
基于纹理特征的混合高斯背景建模算法研究
2016-02-24 05:06李玉恵游旭晨
计算机技术与发展 2016年5期
冯 璞,李玉恵,李 勃,游旭晨
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
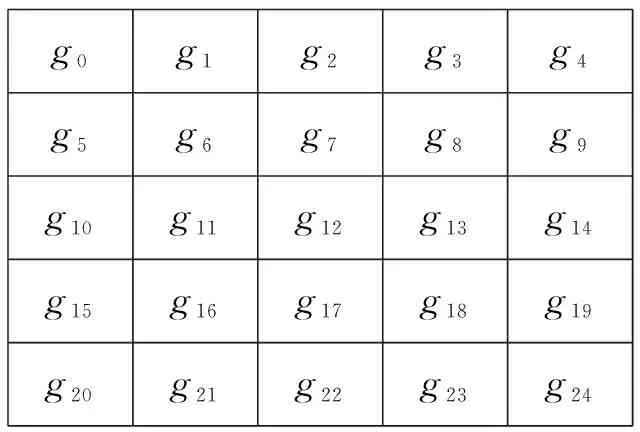
图2 像素局部5*5图像块
基于纹理特征的混合高斯背景建模算法研究
冯 璞,李玉恵,李 勃,游旭晨
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
在智能交通系统中,运动目标的检测是一个基本而又关键的问题。而传统高斯混合模型能较好地检测出运动目标,但由于其没有考虑像素的局部特征,使得运动目标区域的错误检测率有所增加。为了更好地在高速交通视频中检测出完整且准确的运动目标前景区域,文中在子空间的思想基础上,提出一种基于像素局部纹理特征的高斯混合模型改进算法,即以像素周围5*5图像块的均值、标准差、最大值、最小值和当前像素值5个特征作为局部纹理特征,建立高斯混合背景模型,进行运动目标检测。经过大量实验,结果表明该算法能更准确、完整地检测出运动目标并具有很好的环境适应性,特别是在运动目标区域与相应的背景区域颜色较为相似时,运动目标检测效果改善较为明显。
运动目标检测;混合高斯模型;局部纹理特征;背景模型
0 引 言
运动目标检测即从视频序列图像中获取运动目标区域,目前常用的运动目标检测方法有:光流法、帧差法、基于统计模型法、背景差法。光流法[1]的检测精度很高,特别是在背景较为复杂时,检测效果较好,但其计算复杂度太高,难以做到实时检测。帧差法[2-3]操作简单、实时性强,并对动态的环境适应性强,但其提取的前景不完整,内部容易出现空洞。基于统计模型法[4-6]抗干扰能力较强,但算法难以采用统一的模型描述目标的运动特征,且计算复杂。背景差法通过将当前图像和背景图像进行差分来检测运动目标。由于高速中的背景是不断变化的,因此如何获取到实时有效的背景是背景差法的关键所在,现在常用的背景获取方法是混合高斯模型法。
高斯混合背景模型算法最早由文献[7]提出。该算法采用多个高斯模型分布的加权来表示背景图像,能够很好地适应复杂环境,在运动目标的检测与提取方面有较为明显的优势;文献[8]提出运用K-均值聚类算法对高斯混合模型进行初始化,很大程度上提高了模型的收敛速度;文献[9]提出了一种融合相邻帧差法和背景减法的高斯混合模型算法,该改进算法解决了背景模型对光线变化敏感以及容易产生虚影等问题;文献[10]提出在建模过程中加入图像的空间信息,在提高了模型的自适应性的同时也提高了该算法的抗干扰能力。
然而,以上方法的提出并没有很好地解决混合高斯背景模型中出现的运动目标检测的准确性和完整性低的问题。针对这一问题,文中在子空间的思想基础上[11],提出一种基于像素纹理特征的高斯混合背景模型改进算法。
1 高斯混合模型
基于混合高斯背景模型的运动目标检测算法的核心内容主要包括两部分:一是高斯混合模型的建立与初始化过程;二是高斯混合模型的实时更新策略。
1.1 高斯混合背景建模

图1 高斯概率分布示意图

(1)
(2)

(3)

采用上述模型对图像序列中的背景区域进行描述之后,背景区域的每个像素就转化为K个高斯模型,高斯模型的权重为ωi。将K个高斯模型按照ωi/σi进行降序排列,取前B个高斯分布作为背景像素的最佳描述:
(4)
式中,T为B个高斯分布的权重阈值。
1.2 高斯混合背景的更新
实际应用中视频序列中的背景不是一成不变的,为保证背景的准确性,需要带背景进行实时更新[13-14]。在以上背景建模基础上,当有新的帧图像时,获取图像的各个像素分别与相对应的K个高斯模型依次进行匹配,匹配条件为:
(5)
式中,c是经验常数,一般取2.0~2.5较合适。
如果有匹配的高斯模型,对匹配成功的高斯模型中的参数进行更新,方法如下:
(6)

(7)

(8)
其中,θ为模型学习速率,且0≤θ≤1,θ值决定了背景更新的速度。
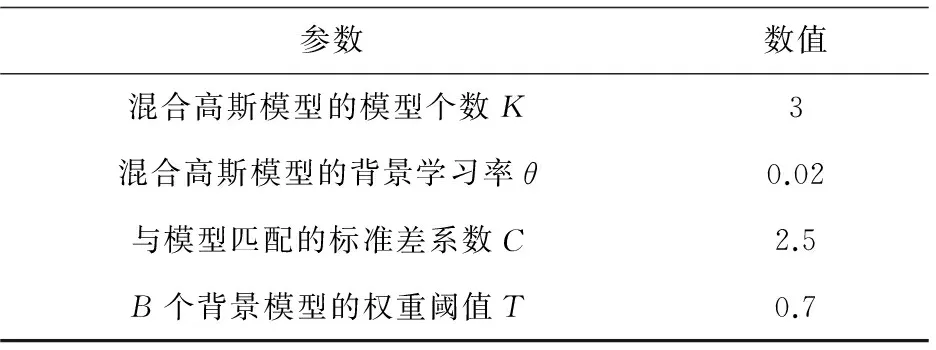
如果没有匹配的高斯模型,需要初始化一个新的高斯模型,新高斯模型以当前像数的灰度值作为模型的均值参数,并采用一个较大值作为方差参数,权重设置为一个较小的值。当k=K时,采用该高斯分布代替优先级ωi/σi最低的高斯模型;当k 由于传统的高斯混合模型在进行背景建模时,一般采用的是单像素方法,即以像素的灰度差异作为分类依据。这种方法在前景目标与背景像素灰度值差异有一定差距时效果较好,但当前景与背景的像素灰度值差异较小时,易将部分前景误判为背景,致使提取的前景不完整。主要是易将白色前景车辆的部分误以为是车道线、将深色前景车辆的部分误以为是道路背景,而且提取的前景车辆存在很多空洞。 虽然前景与背景的像素灰度值可能比较相似,但一般道路背景的纹理比较单一,前景车辆的纹理要比背景复杂得多。因此,基于以上问题,在子空间的思想基础上[11],提出以像素的局部纹理特征作为建模和分割依据。纹理是反映在一定的区域内像素值的组合,即其在空间分布上满足一定的规律。 要运用纹理特征对图像进行建模和分割,就必须考虑像素及其周围像素关系。文中选取像素周围5*5范围的图像块来进行计算。以像素块的均值、标准差、最大值、最小值、当前值5个特征表示像数的局部纹理特征。 如图2所示,g12表示当前像素值,g0~g24为以当前像素为中心5*5图像块的像素值。 g0g1g2g3g4g5g6g7g8g9g10g11g12g13g14g15g16g17g18g19g20g21g22g23g24 图2 像素局部5*5图像块 纹理算子如下: (9) 其中,gμ,gσ,gmax,gmin,gc分别表示图像块的均值、标准差、最大值、最小值、当前值。 2.1 改进高斯混合模型的参数初始化 改进后的高斯模型,以图像的纹理特征为建模单位,每个像素的高斯模型个数为K个,每个模型包括11个参数,分别为μμ,μσ,μmax,μmin,μc,σμ,σσ,σmax,σmin,σc,ω。 用视频的第一帧图像来初始化各像素的第一个高斯模型,运用式(9)计算各个像素的纹理特征值,赋值给模型的均值,标准差取较大的值为50,权重为1.0。公式如下: (10) 2.2 改进高斯混合模型参数的更新 当t时刻,有新的帧图像时,用式(9)计算图像帧中各个像素的纹理特征值并与相对应的K个高斯模型依次进行匹配,改进后的高斯混合模型的匹配条件为: (11) 如果匹配成功,对匹配的第i个高斯模型的参数进行更新,方法如下: (12) (13) 式中,θ为学习速率,且0≤θ≤1,θ值决定了背景更新的速度。 (14) 式(14)为各高斯模型的优先级参数。 结合推导的公式,具体的算法流程如下: (1)为图像中的每一个像素分配K个高斯模型,但有效高斯模型的个数为0。 (2)读取视频的第一帧图像,运用式(9)、(10)对图像中的各个像素的第一个高斯模型进行初始化。 (3)在t时刻,读取下一帧,运用式(11)与对应的模型进行顺序匹配,查找第一个匹配的高斯模型k,如果匹配成功执行(4),如匹配失败执行(5)。 (4)使用式(12)和式(13)对匹配的第i个高斯模型的参数进行更新。 (5)当k (6)对图像中各个像素的K个高斯模型进行降序排列,依照式(11)。 (7)取前B个高斯分布作为背景像素的最佳描述,使用式(4)。如k (8)循环执行(2)~(7),直到视频读完。 为了验证文中所提算法的有效性,选用两段有代表性的高速交通视频。实验条件:VisualStudio2010平台,并运用OpenCV2进行编程。为了保证视频的保密性,视频中有关地点、车牌、时间等信息已被抹去。每段视频都分别采用传统GMM、文中改进的GMM和手工提取前景方法进行比较。实验参数设置见表1。 第一段视频为高清高速交通视频,分辨率为1 600*1 200;第二段为标清高速交通视频,分辨率为704*576。算法没有进行阴影消除处理,因此前景为带阴影的车辆区域。为了更好地验证文中算法的有效性,分别在两段视频中选用2辆白小车和2辆黑小车作为实验对象。 实验对比结果如图3和图4所示。 图3 实验1中运动目标检测结果对比图 图4 实验2中运动目标检测结果对比图 参数数值混合高斯模型的模型个数K3混合高斯模型的背景学习率θ0.02与模型匹配的标准差系数C2.5B个背景模型的权重阈值T0.7 通过两次实验可以看出,与传统GMM相比,文中提出的GMM改进算法可以有效地减少噪声的干扰并提高运动目标检测的完整性。 为了更直观地描述该算法的准确性与完整性,采用以下两个量化指标来对实验结果进行分析[15]:检测准确率(DR)和误检率(FAR)。 (15) 式中:TP表示检测出属于前景区域的像素点个数;FN表示属于前景区域但未被检测出的像素点个数;FP为属于前景区域但被误检为前景的像素点个数。 真实运动区域由手工画出,从各实验中随机抽取100帧图像来进行统计分析,结果如表2所示。 表2 两个实验中运动目标检测的DR和FAR对比 % 通过表中数据可见,传统GMM的平均检测准确率为88%,而文中提出的改进方法在误检率较低的同时,平均检测准确率接近95%。 在传统混合高斯背景模型算法的基础上,文中提出一种基于像素纹理特征的混合高斯背景模型的运动目标检测算法。实验结果表明,运用该算法能够较完整、准确地提取出运动目标,特别是在外部环境比较复杂时效果改善较大。然而由于在高斯混合建模过程中要提取像素周围5*5图像块的均值、标准差、最大值、最小值和当前像素值,因此增加了算法的运算量。在以后的研究工作中,将重点考虑该算法的计算复杂性,降低该算法的计算开销。 [1] 刘 荣,金国伟.基于背景差分和光流法的运动目标检测与跟踪[J].现代制造技术与装备,2015(2):8-11. [2] 裴巧娜.基于光流法的运动目标检测与跟踪技术[D].北京:北方工业大学,2009. [3] 郑 佳,李江勇.基于背景差分和信息熵的运动目标检测算法[J].激光与红外,2014,44(5):563-566. [4] 林洪文,涂 丹,李国辉.基于统计背景模型的运动目标检测方法[J].计算机工程,2003,29(16):97-99. [5] 刘 伟,刘 宁.一种基于无味滤波的当前统计模型跟踪算法[J].数字技术与应用,2015(3):119-120. [6] 霍电广.基于视频的时空融合特征提取算法研究[D].上海:华东理工大学,2015. [7]StaufferC,GrimsonW.Adaptivebackgroundmixturemodelsforreal-timetracking[C]//Proceedingsofthe1999IEEEconferenceoncomputervisionandpatternrecognition.Piscataway:IEEE,1999:246-252. [8]ZhangYunchu,LiangZize,HouZengguang,etal.AnadaptivemixtureGaussianbackgroundmodelwithonlinebackgroundreconstructionandadjustableforegroundmergeneetimeformotionsegmentation[C]//ProcofIEEEinternationalconferenceonindustrialtechnology.[s.l.]:IEEE,2005:23-27. [9] 宋雪桦,陈 瑜,耿剑锋,等.基于改进的混合高斯背景模型的运动目标检测[J].计算机工程与设计,2010,31(21):4646-4649. [10]DickinsonP,HunterA,AppiahK.Aspatiallydistributedmodelforforegroundsegmentation[J].ImageandVisionComputing,2009,27(9):1326-1335. [11] 周建英,吴小培,张 超,等.基于滑动窗的混合高斯模型运动目标检测方法[J].电子与信息学报,2013,35(7):1650-1656. [12]KohonenT,KaskiS,LappalainenH.Self-organizedformationofvariousinvariantfeaturefiltersintheadaptivesubspaceSOM[J].NeuralComputation,1997,9(6):1321-1344. [13] 符 笛,尹 东,孙 涛.一种基于分裂高斯混合模型的背景建模算法[J].计算机工程,2015,41(4):190-194. [14] 李亚南,周 勇,田瑞娟.基于混合高斯模型和三帧差法的背景建模[J].兵工自动化,2015,34(4):33-35. [15]FakharianA,HosseiniS,GustafssonT.Hybridobjectdetectionusingimprovedgaussianmixturemodel[C]//Procofinternationalconferenceoncontrol,automationandsystems.Gyeonggido:[s.n.],2011:1475-1479. Research on Gaussian Mixture Background Modeling Algorithm Based on Texture Feature FENG Pu,LI Yu-hui,LI Bo,YOU Xu-chen (Faculty of Information Engineering and Automation,Kunming University of Science and Technology,Kunming 650500,China) Moving target detection in the intelligent transportation system is a fundamentaland key issue.Traditional Gaussian mixture model can better detect moving targets,but without considering the local characteristics of pixels,resulting in the error detection rate increases of moving target.To solve these problem,on the basis of idea of subspace,an improved Gaussian mixture model algorithm based on local texture features for pixel is put forward.It uses the average,standard deviation,maximum,minimum,and current pixel values around pixel 5*5 image block as local texture features,and establishes Gaussian mixture background model for moving object detection.After extensive comparison of experimental results,it shows that the algorithm can more accurately and completely detect moving targets and has good environmental adaptability.When the color of moving target area is similar with corresponding background area,the detection results improved is obvious. moving target detection;Gaussian mixture model;local texture feature;background model 2015-07-15 2015-10-02 时间:2016-03-22 国家自然科学基金资助项目(61363043) 冯 璞(1990-),男,硕士研究生,研究方向为数字图像处理。 http://www.cnki.net/kcms/detail/61.1450.TP.20160322.1521.078.html TP391.4 A 1673-629X(2016)05-0022-05 10.3969/j.issn.1673-629X.2016.05.0052 改进后的算法
3 改进高斯混合模型的算法流程
4 实验结果及分析



5 结束语
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25软件(2020年3期)2020-04-20小天使·二年级语数英综合(2019年4期)2019-10-06红领巾·萌芽(2019年8期)2019-08-27小学生学习指导(低年级)(2019年6期)2019-07-22摄影之友(影像视觉)(2018年12期)2019-01-28中国与非洲(法文版)(2017年10期)2017-11-23Coco薇(2017年8期)2017-08-03Coco薇(2015年5期)2016-03-29CHIP新电脑(2016年3期)2016-03-10
