基于颜色和边缘信息融合的车牌定位方法
2016-01-22 08:52薛凌云朱志强
杭州电子科技大学学报(自然科学版) 2015年6期
关键词:边缘检测
薛凌云,朱志强
(1.杭州电子科技大学生命信息与仪器工程学院,浙江 杭州 310018;
2.杭州电子科技大学自动化学院,浙江 杭州 310018)
基于颜色和边缘信息融合的车牌定位方法
薛凌云1,朱志强2
(1.杭州电子科技大学生命信息与仪器工程学院,浙江 杭州 310018;
2.杭州电子科技大学自动化学院,浙江 杭州 310018)
摘要:针对目前车牌定位方法的不足,提出了一种颜色和边缘信息相结合的车牌定位方法。首先根据HSV模型确定车牌底色区域,然后将其与基于边缘检测方法获取的候选车牌区域进行融合,最后通过连通域分析及伪区域去除得到精确定位的车牌。仿真结果表明,定位准确率超过96%,鲁棒性较好,运算速度较快。
关键词:车牌定位;颜色信息;边缘检测;数学形态学;连通域分析
0引言
为解决日益严重的交通拥堵等问题,智能交通系统应运而生,车牌识别技术作为其关键技术之一,广泛用于车辆管理、违章监控等领域。车牌识别通常包括车牌定位、字符分割和字符识别三个环节,车牌定位是识别的基础,定位精度直接影响识别性能。常用的车牌定位方法有基于边缘检测[1-2]、基于数学形态学[3-4]、基于纹理特征[5-6]、基于图像彩色信息等方法[7-8]。基于边缘检测方法受制于边缘清晰度;基于数学形态学方法难以独立使用;基于纹理特征方法易受相似特征区域干扰而产生定位困难;基于颜色方法易受光照变化及车身颜色影响而导致定位失败。通过分析车牌特征,本文提出一种颜色和边缘信息相融合的车牌定位方法:利用HSV模型提取车牌底色区域,再通过灰度化、边缘提取及数学形态学处理,初定位车牌区域,然后将两种处理结果融合并去除伪车牌区域,从而实现车牌精确定位。
1基于颜色信息的车牌定位
1.1 颜色空间转换
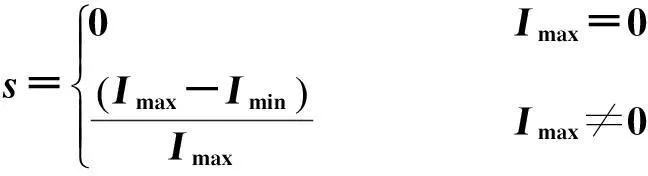
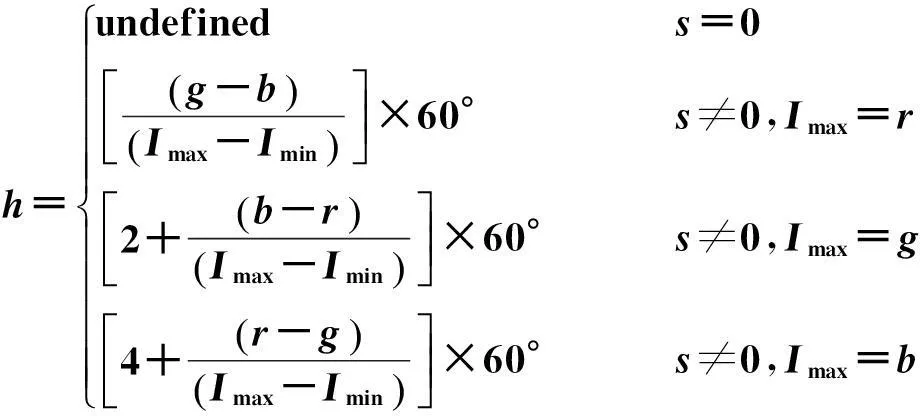
RGB模型易受光照影响,因此文本采用HSV模型,其转换关系如下[9]:
(1)
(2)
v=Imax
(3)
式中,Imax=max{r,g,b},Imin=min{r,g,b},r,g,b和h,s,v为模型分量。
1.2 确定车牌底色区域
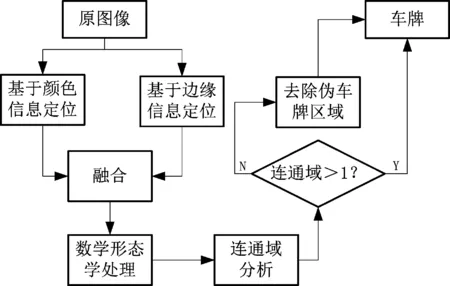
本文以蓝底白字车牌为例,4种颜色HSV分量范围如表1所示[10-11]。将满足(180 表1 4种颜色HSV分量范围 2基于边缘信息的车牌定位 对RGB车牌图像进行灰度化、边缘检测、二值化和数学形态学处理后,得到若干候选车牌区域。 1)灰度化 彩色图像灰度化方法如下: y=0.299r+0.584g+0.117b (4) 式中,r,g,b是RGB模型分量。 2)边缘检测与二值化 鉴于车牌字符与背景对比度大,本文采用对边缘敏感的Sobel算子进行边缘检测,采用Otsu算法进行二值化。Sobel算子的卷积核如下式所示[12],取两个卷积中的最大值作为该像素点的输出值。 (5) 3)数学形态学处理 通常,由于环境光照条件的制约,导致基于边缘检测和图像分割后预期的连通车牌区域事实上并未连通,因此进一步进行膨胀、腐蚀处理,如下式所示[13]。 (6) AΘB={x|(B)x⊆A} (7) A°B=(AΘB)⊕B (8) A·B=(A⊕B)ΘB (9) 根据文献[14]自适应结构元素设计原理及多次实验对比,本文选用结构元素se1=ones(9,18)做闭运算,填充细小空洞、连接邻近区域,选用结构元素se2=ones(9,9)进行两次开运算,消除“孤岛”,以获得完整连通域。 3基于颜色和边缘信息融合的车牌定位方法设计 仅基于颜色或边缘信息难以准确定位车牌,因而设计融合定位方法,流程如图1所示。 图1 车牌定位算法流程图 首先,将基于颜色信息的定位结果与基于边缘信息的定位结果进行融合,如下所示: andPic(i,j)=Sblue(i,j)&Comps(i,j) (10) 式中,Sblue(i,j)为基于颜色信息的定位结果,Comps(i,j)为基于边缘信息的定位结果。 再对融合结果做连通域分析,采用solidity判断连通域可靠程度,如下所示: solidity=Area/ConvexArea (11) 式中,Area为连通域面积,ConvexArea为连通域的最小凸多边形的面积。测试结果表明,可将solidity小于0.9的连通域判定为背景。 这样得到的车牌区域还存在伪区域。 常用于去除伪区域的特征是车牌区域的宽高比、面积等,但阈值较难确定。本文利用车牌区域边缘丰富这一特征,将边缘图像与连通域进行融合,逐行统计连通域灰度跳变次数。仿真测试结果表明,满足灰度跳变次数小于8或跳变次数大于8但是连续行数小于5的区域,可以界定为伪区域。 4实验结果与分析 实验选取了不同背景及光照条件下的97张车牌图片进行仿真,车牌定位准确率为96.875%。部分实验结果如图2和图3所示。其中,图2(a)是基于颜色的车牌定位结果,由于背景颜色干扰,获得的车牌底色区域过大,不便于在此基础上直接定位出车牌区域。图2(b)是基于边缘检测的车牌定位结果,图中存在几何特征相近的连通域,同时,数学形态学处理会使可能的车牌区域并入邻近连通域,从而增加精确定位出车牌的难度。本文将两种定位结果进行融合,成功去除了大量伪车牌区域,再对融合结果进行连通域分析,可以准确定位出车牌区域。由图3可见,本文的车牌定位方法在不同的光照条件、车牌倾斜、灰尘、复杂背景等情况都能较好实现定位,具有较好的鲁棒性。 图2 背景颜色干扰的车牌定位 图3 不同条件下的车牌定位 5结束语 本文提出一种基于颜色和边缘信息融合的车牌定位方法。在提取车牌位置信息时,利用车牌的颜色和边缘信息初步定位,再将两种定位信息融合后获取车牌区域,最后经连通域分析和伪区域甄别,完成车牌精确定位。本方法克服了基于颜色信息的车牌定位方法易受背景色干扰和基于边缘信息的车牌定位方法会产生过多的候选车牌区域的不足,在不同外部条件下都能较好地定位出车牌,具有较好的鲁棒性和运算速度。 参考文献 [1]曾丽华,李超,熊璋.基于边缘与颜色信息的车牌精确定位算法[J].北京航空航天大学学报,2007,33(9):1112-1116. [2]刘濛,吴成东,樊玉泉,等.复杂背景图像中的车牌定位算法[J].中国图象图形学报,2010,15(9):1357-1362. [3]李刚,曾锐利,林凌,等.基于数学形态学的车牌定位算法[J].仪器仪表学报,2007,28(7):1323-1327. [4]卢雅琴,邬凌超.基于数学形态学的车牌定位方法[J].计算机工程,2005,31(3):224-225. [5]刘广起,郑晓势,张晓波.基于图像纹理特征提取的车牌定位算法[J].中国图象图形学报,2005,10(11):1419-1422. [6]黄艳国,赵书玲,许伦辉.基于纹理特征和颜色匹配的车牌定位方法[J].微电子学与计算机,2011,28(9):123-126. [7]李文举,梁德群,张旗,等.基于边缘颜色对的车牌定位新方法[J].计算机学报,2004,27(2):204-208. [8]沈勇武,章专.基于特征颜色边缘检测的车牌定位方法[J].仪器仪表学报,2008,29(12):2673-2677. [9]郭捷,施鹏飞.基于颜色和纹理分析的车牌定位方法[J].中国图象图形学报:A辑,2002,7(5):472-476. [10]张丽静,孙杰,殷晓宇.基于HSV颜色空间的车牌定位方法[J].微计算机信息,2008,24(7):247-248. [11]李刚,黄席樾,刘政,等.基于字符边缘颜色多分量信息的车牌定位方法[J].计算机工程,2009,35(18):176-178. [12]邢军.基于Sobel算子数字图像的边缘检测[J].微机发展,2005,15(9):48-49. [13]郭航宇,景晓军,尚勇.基于小波变换和数学形态学的车牌定位方法研究[J].计算机技术与发展,2010,20(5):13-16. [14]方兴林.一种基于自适应形态学结构元素的车牌定位算法[J].计算机工程与应用,2013,49(23):149-152. License Plate Locating Method Based on Color and Edge Information Xue Lingyun1,Zhu Zhiqiang2 (1.SchoolofLifeInformationandInstrumentEngineering,HangzhouDianziUniversity,HangzhouZhejiang310018,China; 2.SchoolofAutomation,HangzhouDianziUniversity,HangzhouZhejiang310018,China) Abstract:In view of disadvantage of existing locating algorithms,a plate location method based on the color and edge information is proposed.Firstly,the background region of the plate is found according to HSV model,and then this region is fused with candidate license plate regions which are detected by edge detection and mathematical morphology finally,the precise license plate is obtained through analyzing the connected domain.The experiment results show that the accuracy rate of the method is more than 96%,and it has a good robustness and speed. Key words:license plate location;color information;edge detection;mathematical morphology;connected domain analysis 中图分类号:TP391 文献标识码:A 文章编号:1001-9146(2015)06-0014-04 作者简介:薛凌云(1967-),女,内蒙古呼和浩特人,教授,检测技术与自动化装置. 收稿日期:2014-10-20 DOI:10.13954/j.cnki.hdu.2015.06.003




猜你喜欢
山东工业技术(2016年24期)2017-01-12
计算技术与自动化(2016年4期)2017-01-11
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年23期)2016-11-02
科教导刊·电子版(2016年18期)2016-07-18
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年9期)2016-04-26
科技视界(2016年3期)2016-02-26