基于图像纹理分析的交通拥堵检测算法
2016-01-29 09:16袁彬,张勇
上海船舶运输科学研究所学报 2015年4期
袁 彬, 张 勇
(中海网络科技股份有限公司,上海 200135)
基于图像纹理分析的交通拥堵检测算法
袁彬,张勇
(中海网络科技股份有限公司,上海 200135)
摘要:为解决目前常用的交通拥堵检测方法存在的计算量大、检测延迟大等问题,提出一种基于图像纹理分析的道路交通拥堵检测算法。该算法以图像块为基本处理单元,通过分析块内图像纹理的空域和时域变化,计算出道路的空间及时间占有率,并综合二者的变化特性实现道路交通拥堵的自动和快速检测。直接将该方法利用于现场交通场景中进行分析,避免了交通参数检测和交通建模的过程,具有计算效率高和检测延时小的优点。试验结果表明:该方法能准确、快速地检测出实际监控视频中的交通拥堵状况,满足交通管理和交通诱导系统中的实际需要。
关键词:交通状况检测;背景更新;空域纹理分析;时域纹理分析
0引言
交通拥堵分为常发性和偶发性,如高峰期流量过大导致的交通堵塞和重大活动导致的交通量激增引发的拥堵等都会严重影响交通安全。当路段发生拥堵时,交通流状态会迅速发生改变,进而可能导致1个或更多个车道的交通被阻断。若不能快速识别出拥堵地点并进行处理,则会在短时间内引起道路通行能力下降或交通需求增加,从而严重影响交通的畅通,甚至引发二次事故。为减少交通拥堵带来的出行损失和其他负效应,可建立有效的交通状况判别方法,以快速发现拥堵的发生并进行及时处理,减少交通延误。
19世纪80年代美国加利福尼亚州运输部利用环形线圈检测器获得的占有率数据对交通状况进行了判断[1];1974年Cook开发了一种双指数平滑算法,将交通参数数据的双指数平滑值作为判断标准[2];1979年英国道路交通研究实验室开发了一种模式识别算法,将车辆行驶速度作为判断标准[2];1991年开发了莫尼卡算法,将连续车辆之间车头时距的测量值和方差、连续车辆之间的速度差作为判断标准[2];2001年Kerner提出了三相交通理论,按照实时的交通模式把交通流分成了自由流、同步流和宽移动拥塞等3种情况加以讨论[3-4]。当前国内外常见的检测交通拥堵的方式或工具有人工监测、环形线圈检测器、超声波探测器、视频检测器等。
(1) 人工监测方式准确率高,但需浪费大量的人力、物力;
(2) 环形线圈检测器的主要优点是线圈电子放大器已标准化,且技术成熟、易于掌握、测量精度较高,目前仍被大量使用,但线圈长时间埋在路面下,其使用寿命会受较大影响;
(3) 超声波探测器价格低、安装方便、维修容易且使用寿命较长,但因其检测域为锥形,无法适应车型和车辆高度的变化,存在车辆相互遮挡的问题,检测精度低;
(4) 视频检测无需破坏路面、安装简便、施工时不影响交通、易于移动、维护费用低,得到了广泛应用。目前,常用的基于视频的交通拥堵检测方法有:基于模型的交通拥堵检测[5-6],基于占有率、速度和流量等交通参数的交通拥堵检测[7-9]等,这些方法存在着运算量大、检测延迟长等问题。
对此,提出一种基于图像纹理分析的道路交通拥堵检测算法。该算法以图像块为基本处理单元,通过分析块内图像纹理的空域和时域变化,计算出道路的空间占有率和时间占有率,并综合二者的变化特性实现道路交通拥堵状况的自动和快速检测。该方法具有实施方便、检测精度高的特点,且很容易推广到检测占有率及拥堵长度等其他交通参数。
2道路交通拥堵检测算法
通过分析大量实际监控视频可知,当道路处于拥堵状态时,车辆在一定时间内行驶缓慢或静止不动且分布密集,空间占有率较高,时间占有率较大。根据该特征,采用空域纹理分析与时域纹理分析相结合的方法判断道路交通拥堵状况;采用背景差分法和帧差法分析图像纹理在空域和时域中的变化情况,进一步计算出道路的空间占有率和时间占有率,综合二者的变化情况判断道路交通拥堵状况。该算法延迟较小,可实现实时检测,并能减少单由时间或空间判断带来的误差。算法原理见图1。

图1 算法原理图
2.1 背景更新
背景差分法的关键是选择合适的图像作为背景,背景质量的好坏决定着后续处理的准确性。在实际应用中,受光照强度变化、光照角度和云层移动对阳光遮挡等光照条件变化,以及移动目标长时间停留和场景布置等不确定因素影响,场景的背景图像是动态变化的,若不及时更新初始背景,则其可能随着时间的累积发生改变,进而造成误检。常用的多帧平均法[10]、选择更新法等背景更新算法均基于初始背景,若初始背景估计错误,则会对更新效果产生较大影响。例如在车流量较大的场景中,估计的初始背景并不可靠。
鉴于以上分析,采用一种无初始背景约束的实时背景更新算法,该算法以块为基本处理单位,不使用初始背景,通过比较当前帧和前一帧SAD值的变化来更新背景。对于任一块t,用当前帧与前一帧对应的块数据进行SADt匹配,若匹配得上,则说明该块相对稳定,用计数器Ct记录其连续相对稳定的帧数。若该块能连续相对稳定一段时间,则说明该块已进入稳定状态,便可按一定的更新比例用当前帧数据更新背景。SAD值指的是像素块绝对值差,其计算式为

(1)
式(1)中:K1(m,n)和K2(m,n)为2个待比较的块,大小为kw,算法的实现步骤如下:
(1) 将图像划分成若干块,设每帧图像的大小W×H,每块图像的大小为w×h。其中:W为图像的宽度,即图像在水平方向上有W个像素;H为图像的高度,即图像在垂直方向上有H个像素;w为块的宽度,即块在水平方向上有w个像素;h为块的高度,即块在垂直方向上有h个像素。由此,图像在水平方向可分为W/w块,记为R;在竖直方向可分为H/h块,记为C;总块数为T=R×C。
(2) 对任一小块t,按式(1)计算SADt。若SADt小于设定的阈值,则计数器Ct加1,否则清零;给定计数器Ct的阈值Thc,若Ct≥Thc,则认为该小块已进入稳定状态。若是第一次达到稳定状态,则按照bt(m,n)=ft(m,n)更新背景,否则按照bt(m,n)=α·ft(m,n)+(1-α)·bt(m,n)更新背景,其中:bt(m,n)和ft(m,n)分别为背景图像和当前帧图像;m=0,1,2,…,w-1;n=0,1,2,…,h-1;0≤α≤1。
2.2 空域纹理分析
完成背景更新后,通过背景差分法将运动目标从背景中分离出来,若差分结果与背景相差较大,则说明运动目标存在,反之则运动目标不存在;当道路处于拥堵状态时,车辆在车道观测范围内占有极大比例,即出现较多连续运动目标,反之运动目标分布稀疏。为方便后续判断,可平滑处理差分结果并进行二值化分割。空域纹理分析的关键是通过图像空间的纹理变化情况统计出车道内运动目标的长度,进而获得道路的空间占有率。这里通过映射表实现视频图像每一行的像素距离到实际距离的转化。
手动画定至少3个点(这里选择3个点进行说明),这些点选取的条件是点与点之间的距离在实际路面相等。图2中,3个点形成2个像素段m和n,它们在实际路面上的距离是相等的。将点1和点3作为基准点,图2中3个点将车道线分为4段,所对应的实际距离分别为t1,t2,t3,t4,其中:t1和t2为相对于基准点3的实际距离;t3和t4为相对于基准点1的实际距离。此时各段距离可表示为

(2)

(3)
(4)
(5)
式(2)~式(5)中:a为实际道路中每段车行道分界线间的距离;m和n为车道中线上相邻两点的像素距离;l为所求点相对于所在区域基准点的像素距离。

图2 映射表标定示例
空域纹理分析的具体实现步骤如下:
(1) 对于整幅图像中的每个块,根据式(1)求出其当前帧和背景的SAD值,在块坐标系下求出每行的所有块SAD值的最大值;
(2) 对于块坐标系下的所有行,若某一行r中SAD的最大值大于给定的阈值,则将该行标记为1,否则为0;
(3) 统计目标车道中,标记为“1”的块的个数,并将其转化为实际距离,记为Ls;
2.3 时域纹理分析
时域纹理分析的主要目的是检测视频图像在时间上的纹理变化,这里采用帧差法对视频图像进行时域纹理分析,帧差的间隔可根据测试场景的不同进行改变,以获得较好的效果。当道路处于拥堵状态时,车辆在长时间内处于缓慢运行或静止不动状态,即帧差结果变化极小,时间占有率较大。为方便后续判断,可对帧差结果进行平滑处理并作二值化分割。通过分析图像时域纹理变化情况,进一步得到道路的时间占有率。时域纹理分析的具体实现步骤如下:
(1) 对于整幅图像中的每个块,根据式(1)求出其相隔一定帧的SAD值,在块坐标系下求出每行的所有块SAD值的最大值;
(2) 对于块坐标系下的所有行,若某一行r中SAD的最大值小于给定的阈值,则将该行标记为1,否则为0;
(3) 统计目标车道上标记为“1”的块的个数,记为Lt;
2.4 道路交通拥堵判断
在道路进入拥堵状态之前的一段时间内,车辆在所观测范围内占有极大比例 ,但此时车辆仍在缓慢运行,并未停止,这里称该状态为饱和状态并将其作为进入拥堵状态的过度状态。当饱和状态持续一段时间后,车辆几乎占满所观测车道范围,且长时间处于静止状态,此时道路进入拥堵状态。
结合以上特征,采用空域纹理分析与时域纹理分析相结合的方法判断道路交通状况。实际应用中,为提高准确率,可将车道分为几段,判断各段是否达到拥堵状态。该算法将空间占有率、车辆总长度及时间占有率与空间占有率的比值作为道路拥堵状态判断的关键参数,具体实施步骤如下:
(1) 通过空域纹理分析,计算出空间占有率和车辆长度的实际距离Ls;
(2) 通过时域纹理分析,计算出时间占有率;
(3) 当空间占有率大于阈值1,Ls大于阈值2且时间占有率与空间占有率的百分比大于阈值3时,进入饱和拥堵条件判断;
(4) 若有连续一定帧数满足饱和条件,则该车道进入饱和状态;
(5) 当某车道进入饱和状态时,判断“(3)”中各参数是否满足拥堵条件,若连续一定帧数满足拥堵条件,则该车道进入拥堵状态。
3试验结果分析
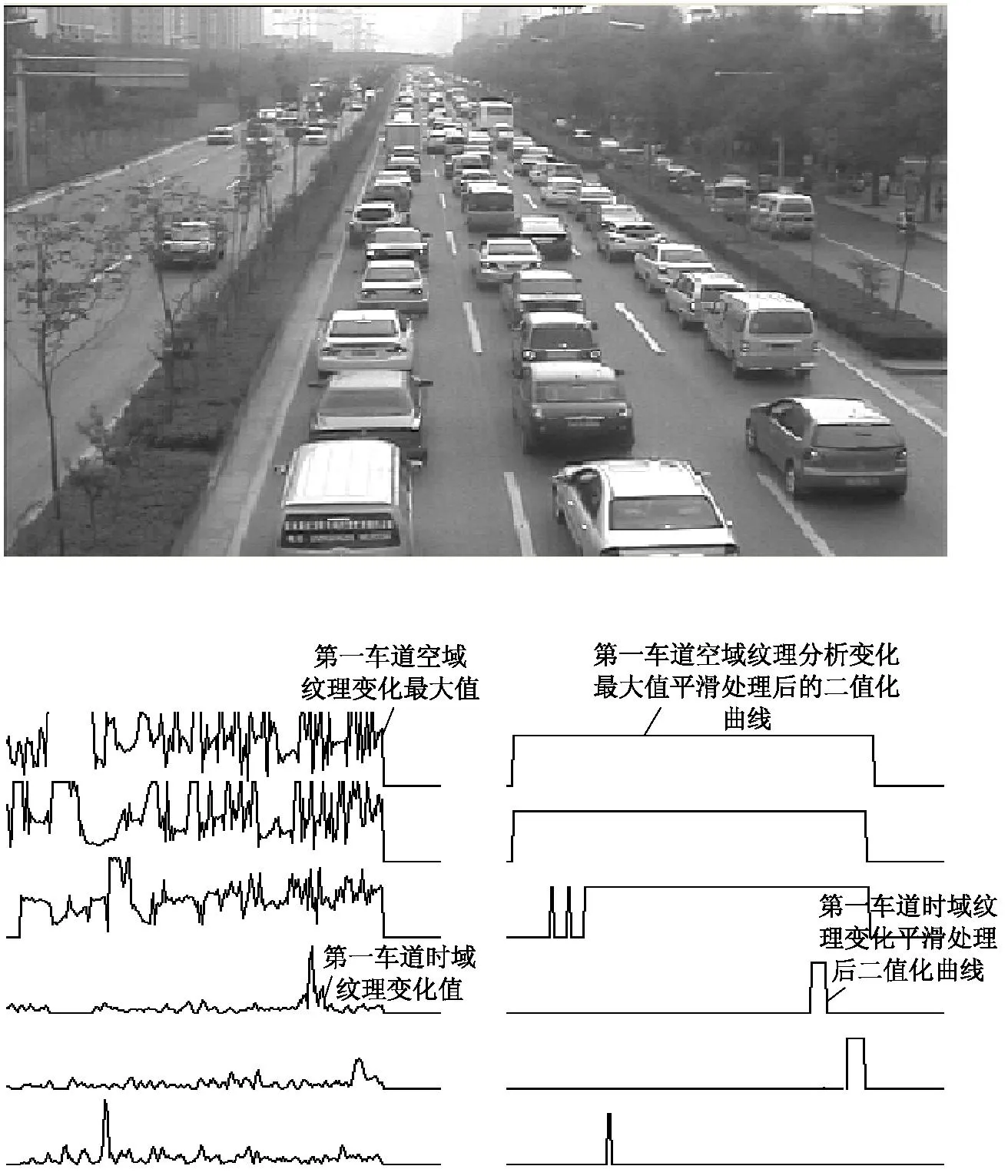
为验证上述算法的有效性,采用多组不同场景的实时监控视频进行试验,视频的采样频率是25帧/s。图像大小为720×288,将图像分成大小为8×6的90×48个块区域。将饱和状态和拥堵状态的参数做如下设置。
1) 饱和状态参数:空间占有率>50%,Ls>80 m,时间占有率与空间占有率的比值>90%,饱和状态持续为1 500帧。
2) 拥堵状态参数:空间占有率>80%,Ls>100 m,时间占有率与空间占有率的比值>90%,拥堵状态持续为3 000帧。
图4为不同场景下的实时视频图像和空域与时域的纹理变化曲线,由图4可知,当道路处于拥堵状态时,车辆分布密集,道路的空间和时间占有率都很大。试验结果与算法的预期效果一致,验证了该算法具有较高的准确性和实用性。
4结语
通过分析道路处于不同交通状态时的特征,提出一种基于图像纹理分析的道路交通拥堵检测算法。该方法综合分析视频图像的空域和时域纹理变化,实时检测道路交通拥堵状况。通过大量试验数据验证,该算法计算量小,延时时间少,能满足交通管理和交通诱导系统中的实际需要。
(b) 西安二环

(c) 西安二环夜间
参考文献:
[1]Dailey D J. Travel-Time Estimation Using Cross-Correlation Techniques[J]. Transportation Research Part B: Methodological,1993,27(2):97-107.
[2]姜桂艳. 道路交通状态判别技术与应用[M ]. 北京:人民交通出版社, 2004.
[3]Kerner B S. Three-Phase Traffic Theory and Highway Capacity[J].Physical A: Statistical Mechanics and ITS Applications,2004,333:397-440.
[4]何蜀燕,关伟.城市快速路交通流状态跃迁的实证分析[J].中国公路学报,2008,21(5):81-86.
[5]郑为中,史其信.基于贝叶斯组合模型的短期交通量预测研究[J].中国公路学报,2005,18(1):85-89.
[6]王曦,祝付玲.基于高斯混合分布的交通拥堵评价模型[J].公路交通科技,2011,28(2):127-131.
[7]Palubinskas, Gintautas,etal. Model Based Traffic Congestion Detection in Optical Remote Sensing Imagery[J]. European Transport Research Review.2010,6(2):85-92.
[8]姜桂艳,冮龙晖,王江锋.城市快速路交通拥挤识别方法[J].交通运输工程学报,2006,6(3):87-91.
[9]庄斌,杨晓光,李克平.道路交通拥挤事件判别准则与检测算法[J].中国公路学报.2006,19(3):82-86.
[10]Cucchiara R.Grana C, Piccardi M,etal. Detecting Moving Objects, Ghosts and Shadows in Video Streams [J]. IEEE Trans.on Pattern Analysis & Machine Intelligence(S0018-9340),2003,25(10):1337-1342.

Traffic Congestion Detection with Image Texture Analysis
YuanBin,ZhangYong
(China Shipping Network Technology Co.,Ltd,ShangHai 200135, China)
Abstract:Automatic traffic congestion detection is essential in traffic management and traffic guidance system. At present, the commonly-used traffic congestion detection method suffers from detection delay and intense computation. This paper presents an algorithm for traffic congestion detection based on image texture analysis, which analyses the change of image texture in space domain and time domain and calculates the space occupancy and time occupancy. The automatic congestion detection is achieved by synthesizing the variation of these parameters. Because the analysis is based on the traffic scene, it does not rely on traffic modeling and direct traffic parameter measurements, on which ordinary detection methods are based. Therefore, the traffic texture method performs better than common used methods in terms of detection delay and computing load. Tests are carried out to verify the performance of the method with real surveillance video.
Key words:traffic congestion detection; background updates; analysis of space domain texture; analysis of time domain texture
中图分类号:TN911.73;U491
文献标志码:A
文章编号:1674-5949(2015)04-077-05
作者简介:袁彬(1987—),女,黑龙江牡丹江人,工程师,主要研究视频图像处理。
收稿日期:2015-08-21