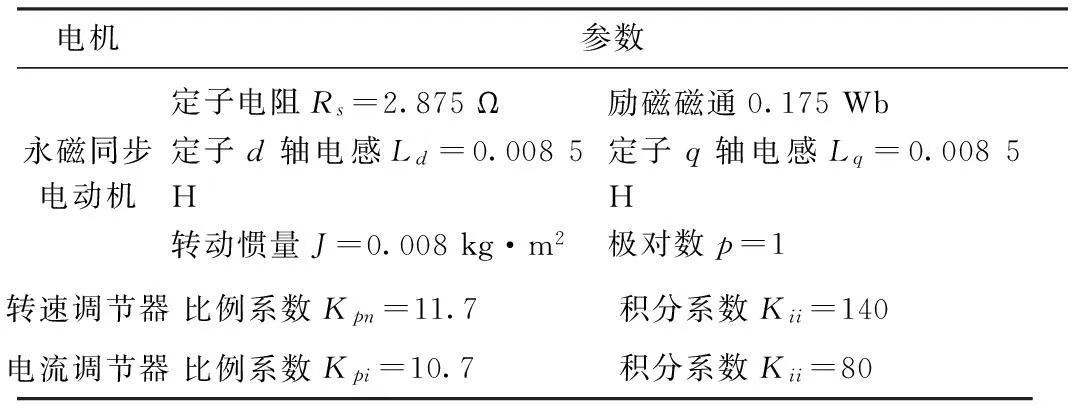
电机参数永磁同步电动机定子电阻Rs=2.875Ω励磁磁通0.175Wb定子d轴电感Ld=0.0085H定子q轴电感Lq=0.0085H转动惯量J=0.008kg·m2极对数p=1转速调节器比例系数Kpn=11.7积分系数Kii=140电流调节器比例系数Kpi=10.7积分系数Kii=80
3.2仿真结果及其分析
永磁同步电动机变频调速仿真结果如图5所示。其中图5(a)为给定1 800 r/min带载1.5 N·m起动时的转速响应仿真波形,从图5(a)可看出,电动机以空载起动,0.1 s时加载6 N·m的负载,从空载起动到带负载运行的整个运行过程中,只是在加载的瞬间转速波形有较小的波动,但很快恢复到平稳转速1 800 r/min,这说明电机变频调速系统的稳定性较好,同样电机系统的快速性能也非常好。在另外一方面,永磁同步电动机的转速始终保持1 800 r/min,说明同步电动机转速并不随负载的改变而发生改变,这也是命名为同步电机的原因。图5(b)为定子电流的转矩分量isq和励磁分量isd仿真波形,从图5(b)可看出,当负载为零时,定子电流转矩分量isq和励磁分量isd都等于零,当在0.1 s加载时转矩分量isq和励磁分量isd都增大,而且电流转矩分量isq明显大于励磁分量isd,原因在于电机在作为电动机过程过程中,电能转化为机械能,带动负载转动,从能量传输过程得出输入电能必定大于输出机械能。图5(c)为电动机转矩仿真波形,从图中可以看出,永磁同步电机在变频调速情况下转矩脉动有波动,原因在于励磁分量isd有波动,所以导致转矩有波动,这是变频调速的不利之处。图5(d)为定子三相电流仿真波形,从图5(d)可看出,永磁同步电机定子输入电流为标准的正弦波形,这与其输入三相交流电压完全一致。

图5 永磁同步电动机调速系统仿真波形
4结束语
本文研究了永磁同步电动机的变频调速技术,在其工作原理的基础上推断了其在两相静止坐标系和两
相旋转坐标系下的数学模型,介绍了其变频调速的工作原理,在Matlab/Simulink中对其进行了建模,并对仿真结果进行了详细分析,从中可得出永磁同步电动机变频调速具有优异的动态和静态特性,尤其是当负载发生变化时,电机系统稳定性较好,因此永磁同步电动机变频调速系统可广泛应用于转速固定不变的工作场合。
参考文献
[1]李红梅,陈涛.永磁同步电机参数辨识研究综述[J].电子测量与仪器学报,2015,29(5):638-645.
[2]丁硕,崔总泽,巫庆辉,等.基于SVPWM的永磁同步电机矢量控制仿真研究[J].国外电子测量技术,2014,33(6):81-85.
[3]张少华.永磁同步电机矢量控制策略研究与控制器实现[D].长沙:中南大学,2008.
[4]张琛.直流无刷电动机原理及应用[M].北京:机械工业出版社,1996.
[5]陈威,蒋宇,谢国秋.永磁同步电机矢量控制系统设计与仿真[J].电气开关,2009(5):11-17.
[6]张金利,张玉瑞,税冬东.永磁同步电机变频调速系统建模与仿真[J].电力电子术,2008,42(2):67-69.
[7]张好明,孙玉坤.新型永磁同步电机的变频调速系统[J].电机与控制应用,2008,35(2):41-44.
[8]覃海涛,沈安文,曹文超.基于Saber 的永磁同步电机直接转矩控制策略的比较仿真[J].计算技术与自动化,2009,28(1):63-66.
[9]刘学鹏,赵冬梅.永磁同步电机磁场定向变频调速技术的研究[J].机床与液压,2010,38(20):106-108.
[10]洪乃刚.电力电子和电力拖动控制系统的Matlab仿真[M].北京:机械工业出版社,2006.

Study of Self-controlled and Variable Frequency Speed Regulation Control Systemfor Permanent Magnet Synchronous Motor
XING Kunbo,RONG Jun,CHEN Cunjian,LIAO Zhao,ZHANG Xiaofan
(School of Information and Communication Engineering,Hunan Institute of
Science and Technology,Yueyang 414006,China)
AbstractThe control system of separately-controlled and variable frequency for the permanent magnet synchronous motor needs to be measured by the external device,thus increasing the difficulty of the design.A self-controlled and variable frequency speed regulation system for permanent magnet synchronous motor is studied.Self-controlled and variable frequency speed regulation systems can adjust the speed and allow the system to stabilize through position sensor to timely being feedback the speed information when the load is changing.The modeling and simulation of self-controlled and variable frequency speed regulation system for permanent magnet synchronous motor is described in detail based on Matlab/Simulink,and the simulation results are analyzed.The simulation results show that the self-controlled and variable frequency speed self-controlled and variable frequency speed regulation of control system for PMSM has good dynamic and static performance.
KeywordsPMSM;self-controlled and variable frequency speed regulation;speed regulator;current regulator;modeling
中图分类号TM351
文献标识码A
文章编号1007-7820(2016)02-041-04
doi:10.16180/j.cnki.issn1007-7820.2016.02.011
通讯作者:荣军(1978—),男,硕士,讲师。研究方向:直流电机控制技术。
基金项目:湖南省教育厅一般基金资助项目(15C0620;15C0622)
收稿日期:2015- 07- 15
猜你喜欢
舰船科学技术(2022年22期)2022-12-13 03:37:40
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
中学生数理化·高一版(2018年10期)2018-11-08 11:06:56
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
光学精密工程(2016年4期)2016-11-07 09:05:32
通信电源技术(2016年5期)2016-03-22 01:09:44
安全(2015年8期)2016-01-19 06:19:41
中国民航大学学报(2015年3期)2015-03-01 01:57:17
振动、测试与诊断(2014年4期)2014-03-01 01:14:09
