基于海杂波特性的主动声呐检测前跟踪技术研究
2016-01-20 13:43:07王南孙旭海军驻杭州地区军事代表室杭州3003第七一五研究所杭州3003
声学与电子工程 2015年1期
王南孙旭(.海军驻杭州地区军事代表室,杭州,3003;.第七一五研究所,杭州,3003)
基于海杂波特性的主动声呐检测前跟踪技术研究
王南1孙旭2
(1.海军驻杭州地区军事代表室,杭州,310023;2.第七一五研究所,杭州,310023)
摘要根据目标与虚警在时域、空域和回波能量上所表现出的不同特性,提出了基于海杂波特性的主动声呐检测前跟踪算法,以建立运动目标的起始航迹。利用空域邻域聚类的亮点预处理和基于LRDT的目标检测与航迹提取的两步处理,较大程度的抑制虚警、提高检测概率并生成初始目标航迹。
关键词空域邻域聚类;时域连续性;检测前跟踪;航迹起始
主动声呐与目标之间的距离较远时,目标回波能量较弱,且淹没在各种杂波背景和强噪音中,使得操作人员难以判定疑似目标。同时,就水声目标检测与跟踪的整个过程而言,需要在维持跟踪之前,提取运动目标的各种有效信息生成目标初始航迹[1]。在传统航迹起始的处理上,通常有两种方法。一种是人工判定疑似目标并引导声呐设备实施跟踪;另一种是M/N逻辑法,即在连续的N次扫描中,如果疑似目标出现M次以上,则认为是目标航迹,否则认为是虚警[2]。前一种方法增加了操作人员的工作负担;后一种方法未能直接反映出目标初始航迹与信噪比之间的关系,对不同性噪比的目标需要固定的N帧数才能确定目标/虚警航迹,导致信噪比高的目标起始速度过慢、而信噪比低的目标航迹质量较差。针对上述两种方法的不足,2004年,Lawrence D Stone给出了似然比检测与跟踪(LRDT)方法[3],该方法将目标的检测与跟踪处理综合为一个过程,使得目标的检测以及航迹提取过程可以同时实现。LRDT是检测前跟踪(TBD)的最初实现技术,该技术已成功用于美国海军水下监视系统Spotlight ATD。当前,TBD技术的研究主要沿着动态规划检测前跟踪(DP-TBD)和粒子滤波检测前跟踪(PF-TBD)两个方向进行发展。2007年,Buzzi提出DP-TBD多目标跟踪算法,解决了DP-TBD算法进行多目标跟踪时出现的维数灾难和计算量爆炸等问题。PF-TBD算法最早由Salmond、Boers在2001年提出[4],2012年Kreucer将其应用于雷达声呐探测领域。
本文提出了一种基于海杂波特性的主动声呐检测前跟踪技术,通过空域邻域聚类的亮点预处理和基于LRDT的目标检测与航迹提取的两步处理,较大程度降低了主动声呐的检测虚警率,同时生成多目标的初始航迹,实现了跟踪的智能化。
1 主动声呐目标与虚警的差异性
1.1空域邻域聚类
在复杂海洋环境下,主动声呐接收的目标信号往往淹没在噪声或混响中。先验位置信息未知的目标因众多回波亮点的干扰而确认困难。本文根据物理成因的不同,将主动声呐接收到的信号分为两类:一类是来自目标或类目标的反射回波信号,另一类是噪音信号。其中,反射回波与发射信号的相关性较高,经匹配滤波处理后,亮点邻域的能量集中程度大幅提高,而噪音与发射信号却是不相关的,匹配滤波后亮点邻域的能量集中程度仍保持不变。
为了直观说明和验证本文理论和算法的有效性,选取了某课题采集的实际主动声呐的海试数据进行分析和处理。试验中,协作目标绕本船作弧线运动、距离为5 km左右、弱负梯度水文,常规信号处理后,目标的信噪比在15 dB附近波动,偶尔会出现低于检测域(8 dB)的情况。图1中的左上角显示的是连续四帧的亮点位置,参试人员记录的目标、类目标干扰、噪音亮点的位置标记如图1(a)所示。将标记亮点所在波束的局部数据放大,如图1 (b)、(c)、(d)所示,目标与噪声的差异显著。由此,本文提出了一种利用目标与噪音在匹配滤波后的波形差异来实现抑制杂波的方法,即基于空域邻域聚类的亮点预处理技术。
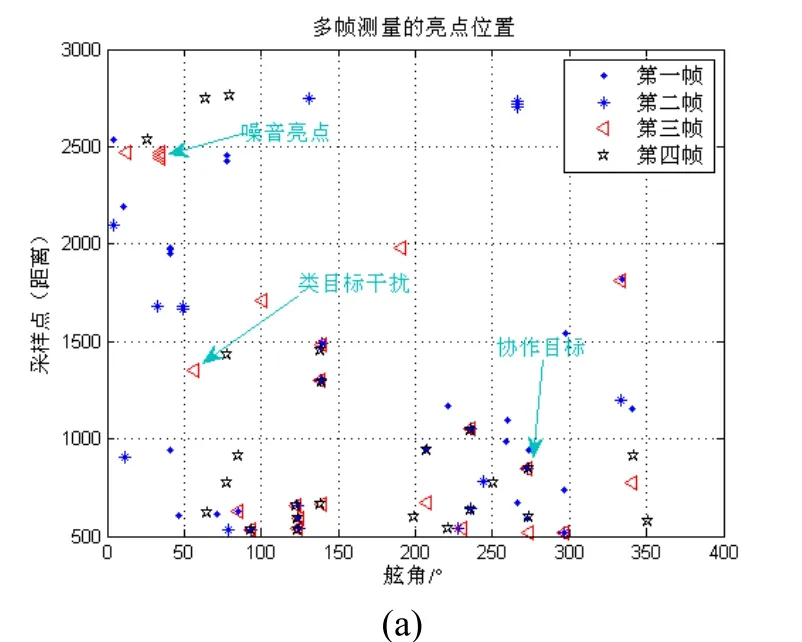
图1 匹配滤波后,目标、类目标、噪音的波形图
1.2时域连续性
由鱼群、航船以及海底、海面反射等引起的类目标干扰在经匹配滤波处理后的能量集中程度也较高,在波形上区分这类虚警困难。由此,本文进一步研究利用多帧数据中目标的轨迹连续性方法实施杂波抑制。
通常,水声目标的运动速度相对较为缓慢,在连续多帧的数据中,其运动轨迹是连续的。目标运动的时域连续性决定了下一时刻的目标亮点会以极大概率出现在预测目标点邻近区域;而虚警作为随机信号,其在时域上表现出很大的随机性,即虚警在连续几个采样时刻内出现在预测目标点邻近区域的概率很小。图2为连续四帧的匹配滤波处理后的探测画面,图中黄色框选的37号波束、采样点为6 000附近均有亮点,直观的显示了目标的时域连续性。

图2 连续四帧数据表现出的目标时域连续性
1.3能量分布规律
针对传统利用M/N逻辑的多目标航迹起始方法存在的高信噪比目标确认速度较慢导致的最佳武器使用时机的散失问题,研究了海杂波以及目标回波能量的分布规律,同时将该分布规律与时域连续性相结合提出了基于LRDT的目标检测与航迹提取技术。
本文这里直接给出了杂波能量(SNR,dB)的概率密度函数:

以及目标回波能量(SNR,dB)的概率密度函数
2 算法设计
2.1基于空域邻域聚类的亮点预处理技术
基于空域邻域聚类的亮点预处理技术亦可被称为杂波抑制技术,即通过对数据的预处理操作,抑制由噪声引起的杂波干扰,从而降低后续处理的虚警率。
2.1.1 空域邻域聚类
受发射信号以及海洋信道相关损失的影响,接收信号处理后的时延分辨力和频移分辨力不会很高,即亮点所在区域不会是一到几个接触点,而往往是一团信噪比较大的点,我们将此称为一个聚类。聚类是研究亮点空域邻域特性的基础,首先提取主动声呐探测区内的亮点聚类。
由于未经检测门限处理的数据量较大,目标和虚警个数先验未知,传统基于划分、层次的聚类方法难以实施。针对这一问题,本文提出一种峰值提取后的搜索聚类算法,流程见图3。
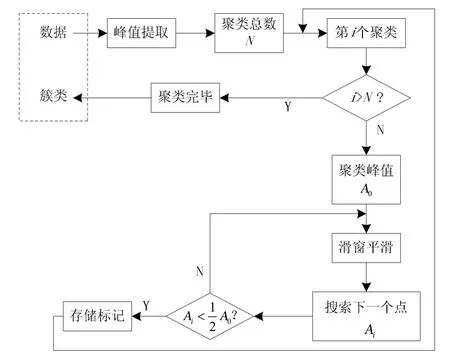
图3 空域邻域聚类算法流程
搜索终止条件由下式确定,即当搜索到一个点的幅值Ai小于聚类峰值A0的一半时终止搜索。

为了不使信号周期导致幅值波动对算法噪声影响,考虑采用一个长度为M的窗进行滑窗平滑,M的数值由下式确定。

式中,非fs为采样频率,f0为信号中心频率。
2.1.2 显著性噪声识别与抑制
在复杂的海洋环境中引起主动声呐目标检测的高虚警问题的原因是多样的,总的来说,可以将这些虚警归为两类:噪声和类目标干扰。由于两类虚警产生机理的不同,它们各自的聚簇在形状上存在着较大差异。直观看来,噪声数据簇变化比较平缓,集中程度低,而类目标和目标数据簇的集中程度则相对较高。
贝叶斯分类方法为解决这类问题提供了一个理论基础。记x=[x1, x2, L ,xl]T是一个用特征向量表示的未知样本,w1, w2,L , wM是预先已知的M个类,则形成了M个条件概率P(wi|x)表示x∈wi的概率。
对于两个类w1、w2的情况,贝叶斯分类规则可以描述为:若P(w1|x)> P (w2|x),则x∈w1;若P(w1|x)< P (w2|x),则x∈w2。当特征向量x服从正态分布时,wi类的条件概率表达式如下:
其中,ui为均值,Σi为协方差矩阵。
定义:

上式化简后:

按贝叶斯分类原理,可以得出利用波形特征进行分类的表达式如下:

其中,X特征向量,MB为噪声的特征向量,MT为目标的特征向量,PB为噪声的特征协方差矩阵,TP为目标的特征协方差矩阵。
贝叶斯分类方法的一个重要工作是设计合理有效的特征向量并确定相应的特征协方差矩阵,这在实际中是困难的。本文注意到反射回波信号与发射信号相关,匹配滤波后数据集中,聚类内的数据点个数少;而噪声与发射信号不相关,聚类内的数据点个数则比较多。由此,提出了一种利用聚类内的数据点个数识别显著性噪声的方法。
统计各聚类内的数据点个数N,当N满足下式时,则判定该亮点簇为噪声。

其中,K为常数系数,τρ为发射信号的时延分辨力,fs为采样频率。
对短脉冲噪声,聚类内的数据点个数也比较少,这一方法尚不能有效区分,但可通过后续论述的时域连续性方法进行抑制。
2.1.3 实际数据处理效果
为了验证算法杂波抑制效果,选取上文的连续四帧数据进行处理。处理前后的效果如图4所示,图中蓝色亮点是被抑制的显著性噪声,红色亮点为保留下来的可疑点,表1为统计效果。从中可以看出,该方法可以降低10%到30%虚警率。
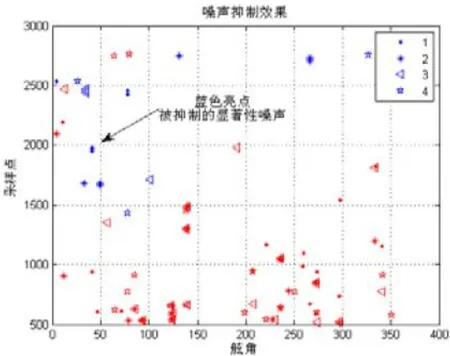
图4 显著性噪声识别与抑制的效果

表1 降虚警效果统计
2.2基于LRDT的目标检测与航迹提取技术
由于空域邻域聚类方法缺乏对类目标干扰和短脉冲噪声的抑制能力,其处理后的杂波干扰依然很高;另一方面,人工参与的目标跟踪方法往往使操作人员过于疲劳。于是,本文提出了基于LRDT的目标检测与航迹提取技术。
2.2.1数据关联与跟踪滤波
复杂海洋环境下,主动声呐目标检测不仅包含大量的虚警,而且可能存在目标失序量测以及测量误差偏大等多种情况。导致点迹关联涉及到关联杂波、目标断续、虚假起始等多种问题,如图5;轨迹关联涉及到轨迹汇合、轨迹分支、轨迹断续等问题,如图6。
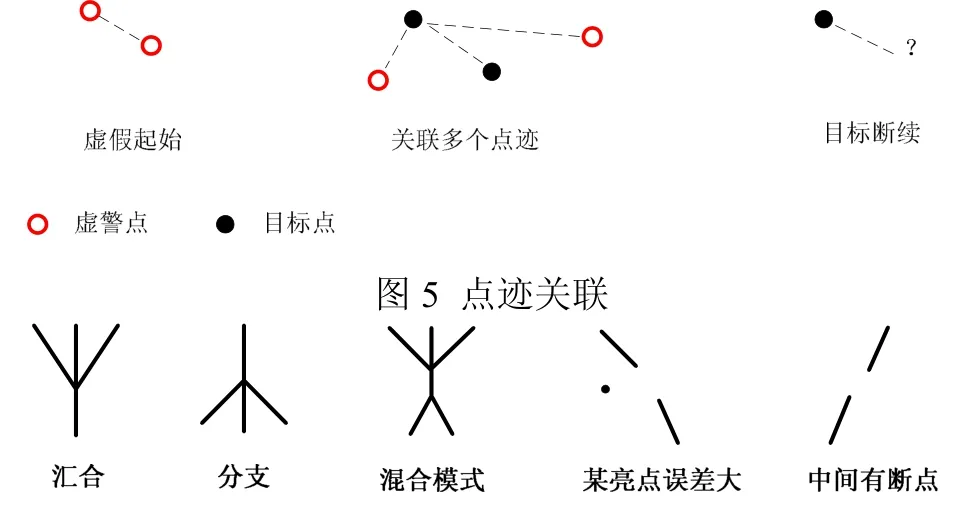
图6 轨迹关联
因此,高虚警下主动声呐检测目标和航迹提取的复杂性和难度很大。常规的最近邻(NN)关联方法效果较差,容易出现错误互联而导致目标跟丢的情况。本文采用多假设跟踪(MHT)方法进行数据关联,有效的解决了在密集杂波、量测断续等复杂环境下的多目标跟踪问题。同时针对常规Kalman滤波对于非匀速目标出现的跟踪精度降低、甚至是滤波发射问题,研究利用延迟机动检测的自适应跟踪滤波方法,以兼顾匀速和机动两种运动方式下的目标跟踪。
2.2.2 序列似然比计算
本文提出的基于LRDT的目标检测与航迹提取技术在利用目标时域连续性的同时还利用了回波能量统计特性。这一处理方法有效克服了常规M/N逻辑方法对于强目标确认时间过长的不足,通过序列似然比计算和判定同时完成目标检测与航迹提取。
记H0表示虚警,H1表示目标,累积到第k帧时刻的序列似然比如下:

其中,f(xiH1)、f(xiH0)分别表示目标和虚警的概率密度函数,具体如式(1)和式(2)所示。
判定门限依据修正N-P准则确定,即在已知系统虚警概率α和漏报概率β的条件下确定似然比门限。
2.2.3 算法流程
基于LRDT的目标检测与航迹提取技术的算法实现较为复杂,本文给出简要的算法流程如图7所示。图中LLR表示检测序列的累积似然比,L_up表示检测上限,L_down表示检测下限,DID_1表示当前帧亮点生成的检测序列,DID_2表示上一时刻的检测序列与当前帧数据关联更新的序列,DID为两类检测序列的合集(去沉余),Target_1表示直接可确认的强目标,Target_2表现经累积检验确认的(小弱)目标航迹。
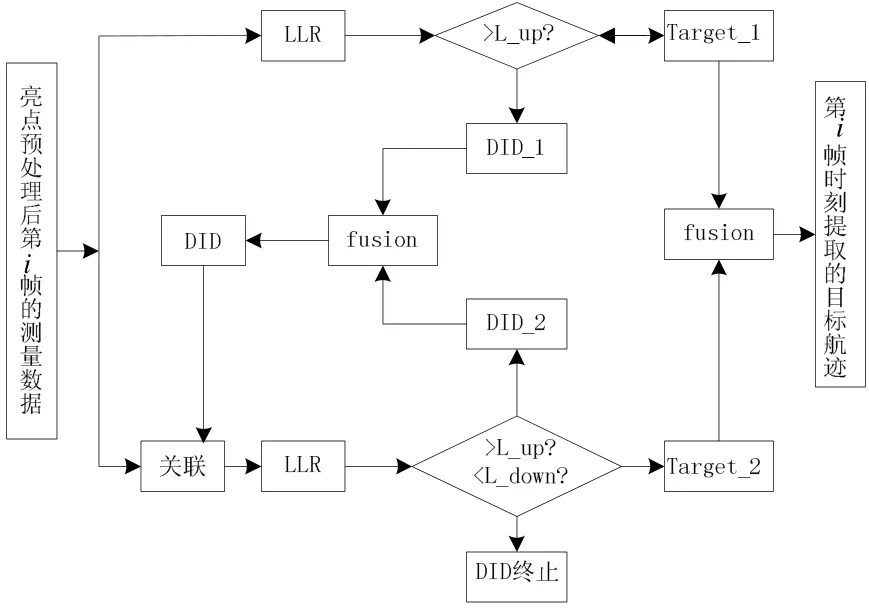
图7 多目标航迹自动起始流程
2.2.4 实际数据处理效果
为了验证基于LRDT的目标检测与航迹提取算法的处理效果,选用前文的海试数据,经亮点预处理后,运行LRDT算法模块,结果如图8中下图所示。图中,颜色深浅表示了目标的置信度,颜色越明亮,置信度越高。图8上图显示的是LRDT处理前的多帧数据的可疑亮点位置图,可以看出,经聚类预处理后的虚警亮点个数仍比较高;而通过LRDT算法处理后,可疑亮点数减小,如下图。另一方面,图中舷角为340°、采样点为1800位置附近有一弱小目标,在连续四次的扫描探测中仅有两次检测到该目标,其统计的检测概率为0.5,经LRDT算法处理后,有效截获了该弱小目标。

图8 LRDT处理前后的对比
由此可知,基于LRDT的目标检测与航迹提取算法通过对主动声呐离散观测序列的多帧探测数据进行联合处理,并利用目标运动轨迹的时域连续性和能量统计分布规律性,在较大程度降低目标检测虚警概率的基础上提高了淹没在多杂波亮点干扰下弱小目标的发现概率,同时实现了依靠声呐设备自主完成疑似目标判定进而起始跟踪。
3 结论
本文在研究海杂波空域、时域和能量域特性的基础上,设计了基于空域领域聚类的亮点预处理算法和基于LRDT的目标检测与航迹提取算法。实际数据处理表明,本文所提方法可以使监视区内的目标虚警率降低70%到90%,并提高小目标发现概率、缩短目标初始航迹的起始时间。
参考文献:
[1] 李正周, 彭素静, 金钢, 等. 基于假设检验的小弱运动目标航迹起始[J]. 光子学报, 2008,37(3):613-617.
[2] 康莉. 拦截技术中目标跟踪若干关键技术研究[D]. 西安电子科技大学, 2008.
[3] 易伟. 基于检测前跟踪的多目标跟踪算法研究[D]. 电子科技大学, 2012.
[4] PUNITHAKUMAR K, KIRUBARAJAN T, SINHA A. A sequential monte carlo probability hypothesis density algorithm for multitarget track-before-detect[J]. Proc. Of SPIE, 2005, 5913.
[5] KENNEDY HUGH LACHLAN. Clutter-based test statistics for automatic track initiation [J]. ACTA, 2008, 34(3):266-273.