基于功率预测的Fuzzy-PID控制在光伏MPPT中的应用
2016-01-22 03:49王亚楠杨旭红
电力科学与工程 2015年11期
关键词:光伏发电
王亚楠,杨旭红
(上海电力学院 自动化工程学院,上海200090)
基于功率预测的Fuzzy-PID控制在光伏MPPT中的应用
王亚楠,杨旭红
(上海电力学院 自动化工程学院,上海200090)
摘要:模糊控制由于强智能性和针对强非线性系统的特征,在光伏发电MPPT中运用十分普遍。针对传统模糊控制算法的两方面的缺陷,即一方面传统模糊算法在响应速度与跟踪精度得不到兼顾;另一方面算法在光伏MPPT中也可能出现误判现象,提出一种将功率预测与模糊PID算法相结合的新型模糊控制器。最后通过在MATLAB/SIMULINK软件平台搭建基于Boost电路的光伏发电系统仿真模型,比较分析了传统模糊MPPT算法与提出方法在动态性能与静态性能两方面的仿真结果,从而验证了所提方法的可行性和实用性。
关键词:光伏发电; 最大功率点跟踪; 功率预测; 模糊PID控制
中图分类号:TM615
文献标识码:��码: A
DOI:10.3969/j.issn.1672-0792.2015.11.002
收稿日期:2015-09-30。
基金项目:上海市自然科学基金资助项目(13ZR1417800);上海市科技创新行动技术高新技术领域重点项目(14511101200);上海市电站自动化技术重点实验室开放(13DZ2273800);上海市重点科技攻关计划(14110500700)。
作者简介:王亚楠(1991-),男,硕士研究生,主要从事光伏微网运行控制的研究,E-mail:sandman1927@163.com。
Abstract:The fuzzy regulator boasts strong intelligence and the characteristic of dealing with strong nonlinear systems, rendering it widely used in MPPT of photovoltaic(PV) generation. However, there are two defects in the conventional fuzzy control. First, the conventional fuzzy control can hardly satisfy simultaneously the requirements in response speed and tracking accuracy. Second, the algorithm may lead to miscalculation in the MPPT of PV generation. Therefore, a new fuzzy regulator which combines power predication with fuzzy PID control was proposed in this paper. Finally, the simulation model of PV generation system of Boost circuit was built on MATLAB/SIMULINK platform. And comparisons of the conventional fuzzy MPPT and the proposed method in terms of both dynamic performance and static performance verify the feasiblity and practicability of the proposed method.
Keywords:PV generation; MPPT; power prediction; fuzzy-PID

0引言
太阳能光伏发电由于其具有可再生性、清洁性及取之不尽、用之不竭等特点,正在发展成为世界能源组成中的重要部分[1]。在太阳能光伏发电中,受光照强度、环境温度、负载等因数的影响,光伏电池的输出特性具有较强的非线性。当光伏电池工作在某一个特定的输出电压值时,其输出功率可以达到最大值。为了提高其工作效率,使光伏电池始终工作在最大功率点附近[2],就需要对最大功率点进行追踪,即最大功率追踪(Maximum Power Point Tracking,MPPT)。
传统的光伏发电MPPT方法有电导增量法[3](Incremental Conductance)、扰动观察法[4](Perturb and Observe Algorithms)、模糊逻辑控制法[5](Fuzzy Logic Control)等。其中,电导增量法和扰动观察法步长大小选取的矛盾使得这两种算法在跟踪精度和响应速度两方面得不到兼顾。相比之下,模糊逻辑控制法具有较明显的智能性[6],更适用于类似于光伏电池输出功率这样的强非线性系统。不过,当外部环境情况发生突变时,传统模糊逻辑控制法可能会出现误判现象[7]。针对传统模糊MPPT控制算法这一缺陷,本文提出一种基于功率预测的Fuzzy-PID新控制算法,该算法能在保证算法跟踪精度和响应速度的同时,当外部环境发生突变时,有效避免误判现象,显示出良好的动态性能。文章最后通过搭建基于Boost电路的光伏发电系统仿真模型,对比分析了新方法与传统模糊MPPT算法的稳态性能和动态性能,验证了本文所提基于功率预测的模糊PID控制算法的可行性。
1光伏电池特性
光伏电池的基本机理是半导体材料的光生伏特效应[8],等效电路模型如图1所示。
根据图1可以得出光伏电池的等效数学模型[9]为:

图1 光伏电池的等效电路
(1)
式中:I为光伏电池输出电流;Iph为短路电流;I0为无光照时二极管反向饱和电流;q为电荷常量,q=1.6×1019C;Uoc为光伏电池开路电压;A为二极管因子参数;K为玻尔兹曼常数,K=1.38×10-23J/K;T为光伏电池绝对温度;Rs为串联电阻;Rp为等效旁漏电阻。
根据式(1)的工程模型,本文在MATLAB/SIMULINK仿真软件平台搭建了光伏电池的仿真模型,并仿真得出光伏电池输出特性曲线如图2所示。为了更好的对光伏电池照度特性和温度特性进行定性分析,特设定了光照强度为1 000 W/m2和温度为25 ℃两个案列,分别如图2(a)、(b)所示。从图2可以得出结论:光伏电池输出功率随着光照强度的增加而增加,随着光伏电池板绝对温度的增加而减小[10]。
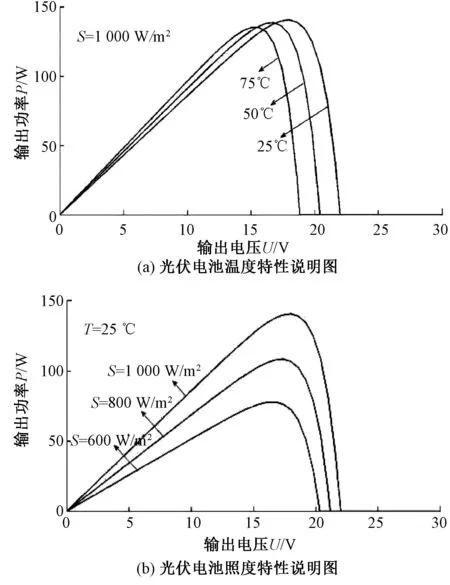
图2 光伏电池P-U特性曲线图
2功率预测原理
2.1 传统模糊MPPT控制中误判分析
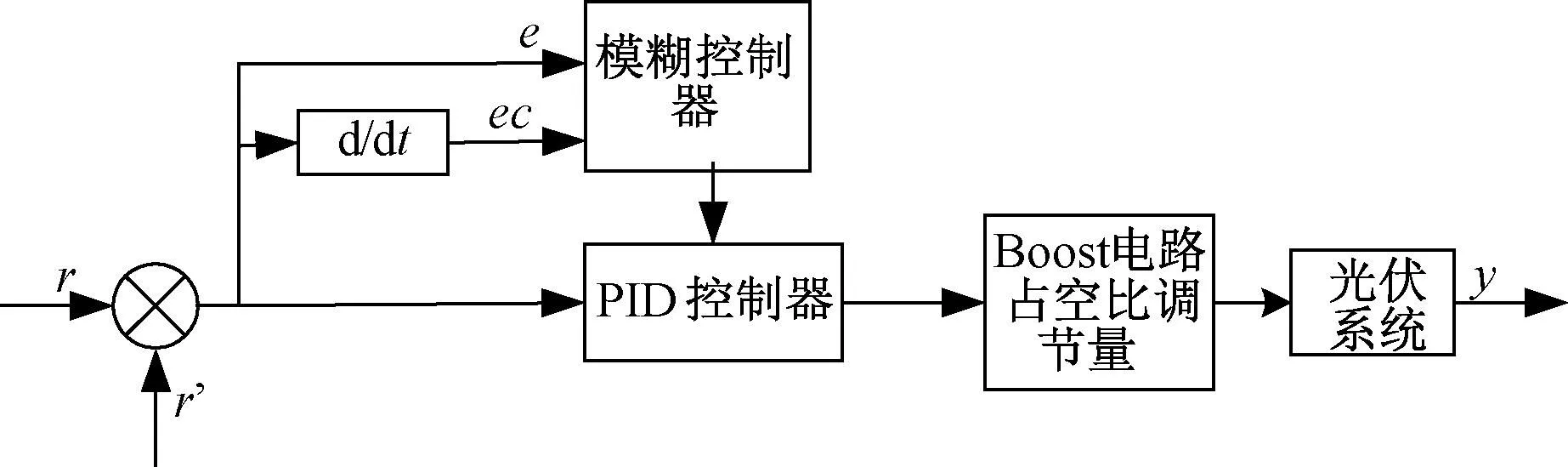
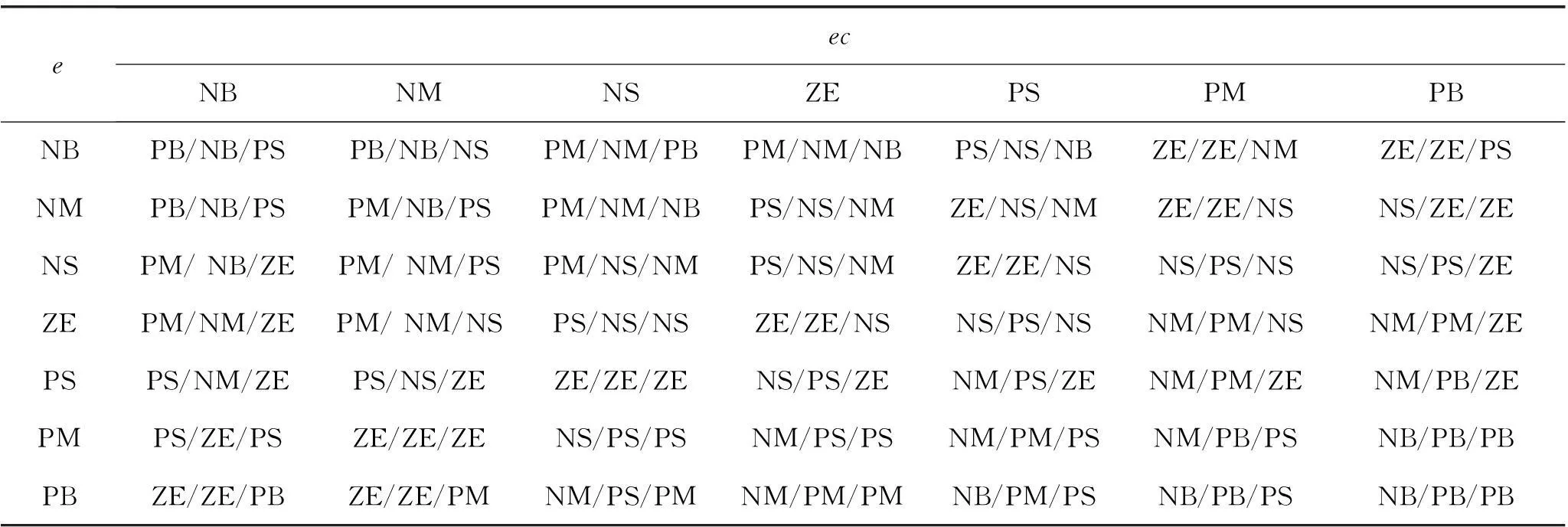
传统模糊MPPT控制器以光伏电池输出功率误差e和误差变化率ec经过归一模糊量化处理后作为模糊输入量,然后根据e和ec的变化情况来决定下一时刻扰动步长的大小与方向。但当外部情况突变时,传统模糊MPPT控制算法可能会出现误判现象。如图3中分析所示,当光伏电池工作在点a时,由于处于最大功率点的左侧,控制器给出一个正方向的步长ΔU,使得系统继续向最大功率点移动,假设下一时刻光伏电池输出电压工作应该为Ub。若外部环境没有发生变化,应该到达点b处;但可能由于光照强度减小等原因,光伏电池的输出特性曲线发生变化,最终落在点c处;这时可能就有Pc 图3 传统光伏MPPT算法误判现象分析图 为了解决上面分析可能出现的误判问题,需要得出环境改变后的同一曲线扰动前后的功率值。如图4所示,设在kT时刻,采样得到此时光伏电池的输出功率是P(k),工作电压为U(k),即工作在D点。若外部光照条件突然发生改变,导致下一个采样工作点到达A点,为防止误判现象的发生则必须预测出B点的功率值。功率预测的原理[12]是在采样后的半个工作周期时增加一次采样,得到半个采样周期后的输出功率为P(k+0.5)。在数学角度,若采样的频率足够快,可以近似认为短时间内外部环境变化导致的功率变化率是线性的,即相邻相同间隔的时间功率的增加是恒定的,有ΔP1≈ΔP2。根据上述原理,可以得到预测值公式: (2) 图4 功率预测原理图 3基于功率预测的Fuzzy-PID控制器的设计 PID算法具有简单、稳定和可靠性高等优点,在太阳能MPPT控制中应用广泛。但其不具有参数在线优化功能,使得在处理类似光伏电池这类强非线性系统时略显不足。模糊控制由于其智能性和针对强非线性系统的特征,在光伏发电MPPT控制中被广泛使用。传统模糊控制以功率误差和误差的变化率作为模糊输入量,上文已经分析过传统模糊控制算法可能会引起误判。另外,传统模糊没有积分反馈环节,属于有差控制,在到达最大功率点附近后,会形成较大的振荡,形成一定的功率浪费,影响发电的效率[13]。综上,将模糊控制和常规PID控制相结合的模糊PID控制在光伏MPPT中有广泛的应用。本文设计的控制器是将功率预测和模糊PID算法相结合,以实时功率与预测功率的差值作为输入量,有效避免误判现象的发生;模糊PID控制算法则很好地兼顾了跟踪精度与响应速度,其基本原理如图5所示。其中: (3) 本文设计的控制器两个输入量e、ec,三个输出量Kp、Ki、Kd均具有7个模糊子集,分别为{NB,NM,NS,ZE,PS,PM,PB},并规定它们具有相同的论域为{-3,-2,-1,0,1,2,3}。根据系统的特点与要求,输入量和输出量均设定为三角形隶属函数。另外,模糊控制规则是整个模糊控制器中最重要的部分,直接决定追踪任务的完成与否。根据经验与理论的分析,本文的参数整定大致遵循下面三条规则[6]: 图5 光伏发电系统模糊PID控制器原理框图 (1)当|e|的值偏大时,说明距最大功率点较远,为加快算法的响应速度,Kp的值应设的较大;为防止开始时偏值过大,Kd的值应当较小;为防止系统积分饱和,Ki的值应当设置的较小。 (2)当|e|和|ec|的值均处于中等大小时,Kp的值和Kd的取值都应当较小;而Ki的值应当设置适当即可。 (3)当|e|的值偏小时,此时应当保证系统的稳态性能,顾Kp的值和Ki的值应当较小。而Kd的值得根据|ec|的值分三种情况而定,具体如下:当|ec|的值相对较大时,Kd的值应当较小;当|ec|的值相对较小时,Kd的值则相应较大;否则,Kd的值设定为中等大小即可。 根据上述规则,本文制定模糊PID控制器的规则如表1所示。 表1 模糊控制器规则表 4仿真分析 为了说明上文中所提的算法的实用性,本文在MATLAB/SIMULINK平台搭建了基于Boost电路的光伏发电系统的仿真平台。如图6所示,通过调整PWM波形的占空比的大小来控制晶闸管的开断时间,从而达到控制光伏发电系统工作电压的目的。图6所搭建的系统仿真模型的一些主要参数说明如下,光伏电池方面:开路电压设定为22 V,短路电流设定为8.58 A;Boost电路方面:电容C的值为300 e-6 F,CF值为500 e-6 F,电感L值为1 e-3 H;PWM模块方面三角波设定为[-0.5,0.5];另外仿真均采用ode45算法[10]。 图6 光伏发电系统仿真模型 为了说明本文提出基于功率预测的新型模糊PID控制器的控制效果,本文选取传统模糊控制算法与之结果相比较分析。仿真均设定在标准测试温度为25 ℃,照度为1 000 W/m2下进行,最大功率点处工作电压约为17.7 V,工作电流约为7.94 A,故最大功率为140.5 W左右。当系统追踪到最大功率点稳定后,为了更好地比较两种方法的动态性能,分析它们对突变情况的应对能力,特在仿真0.2 s时将仿真环境光照强度突降至800 W/m2。两种方法的仿真结果图分别如图7、图8所示。为方便分析,特将稳定后与突变后的功率情况通过小图放大,如图7、图8中小图所示。两种方法的稳态性能和动态性能分析总结如下。 图7 传统模糊控制算法仿真结果图 图8 结合功率预测的Fuzzy-PID算法仿真结果图 稳态性能方面:首先,两种方法均成功追踪到最大功率点,在140 W上下波动,验证了所用两种方法均是有效的。传统模糊控制算法从开始追踪到稳定所花时间大约为0.03 s;稳定后波动幅度为139.6~140.6 W,即1 W。本文所提基于功率预测的模糊PID算法从开始追踪到稳定所花时间大约为0.01 s;稳定后波动的幅度为140~140.5 W,即0.5 W。 动态性能方面:同样,0.2 s突变后两种方法均重新追踪到了新的最大功率点,在108 W处上下波动。传统模糊控制算法大约在0.218 s重新追踪到新最大功率点;稳定后波动幅度为107.5~108.6 W,即1.1 W。本文所提基于功率预测的模糊PID算法大约在0.204 s即又重新追踪到新最大功率点;稳定后波动幅度为108~108.5 W,即0.5 W。 从上述对稳态性能和动态性能的分析来看,本文所提方法在追踪精度与响应速度方面均表现更好,特别是在应对外部环境突变情况时,能有效地避免误判情况的发生并及时地追踪到新的最大功率点。 5结论 本文主要分析了传统光伏MPPT算法在追踪时可能出现误判现象的原因,提出一种将功率预测与模糊PID控制器相结合的新型控制策略。理论分析了所提方法的原理,并在MATLAB/SIMULINK软件平台上搭建了基于Boost电路的光伏发电仿真模型。通过与传统模糊MPPT控制算法仿真结果中稳态性能与动态性能两方面的比较,验证了新方法的可行性。文章较好地模拟了实际光伏发电系统情景,但仅限于仿真平台模拟,并没有取得实验性的论证。 参考文献: [1]赵争鸣, 陈剑, 孙晓瑛. 太阳能光伏发电最大功率点跟踪技术[M]. 北京:电子工业出版社, 2012. [2]王军成, 杨旭红, 王严龙. 改进自适应变步长光伏系统最大功率跟踪[J]. 现代电力, 2014,31(5): 70-73. [3]张翔, 王时胜, 余运俊, 等. 基于电导增量法 MPPT 仿真研究[J]. 科技广场, 2013, (2): 60-64. [4]刘邦银, 段善旭, 刘飞, 等. 基于改进扰动观察法的光伏阵列最大功率点跟踪[J]. 电工技术学报, 2009, 24(6): 91-94. [5]林虹江, 周步祥, 冉伊,等. 基于遗传优化 BP 神经网络算法的光伏系统最大功率点跟踪研究[J]. 电测与仪表, 2015, 52(5):35-40. [6]陈丽, 韩辉. 基于模糊 PID 控制 MPPT 在光伏系统中的仿真研究[J]. 电子设计工程, 2013, 21(2): 67-70. [7]徐锋, 郑向军, 徐钰. 电流预测的电导增量法在光伏 MPPT 中的应用[J]. 自动化仪表, 2014, 35(6): 31-34. [8]Li X P, Shi Q J, Jiang Q Y.Application of double fuzzy control in MPPT of grid-connected photovoltaic generation system[J].Electric Power Automation Equipment,2012,32(8):113-116. [9]李金, 任稷林, 祁承超, 等.一种改进的太阳能电池MPPT技术[J].通信电源技术, 2012, 29(4): 13-15. [10]王亚楠, 杨旭红, 王军成, 等. 一种新型变步长光伏最大功率点跟踪控制策略[J]. 电气传动, 2015, 45(1): 54-57. [11]刘增环, 李洁. 基于功率预测的变步长扰动观测法在光伏 MPPT 中的应用[J]. 制造业自动化, 2015, 37(4): 2-5. [12]徐锋. 基于模糊控制和功率预测的变步长扰动观察法在光伏发电系统 MPPT 控制中的应用[J]. 计算机测量与控制, 2014, 22(2): 414-416,430. [13]黄克亚. 模糊 PID 控制在光伏发电 MPPT 中的应用[J]. 计算机仿真, 2013, 30(3): 134-137. The Application of Fuzzy-PID Control Method Based on Power Prediction in Photovoltaic MPPT Wang Yanan, Yang Xuhong(Automatic Engineering of Shanghai University of Electric Power, Shanghai 200090,China)
2.2 功率预测防误判原理







猜你喜欢
科技传播(2016年16期)2017-01-03
中国科技纵横(2016年20期)2016-12-28
中国绿色画报(2016年7期)2016-12-26
中国绿色画报(2016年7期)2016-12-26
中国绿色画报(2016年7期)2016-12-26
电子技术与软件工程(2016年20期)2016-12-21
商情(2016年40期)2016-11-28
中国市场(2016年41期)2016-11-28
时代金融(2016年27期)2016-11-25