
应用于远程图像监控的四轴飞行器
2016-02-06 05:44廖健林许生鸿蔡展标胡均万
电脑与电信 2016年11期
廖健林 许生鸿 蔡展标 刘 燕 胡均万
(嘉应学院电子信息工程学院,广东 梅州 514015)
应用于远程图像监控的四轴飞行器
廖健林 许生鸿 蔡展标 刘 燕*胡均万
(嘉应学院电子信息工程学院,广东 梅州 514015)
介绍一种基于5.8 G图像传输技术,可以用于森林防火防盗巡逻、电力巡检等情况的四轴飞行器。该飞行器采用C o r t e x-M 4架构的ST M 3 2单片机作为主控芯片,以M PU 6 0 0 0运动传感器、H M C 58 8 3 L磁力计来获取无人机姿态位置信息。主控芯片将传感器所采集的值,利用惯性导航技术和数据融合技术通过四元数运算求出当前的飞机姿态,然后通过PID算法实现稳定飞行。
5.8 G图像传输;ST M 3 2单片机;惯性导航技术;数据融合;四元数;PID算法
1 引言
四轴飞行器属于一种小型飞行器,可以灵活在空中飞行,具有很高的可控性。利用搭载在四轴飞行器上的5.8G远程图像传输模块,可以通过显示屏观察回传过来的图像,替代人工巡逻等情况。从而节省人力物力,只需要一个操作人员通过观察远程传来的图像对飞行器进行操作。
一般来说,市场上很多四轴飞行器使用的电子调速器是通过脉冲宽度控制的,普遍控制频率都在200Hz~600Hz,根据四轴飞行器的设计要求,设计了一款利用IIC总线协议控制的电子调速器,控制频率提升到400KHz,从而提高飞行器的响应速度[1]。同时飞行控制板采用Cortex-M4架构的单片机,其主频可达168MHz,并且内核集成了FPU浮点运算单元,提高了姿态解算和PID运算的速率。
四轴飞行器机体采用碳纤维材料作为中心板,铝方管作为机臂,使机身重量降低的同时不改变机身强度,同时增加了续航时间。
2 总体设计
2.1 机械结构设计
机架中心板使用碳纤维,机臂使用铝方管,如图1所示。这样的架构使用的材料最少、质量最轻、强度最大和灵活性最高。
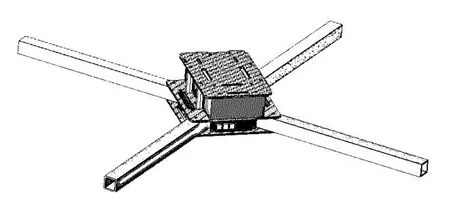
图1 机架结构图
2.2 系统结构设计
四轴飞行器主要由遥控器、飞行控制板、图像传输和动力系统组成[2],其系统结构图如图2所示。
遥控器端单片机通过采集操作杆的ADC值,经过2.4G发射模块发送到飞行控制板端。遥控器端可以通过按键来完成功能设置和参数调节等操作,蜂鸣器用作遥控电池低电压报警。
飞行控制板端通过SPI总线获取MPU6000的陀螺仪和加速度计值,利用一系列的算法运算得出当前姿态,根据2.4G接收模块接收到的遥控数据调整姿态,实现一系列复杂的飞行动作。
图像传输选用5.8G图像传输技术的TS835模块,传输距离可达2公里远,可以通过观察远程回传的图像来控制飞行和巡逻工作。动力系统则采用IIC总线控制方案设计出电子调速器。
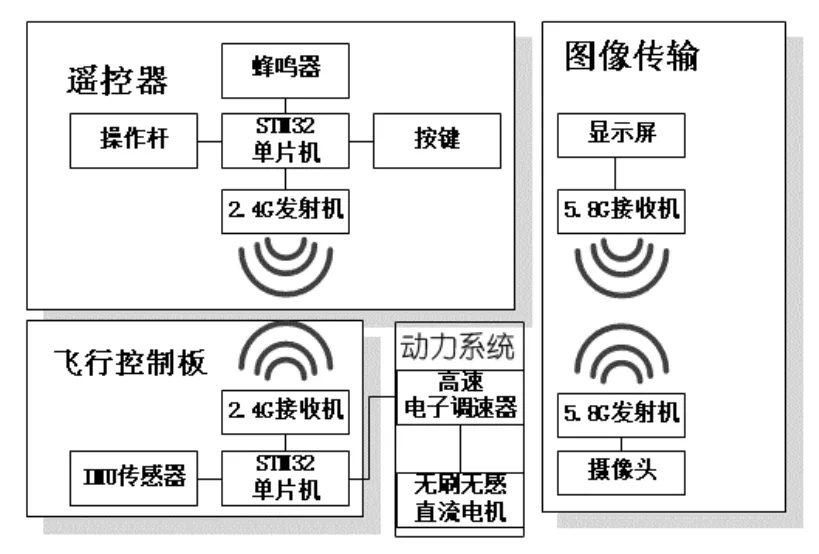
图2 系统结构图
3 硬件设计
3.1 飞行控制板设计
飞行控制板硬件电路结构示意图如图3所示,由于STM32单片机具有性价比高、外设丰富、主频较高和带有浮点运算单元等优点,采用了STM32F407VGT6这款芯片作为主控核心[3]。MPU6000运动传感器内部集成了高精度的陀螺仪和加速度计,且价格低廉性能稳定。HMC5883L具有高灵敏度和线性高精度的特点,故用于作为航向角的校准。
四轴飞行器采用IIC控制的电子调速器,因此要克服外围大电流对IIC总线所产生的电磁干扰,抗干扰电路采用了10K欧的电阻分别上拉时钟线和数据线到5V,然后再用1K欧的电阻分别串联到时钟线和数据线上。
2.4 G接收模块通过SPI总线控制,直接读取由遥控器端发送过来的控制数值,然后经过校验后送到PID作为参考值。
稳压电路采用了LP2992-3.3低噪声线性输出稳压芯片。

图3 飞行控制板硬件电路结构示意图
3.2 遥控器设计
遥控器电路结构示意图如图4所示,同样遥控器主控芯片选用STM32F103RBT6,然后通过内部ADC采集控制摇杆的电压值,将该值进行限幅和死区设置转化成控制值,最后通过SPI总线控制2.4G发射机发送该数据。用户可以通过按键设定飞行器的飞行参数等。若遥控器电池过低,即单片机ADC采集的值低于设定低压值时,蜂鸣器通电发声提醒用户充电。
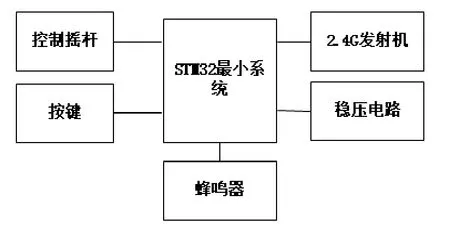
图4 遥控器电路结构示意图
3.3 电子调速器设计
电子调速器电路采用AVR单片机设计系统部分,结构示意图如图5所示,其中Atmega 8A作为控制芯片,通过ADC采集和过零检测电路检测过零信号,若检测到过零信号,主控通过PWM控制电机驱动电路实现换相。
电机驱动电路由3对N和P组合的MOSFET管两两导通控制相位导通,从而实现电路换流,实现电机换相。
主控器通过定时器中断,开启电流测量,电流测量电路由一条固定阻值的蛇形走线,并联一个小电容,最后通过主控器的ADC采集该电压值,然后转化成电流值。
低压保护电路通过电阻分压来扩大测量量程,然后通过并联一个小电容作为滤波,直接输出到主控的ADC,再得出电压值。

图5 电子调速器电路结构示意图
4 程序设计
4.1 主控程序
飞行控制板上电后,单片机初始化所需的通信总线如IIC、SPI、UART,同时初始化定时中断。通过通信总线来配置和初始化传感器工作。开启无线接收,接收来自遥控发出的数据,返回机体姿态等信息回遥控,电脑上位机通过读取遥控串口输出的值来获取飞机返回的信息。单片机根据传感器采集的数值做一系列的数学运算得到机体姿态信息,通过与接收到的遥控值做误差输入到PID运算子程序,通过PID来调节飞机,从而达到所期望的姿态[4],其主控程序流程图如图6所示。
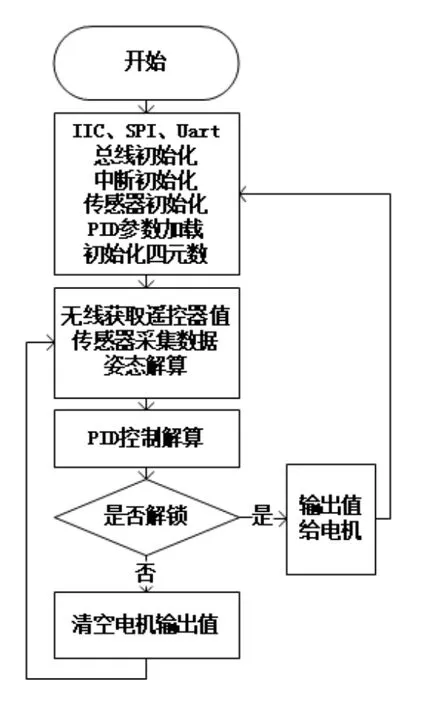
图6 主控程序流程图
4.2 姿态解算
系统上电初始化后获取各传感器的原始数据,经过一系列的滤波得到比较准确的值,利用四元数将地理重力加速度变换到飞行器坐标上的加速度,即将n系坐标系(地理坐标系)的数值转换到b系坐标系(机体坐标系)上得到重力分量,再把机体上的加速度计读取的值做归一化处理,然后与b系坐标系上的重力分量做外积,求出零偏值,最后通过比例-积分处理融合到三轴角速度上。将融合后的三轴角速度通过一阶龙格-库塔法,更新为四元数,再进行归一化处理。通过四元数转换欧拉角公式得到当前的航向角、俯仰角和横滚角,姿态解算流程图如图7所示[5]。

图7 姿态解算流程图
4.3 PID算法控制
运用串级PID位置式控制算法,把外环输出作为内环的误差输入,提高系统的稳定性。通过工程上的试凑方法分别得到比例P、积分I和微分D作用的参数大小。
PID控制算法流程图如图8所示[6],其中,对于外环部分:外环角度误差=期望角度-当前角度;外环积分+=外环角度误差;外环输出=外环角度误差*P+外环积分*I;为防止滞后效应,适当对积分做一下限幅。而对于内环部分:内环角速度误差=外环输出-当前角速度值;内环积分+=内环角速度误差;内环微分项=D*(上次角速度值-当前角速度);内环输出=外环角度误差*P+外环积分*I+内环微分项输出;并对上次角速度值进行保存;同样地对积分环节做一下限幅操作。

图8 PID控制算法流程图
5 系统测试
5.1 电子调速器线性度测试
由于PID控制器属于线性控制器,因此要保证控制通道与电机输出力矩是线性的。本文利用杠杆原理搭建了一个测试平台,对单个电子调速器进行了线性度测试。
线性度测试使用了胜利牌DM6234P非接触式数字转速测量表和精准台秤,分别测试出当前的单个新西达2208电机升力,从控制量为40开始每隔5取一个测试点,得出数据如表1所示,可以观察出数据分布大致呈一条斜线,可得该电子调速器线性度良好。
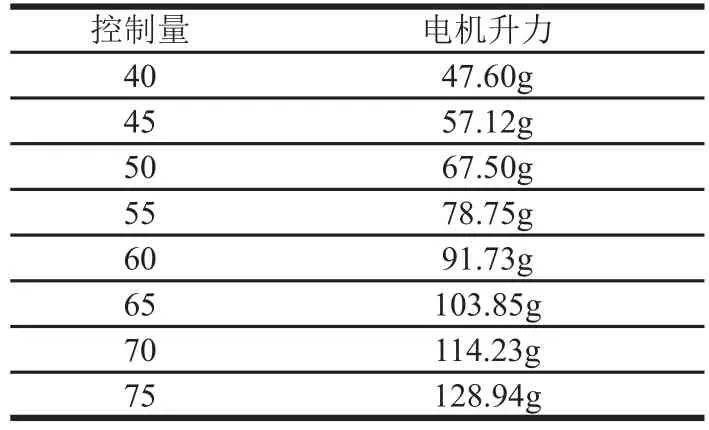
表1 电子调速器线性度测试
5.2 飞行测试
将油门缓抬高,使飞行器平稳离地2米高,观察地面站调试平台中显示的当前飞行器三维姿态,可以发现航向角略微有点偏差,但是横滚角和俯仰角却保持平稳,飞行器能够平稳地在空中飞行。通过遥控改变俯仰角,飞行器能平稳地实现前进和后退;改变横滚角,飞行器能平稳地实现左右移动;改变航向角,飞行器能旋转任意角度。实验飞行测试效果图参考图9。
对于遥控器的感应距离测试和图像传输距离测试,我们采取静止测试的途径,即是将四轴飞行器用尼龙扎带固定好,然后每隔100米轻抬一下遥控油门,同时观察屏幕的图像清晰度判断信号的强度,实际测量得到表2数据。

表2 遥控距离和图像传输距离测试

图9 实验飞行测试效果图
6 结语
该四轴飞行器通过MPU6000和HMC5883L采集数据,然后把飞行姿态解算成欧拉角,并根据当前姿态与遥控给定值做误差处理,再通过PID算法来实现遥控对飞机各种姿态的控制,其中包括俯仰、横滚、机动自旋等高难度动作,飞行器控制正常。同时实现其与电脑上位机的无线通信,实时得到四轴飞行器的姿态等信息,方便人们调试PID参数以及了解飞行器的运行状况。无刷无感电机电子调速器设计合理,具有带负载重、控制精度高和响应速度快等优点。通过显示屏观察5.8G模块回传的图像可见,在1.5公里以内图像清晰稳定。
[1]曹杰,史金飞,戴敏.基于M EG A 8单片机的无传感器无刷直流电机控制系统设计[J].自动化仪表,2 0 0 5(12):13-16.
[2]周建阳,陈家乐,薛斌,等.基于ST M 3 2四轴飞行器的设计[J].钦州学院学报,2 0 15(0 2):3 1-3 3.
[3]张天华.基于ST M3 2 F4系列单片机的四旋翼自主飞行器系统[J].电子制作,2 0 16(2 1):7-8.
[4]周贺.基于ST M 3 2单片机的三叶浆四旋翼飞行器设计[J].电脑知识与技术,2 0 14(2 1):512 6-512 8.
[5]朱阳,王伟成,王民慧.基于M PU 9 150的四轴飞行器姿态控制系统设计[J].制造业自动化.2 0 15(10):46-48.
[6]陆伟男,蔡启仲,李刚,等.基于四轴飞行器的双闭环PID控制[J].科学技术与工程,2 0 14(3 3):12 8-13 1.
AQuadcopter for Remote Image Monitoring
Liao Jianlin Xu Shenghong Cai Zhanbiao Liu Yan*Hu Junwan
(Jiaying University,Meizhou 514015,Guangdong)
This paper mainly introduces a kind of quadcopter based on 5.8G image transmission technology,which is widely used in the power patrol and daily forest patrol.This design takes Cortex-M4 architecture of STM32 microprocessor as the center core,and obtains the position and attitude of the UAV by the MPU6000 and HMC5883L.The data of the sensor is collected by the main control chip,and the current attitude of the aircraft is obtained by using the inertial navigation technology through the four element calculation.Finally,the control of flight attitude is realized by the PID algorithm.
5.8G image transmission technology;STM32 microprocessor;inertial navigation technology;data fusion techniques;PID algorithm
V249
A
1008-6609(2016)11-0024-05
廖健林(19 9 4-),男,广东佛山人,本科,研究方向为嵌入式Li n u x开发。
*通信作者简介:刘燕(19 8 9-)女,湖南永州人,助理实验师,硕士,研究方向为控制技术。
2 0 16年广东省大学生创新训练项目,项目编号:2 0 16 10 58 2 0 2 3;嘉应学院自然科学研究项目,项目编号:3 14E2 3。
猜你喜欢
园林科技(2021年2期)2022-01-19
石油沥青(2021年1期)2021-01-11
中医眼耳鼻喉杂志(2019年2期)2019-04-13
电子制作(2019年23期)2019-02-23
筑路机械与施工机械化(2018年1期)2018-03-06
消费导刊(2017年24期)2018-01-31
教育教学论坛(2017年34期)2017-08-30
山东工业技术(2016年15期)2016-12-01
魅力中国(2016年7期)2016-05-14
火控雷达技术(2016年2期)2016-02-06
