温室自走式自动喷雾机的研制
2016-02-08 12:26李进海王昱潭杨术明
河南农业科学 2016年7期
李进海,王昱潭,杨术明,陈 云,徐 洋,赵 泽
(宁夏大学 机械工程学院,宁夏 银川 750021)
温室自走式自动喷雾机的研制
李进海,王昱潭*,杨术明,陈 云,徐 洋,赵 泽
(宁夏大学 机械工程学院,宁夏 银川 750021)
针对温室内空间密闭、有害气体多、湿度大和温度高等条件下,人工施药会对工作人员身体健康造成很大危害的问题,设计适用于温室的自动喷雾装置。该装置的设计主要包括移动平台的设计、自动控制装置的设计和喷雾系统的引进与优化设计。利用三维软体模拟设计,并结合实际温棚空间结构和理论分析,研制具有针对性和互换改造性的自动喷雾装备,且在实际试验后进行改进优化,满足特定温室环境下对植株无人、高效自动喷药的植保作业。在温室大棚内测试了药液在葡萄叶片上的雾滴覆盖率及沉积密度,葡萄上部、中部、下部叶片正面平均分别有77.32%、60.30%、45.75%的药液覆盖率,单位面积雾滴个数平均分别为43、33、27个/cm2,表明该装置可以达到对病虫害防治的要求。
温室; 喷雾; 自动; 植保; 研制
设施农业近年来在我国发展迅速,已成为农民增收的一条重要途径。相对于传统农业,设施农业病虫害问题更加突出。但温室内空间密闭、有害气体多、湿度大、温度高,人工施药会对工作人员的身体健康产生很大危害。我国温室植保喷雾机械80%仍为背负式等手动喷雾器,“跑、冒、滴、漏”现象严重,农药利用率只有20%左右,同时因施药中毒人数每年都在递增。因此研制和开发新型温室内专用施药装备,减少对作业人员健康的损害具有十分重要的意义[1-8]。目前温室自动喷雾装置成为国内外研究热点。
在欧美国家,对温室喷雾装置改造已经比较成熟,能适应不同条件下对温室自动喷雾的需求。美国Rowe等[9]设计的温室自动喷药系统,Sammons等[10]研制的温室喷雾机器人,以及Burks等[11]开发的6轮差动驱动的温室喷雾小车等在实现温室自动喷雾方面均起到了很好的作用。在日本,温室自动喷雾产品的市场化和品种的系列化也已经基本实现[12-13]。但这些系统造价普遍偏高,在我国还难以普及推广。国内对温室自动喷雾系统的研究工作也取得了很大的进步。陈志青[14]研制了智能对靶喷雾室内机器人系统,陈艳巧[15]对温室型电动弥雾机进行了改进,陈来荣等[16]对温室无人自动喷雾系统进行了设计,这些研究对实现温室自动喷雾均具有很大的借鉴意义。但是,这些装备在我国北方特殊的温室大棚结构下却受到了实际应用的限制,目前针对宁夏地区特定温室条件下整个自动化植保机械系统的设计与研究还未见报道。随着地方经济的发展和人们对自身安全的考虑,在相对密闭的温室环境下,对自动喷雾机的需求越来越迫切,因此设计开发了适合宁夏地区相对普遍温室大棚环境下的新型自动喷雾装备,并在宁夏贺兰国家级园艺产业示范园区进行了试验,报道如下。
1 设计要求、整机结构及工作原理
1.1 设计要求
实现温室环境下对种植的蔬菜、瓜果、花卉等的自动喷雾施药,将人们从繁重的植保作业中解放出来,减少农药飘浮物对人们身体健康的损害。设计的总体要求为:(1)能使药液覆盖率、雾滴沉积密度和雾滴分布均匀性达到对病虫害防治的要求;(2)制造成本低、可控性强、操作简单、互换改造性强、工作稳定可靠等。
1.2 整机结构
设计开发的温室自走式自动喷雾机由控制器(AT89C52)、移动平台、电机、小车、传动系统、离心式风机、三合一减速机、三缸柱塞泵、电磁阀、喷头等组成,其整体结构如图1所示。该装备的系统结构及其组成如图2所示,设计与制造主要技术参数如表1所示。
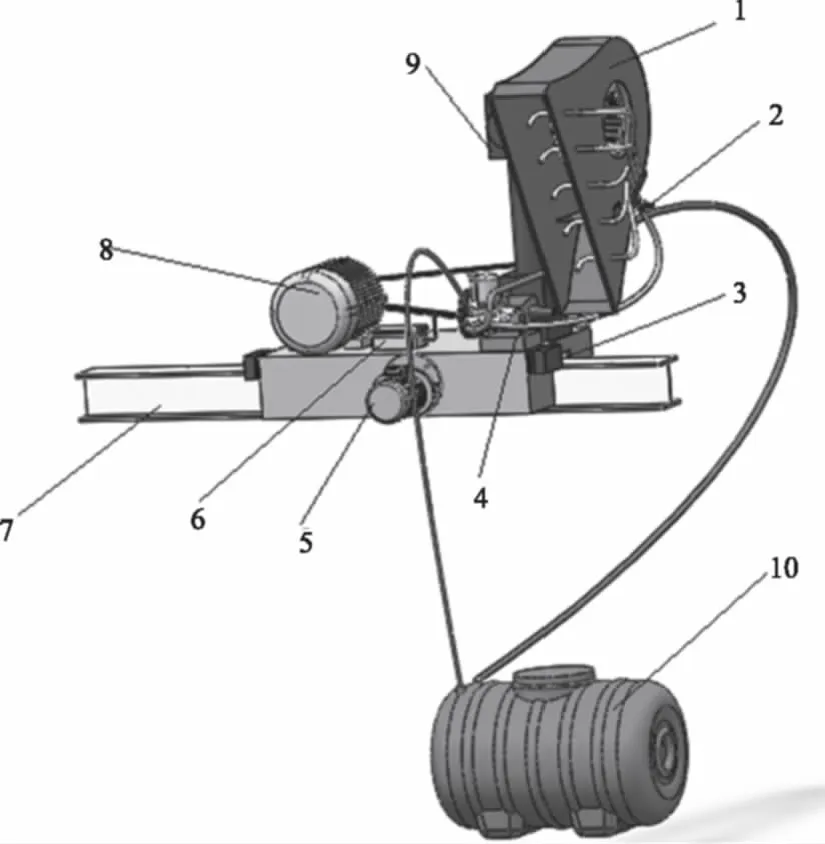
1.离心式风机;2.电磁阀;3.红外线防撞器;4.三缸柱塞泵;5.三合一减速机;6.控制器;7.工字梁;8.电机;9.传动装置;10.水箱
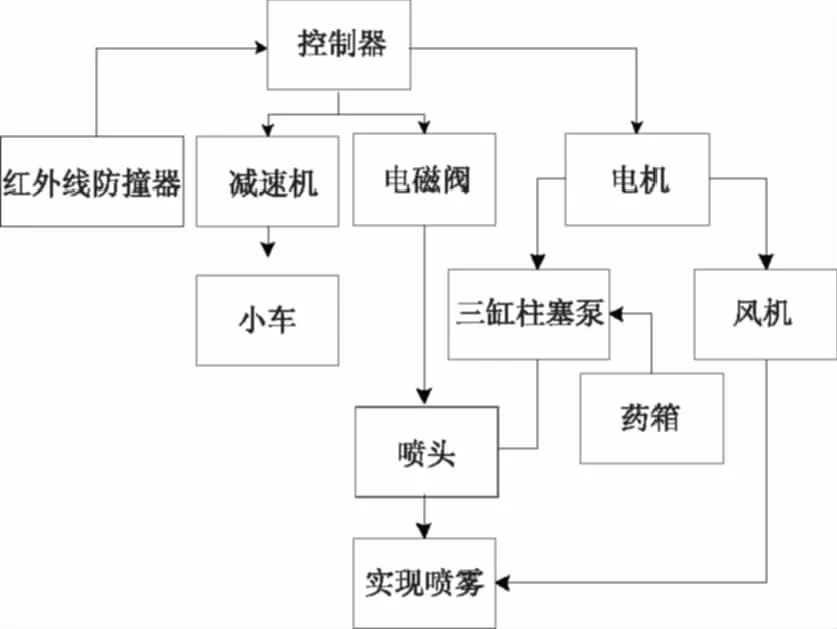
图2 温室自走式自动喷雾机系统结构及组成
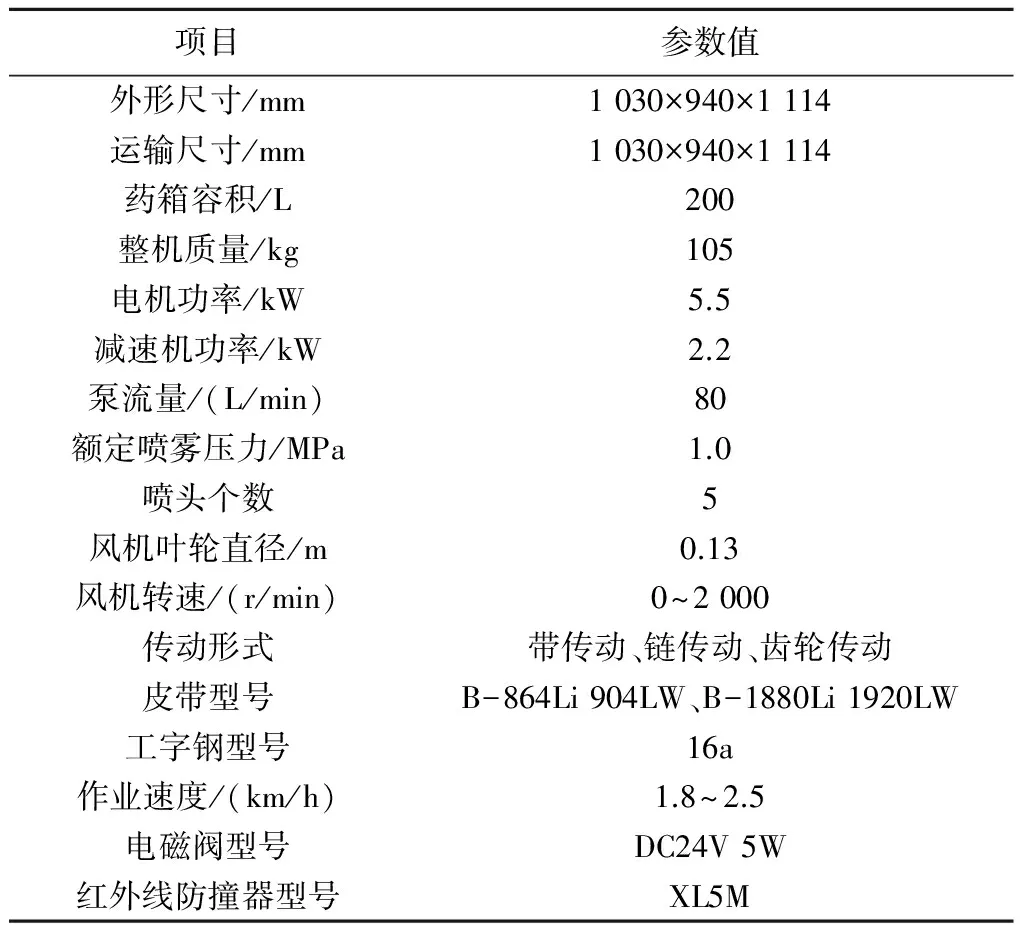
项目参数值外形尺寸/mm1030×940×1114运输尺寸/mm1030×940×1114药箱容积/L200整机质量/kg105电机功率/kW5.5减速机功率/kW2.2泵流量/(L/min)80额定喷雾压力/MPa1.0喷头个数5风机叶轮直径/m0.13风机转速/(r/min)0~2000传动形式带传动、链传动、齿轮传动皮带型号B-864Li904LW、B-1880Li1920LW工字钢型号16a作业速度/(km/h)1.8~2.5电磁阀型号DC24V5W红外线防撞器型号XL5M
1.3 工作原理
在喷雾系统的改进设计方面,主要是从其工作原理入手并结合实际试验结果进行了改进优化。喷雾系统方面,电动机经带传动和齿轮传动驱动三缸柱塞泵和风机工作,实现喷雾机的喷雾和叶轮的旋转。三缸柱塞泵的进水管通过滤器与水箱相连,出水管经过电磁阀与分流器相连,回水管与水箱相连。过滤器使用蚌埠市迅昌滤清器有限公司生产的CX0712B柴油滤清器,对药液起过滤作用,防止喷药时药液中的杂质堵塞喷头,降低喷雾效果。电磁阀起到控制喷雾开始和停止的作用。根据宁夏贺兰国家级园艺产业示范园区的温室大棚实际情况和多次试验结果,将风机和喷头调整为与传动轴呈30°的作业角度,可使雾滴覆盖需要被施药的植被。喷头喷出的药液在出风口二次雾化,随气流吹向标靶,由于气流将叶片上下翻动,故药液可均匀附着在标靶叶片的正面和背面,提高了药液的附着率和利用率。
移动平台的侧面安装减速机,减速机经链传动驱动小车沿工字梁行走。为防止超程,小车的两端装有红外线防撞器,当小车与工字梁末端安装的反射板间的距离小于阈值时,减速机反转,驱动小车向相反的方向行走。
2 关键部分的设计
2.1 温室自动喷雾系统移动平台设计
移动平台的设计包括增强导轨承载能力的设计和传动系统的设计。
2.1.1 增强导轨承载能力的设计 为实现自动喷雾机的行走和喷雾作业,设计了一个移动平台。移动平台的导轨经力学设计、校核计算和与实际滑轮的配合,最终采用16 a工字钢,沿温室长轴方向搭建,并在70 m长导轨的下方每间隔5 m安装一个托架(结合导轨刚度校核计算和温室大棚大架布置间距确定的间隔距离为5 m),共均匀布置安装13个托架,托架的上端与温室大棚大架相连,进而提高工字梁的承载能力,保证导轨的刚度,托架的安装密度为每5 m工字梁处安装一个,托架结构如图3所示。该移动平台易于安装和扩展,能在温室的纵向方向实现自动往复运动。
2.1.2 传动系统的设计 传动系统主要由带轮传动、齿轮传动和链传动组成。根据作业要求,喷雾系统的传动分为两路,一路经过1-2-3-4-5-6-7-8驱动风机叶轮旋转,另一路经过1-2-3-4-9-10-11-12驱动三缸柱塞泵工作(图4A)。行走系统经过13-14-15-16和13-17-18-19驱动小车沿工字梁行走(图4B)。
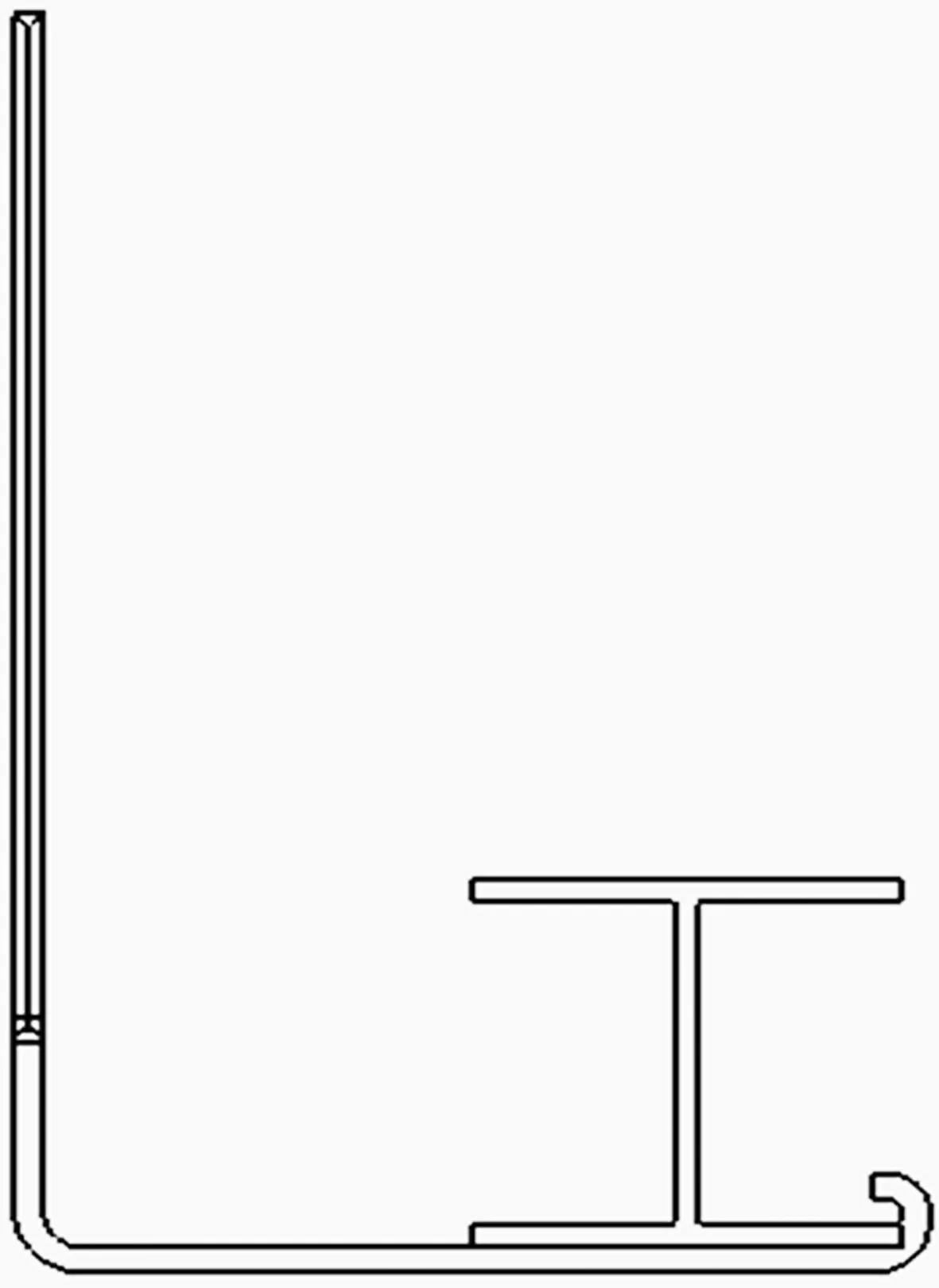
图3 托架结构
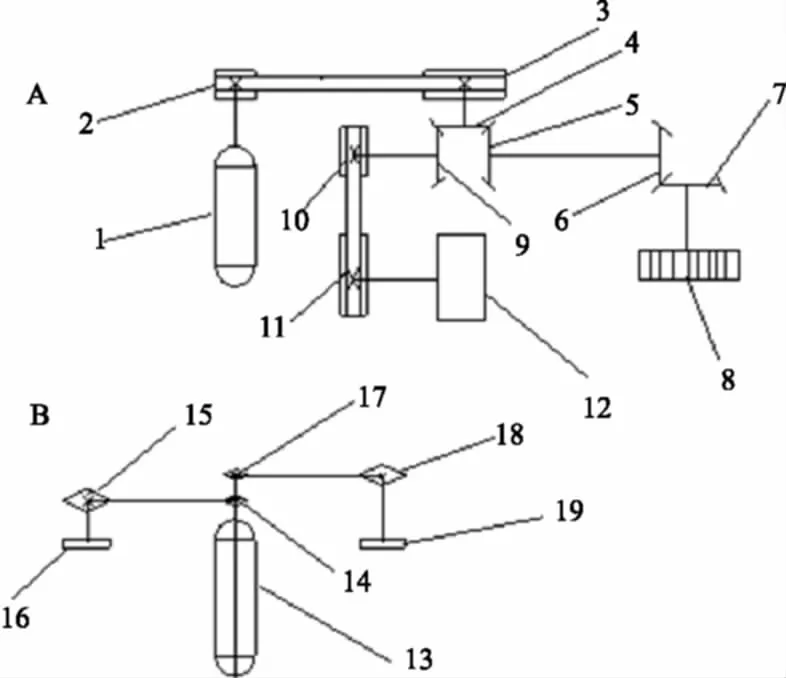
A.喷雾系统;B.行走系统。1.电机;2.小带轮1;3.大带轮1;4.锥齿轮1;5.锥齿轮2;6.锥齿轮3;7.锥齿轮4;8.风机叶轮;9.锥齿轮5;10.小带轮2;11.大带轮2;12.三缸柱塞泵;13.减速机;14.小链轮1;15.大链轮1;16.车轮1;17.小链轮2;18.大链轮2;19.车轮2
2.2 自走式喷雾机自动控制装置的设计
控制器硬件电路主要由主控模块、电机驱动模块、红外模块、信号接收模块以及信号转换模块组成。主控模块是温室自走式自动喷雾机控制器的核心模块,负责自走式自动喷雾机控制器各模块的管理;AT89C52产生的电流很小,不足以带动步进电机,因此可采用L298芯片作为电机驱动模块驱动;红外模块主要作用是当小车与反射板的距离小于阈值时,反馈信号给主控模块,使减速机反转,避免产生超程问题;信号接收模块主要用来接收遥控器信号发射模块发出的信号,通过信号转换模块将电位器信号转成电压信号传送给主控模块;对于电磁阀的驱动,采用了单片机控制继电器驱动电磁阀的方法。控制器整体组成如图5所示。
控制程序流程如图6所示。对于该控制程序的设计需要说明以下两点:一是t为信号接收模块接收的上位机信号,t=1、2、3、4时分别代表上位机发出的喷雾、喷雾机行走、停止喷雾以及喷雾机停止行走的信号;二是c为红外线防撞器与发射板之间设定的阈值,x、y分别代表喷雾机沿工字梁行走的2个方向,r为控制减速机转向的变量,当x或y小于阈值c时,分别将0或1赋值给变量r,r=0时为减速机正转,r=1时减速机反转。
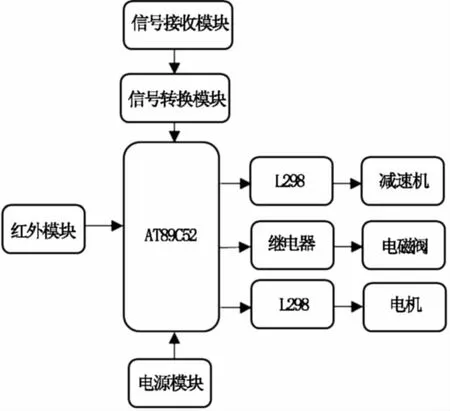
图5 控制器整体组成
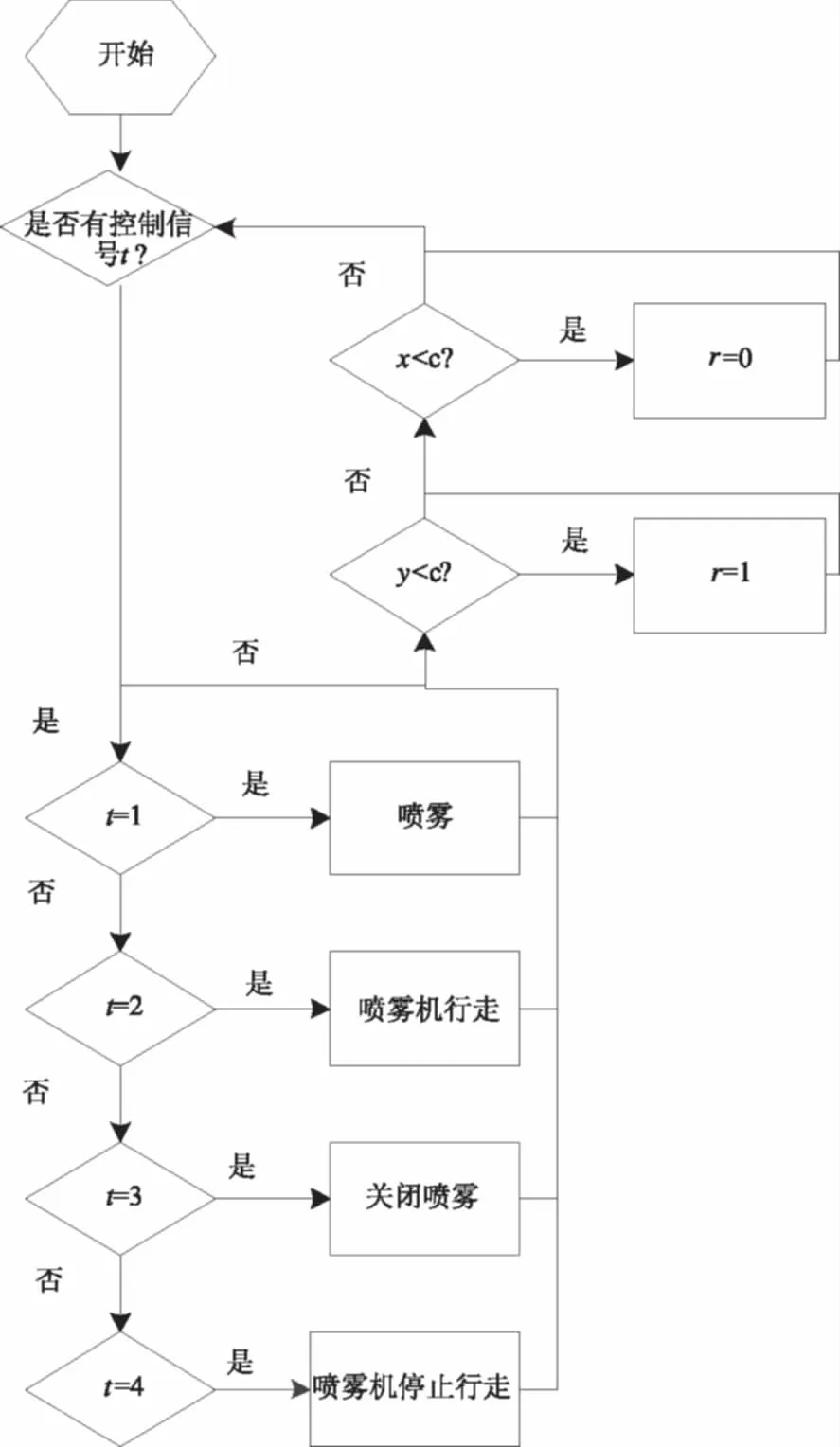
图6 控制器控制流程
2.3 风送式喷雾系统的设计
风机是风送式喷雾系统关键部件之一,根据不同作物的生理特性和栽培模式设计、选用匹配的风机形式,可以有效地提高药液利用率,改善施药效果。风送式喷雾机风机类型可分为轴流式和离心式两类,轴流式风机具有转速高、风量大、平均效率高的特点。离心式风机风量较轴流式小,但风压较大,可以增加叶片的扰动翻转,从而提高叶背的药液覆盖率[17-19]。根据本设计中温室大棚的结构和喷雾装置的布置位置,采用离心式风机更能满足该结构类型温室施药的实际需求。
2.3.1 风量的计算 现阶段风送式喷雾机风量计算采用置换原则,即喷雾机风机吹出带有雾滴的气流,此气流应完全驱除并置换风机至作物空间的全部空气[20-21]。宁夏贺兰国家级园艺产业示范园区温室大棚作物种植为标准栽培模式。根据以上要求可绘制风量置换简图如图7所示。
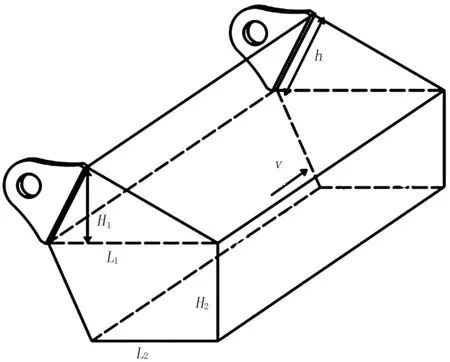
图7 温室自走式自动喷雾机风量置换图
假设风送式喷雾机作业时风机转速和喷雾机行进速度保持不变,根据置换原则的原理,此时风机的风量应略大于该七面体的体积,可以按照公式(1)计算施药所需风量。

图7和式(1)中,Q—风机风量(m3/s),v—作业速度(m/s),h—喷雾机出风口长度(m),H1—出风口上端到出风口下端的垂直距离(m),H2—出风口下端到地面的垂直距离(m),L1—出风口下端到植株的距离(m),L2—行宽(m),K—气流衰减和沿途损失确定的系数(取1.1~1.2)。
图7中,h=0.9 m,风机与传动轴呈30°夹角,可得H1≈0.8 m,L1=1.8 m;风机出风口上端距离地面的垂直高度约为2.8 m,可得H2=2 m,假设作业速度v为0.5 m/s,K取1.1,L2= 1 m,求得Q≈2 m/s。2.3.2 风机的传动设计 风机的传动设计首要考虑的是风机的转速,风机转速是决定风机送风量的关键因素。由图8可以看出,空气由轴向进入风机,经叶轮加速,自风机罩开口处由叶轮离心力抛出风机。
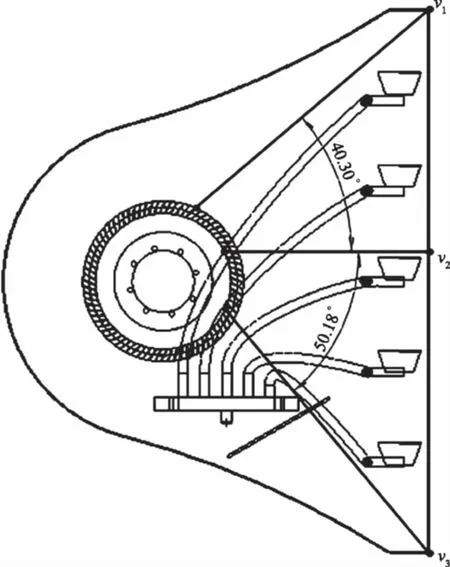
图8 风机出口风速简图
(2)
v1x=v1cos40.30°
(3)
v3x=v3cos50.18°
(4)
(5)


(6)
式中,叶轮半径为定值,r=0.13 m。
(7)

2.3.3 风机的功率匹配 从风机效率、噪声、结构尺寸等多方面考虑,选定风机转速为1 100 r/min,可以通过公式(8)计算风机转动所需要的轴功率。
(8)
式中,N—风机轴功率(kW),ηi—叶轮效率(取0.95),ηm—机械效率(取0.85),P—全压(取800 Pa)。
将实际风量值、叶轮效率和机械效率代入式(8),求得风机转动所需要的轴功率为3.6 kW。故上海创新电机厂生产的Y132s1-2电机(5.5 kW)即可满足要求。
3 温室自走式自动喷雾机性能测试
3.1 试验地点
2016年1月17日在宁夏回族自治区银川市永宁县玉泉营西夏王葡萄酒业有限公司葡萄种植基地进行了喷雾机在温室大棚内的应用试验。
3.2 试验方法
依据JB/T 9782—1999《植保机械通用试验方法》及GB /T 17997—2008《农药喷雾机(器)田间操作规程及喷洒质量评定》对温室自走式自动喷雾机进行性能测试。在大棚内任选30株葡萄,每株葡萄上任选上、中、下3片叶子,其根据葡萄植株的高度所定。每片叶子上使用回形针夹住一张2 mm×5 mm的纸卡,用于测量雾滴沉积覆盖率。
3.3 试验结果
温室自走式自动喷雾机在压力1.0 MPa、风机实际转速1 400 r/min、行驶速度0.5 m/s的条件下,葡萄上部叶片正面平均有77.32%的药液覆盖率,单位面积雾滴个数平均为43个/cm2;中部叶片正面平均有60.30%的药液覆盖率,单位面积雾滴个数为33个/cm2;下部叶片正面平均有45.75%的药液覆盖率,单位面积雾滴个数为27个/cm2。
采用风送喷雾防虫或治病时,喷洒在作物上的雾粒数应不小于25粒/cm2,通过数据分析,温室自走式喷雾机在植株叶片上的雾滴点数可以达到对病虫害防治的要求。
4 小结
温室自走式喷雾机是在总结前人研究成果的基础上,针对宁夏地区温室大棚特点设计的。该喷雾装置主要由移动平台、自动控制装置和风送式喷雾系统组成,通过无线自动控制系统,实现风送式喷雾机的喷雾作业和沿移动平台自动前、后移动。该系统最大的特点是可以无线遥控自动控制,避免工作人员在室内操作而引起的施药中毒现象发生。本设计装备满足特定温室环境下对植株无人、高效自动喷药的植保作业,能够有效提高农药的利用率并降低环境污染,对我国温室施药具有重要的指导和借鉴意义。该装备和设计方法也为其他不同类型的温室自走式喷雾机的设计开发提供了思路。
[1] 张霞.温室蔬菜病虫为害的特点及综合防治技术[J].内蒙古农业科技,2006(7):27-28,31.
[2] 李晓仁,李虹,魏文生.日光温室病虫害发生原因浅析与综合防治对策[J].北方园艺,2000(4):45-46.
[3] 初江,徐丽波,姜丽娟,等.设施农业的发展分析[J].农业机械学报,2004,35(3):191-192.
[4] 赵创建,张茂团,千琼丽.温室蔬菜病虫害发生特点及防治对策[J].西北园艺,2006(1):29-30.
[5] 何雄奎.改变我国植保机械和施药技术严重落后的现状[J].农业工程学报,2004,20(1):13-15.
[6] 李宝筏.农业机械学[M].北京:中国农业出版社,2003:233-234.
[7] 狄恩仓,范利红,李保谦,等.设施农业的现状及发展趋势[J].农村·农业·农民,2005(3):24.
[8] 徐向峰,杨广林,王立舒,等.我国设施农业的现状及发展对策研究[J].东北农业大学学报,2005,36(4):520-522
[9] Rowe D E,Malone S,Yates Q L.Automated greenhouse spray system for increased safety and flexibility[J].Crop Sci,2000,40(4):1176-1179.
[10]Sammons P J,Furukawa T,Bulgin A.Autonomous pesticide spraying robot for use in a greenhouse[C].Sydney:Australian Conference on Robotics and Automation,2005:1-8.
[11]Burks T F,Subramanian V,Singh S.Autonomous greenhouse sprayer vehicle using machine vision and ladar for steering control[C]//Automation technology for off-road equipment.Kyoto:[出版者不详],2004.
[12]佘大庆.我国植物保护机械现状及发展战略研究[D].杨凌:西北农林科技大学,2009.
[13]朱济生.日本植保机械现状及发展趋势[J].农药译丛,1984,6(2):8-9.
[14]陈志青.喷雾机器人控制系统研制[D].北京:中国农业大学,2002.
[15]陈艳巧.温室型电动弥雾机的改进设计与试验分析[D].泰安:山东农业大学,2007.
[16]陈来荣,冀荣华,赵亚青,等.温室无人自动喷雾系统设计[J].湖北农业科学,2011,50(3):587-589.
[17]周海燕.风机性能测试系统的设计与研究[D].北京:中国农业机械化科学研究院,2009.
[18]北京农业工程大学.农业机械学:上[M].北京:中国农业出版社,2001:334.
[19]党海波.离心式通风机与轴流式通风机的对比分析[J].煤,2012,21(1):65-67.
[20]戴奋奋.风送喷雾机风量的选择与计算[J].植物保护,2008,34(6):124-127.
[21]张晓辉,姜宗月,范国强,等.履带自走式果园定向风送喷雾机[J].农业机械学报,2014,45(8):117-122.
Design of Self-contained Automatic Spray Machine for Greenhouse
LI Jinhai,WANG Yutan*,YANG Shuming,CHEN Yun,XU Yang,ZHAO Ze
(College of Mechanical Engineering,Ningxia University,Yinchuan 750021,China)
Under the conditions of closed space,a lot of harmful gas,high humidity and temperature in greenhouse,artificial spray of pesticides has a big damage to personal health,so this study designed an automatic spray system for greenhouse.It included the design of mobile platform and automatic control device, introduction and optimization of spray system.This study used 3D software to simulate the design combined with actual greenhouse space structure and theoretical analysis,and produced a self-propelled sprayer device of pertinence and interchangeable transformation,which was then improved and optimized after actual experiment,realizing unmanned and efficient automatic spray under certain conditions of greenhouse. Pesticide liquid spraying coverage and deposition density on the grape leaf in greenhouse were determined, and results showed that pesticide liquid spraying coverage attached to rates of 77. 32%,60.30% and 45.75% at the right side of upper,central and lower parts of grape leaf on average,and the numbers of droplets per unit area were 43,33,27 respectively,which demonstrated that the automatic spray system meets the requirements of pests control in greenhouse.
greenhouse; spray; automation; plant protection; design
2015-11-25
宁夏大学科技开发与应用研究基金项目(KF1404)
李进海(1988-),男,山东烟台人,在读硕士研究生,研究方向:农业智能装备。E-mail:jinhai_lucky@163.com
*通讯作者:王昱潭(1974-),男,宁夏盐池人,副教授,博士,主要从事现代农业装备研究。E-mail:wang_yt@nxu.edu.cn
S491
A
1004-3268(2016)07-0137-06
猜你喜欢
农业开发与装备(2022年7期)2023-01-05
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
山东冶金(2022年1期)2022-04-19
农技服务(2020年7期)2020-12-17
中小企业管理与科技(2019年3期)2019-03-07
妇女生活(2018年12期)2018-12-14
农机使用与维修(2018年3期)2018-03-23
林业机械与木工设备(2017年3期)2017-03-08
山东工业技术(2016年15期)2016-12-01
现代制造技术与装备(2015年4期)2015-12-23