
基于可编程控制器的群控电梯模型设计与实现
2016-01-20 12:50杨保亮胡勤国陈晓红
重庆文理学院学报(社会科学版) 2015年5期
关键词:可编程控制器
李 鹏, 杨保亮, 胡勤国, 陈晓红
(1.重庆文理学院电子电气工程学院, 重庆 永川 402160; 2.重庆大学通信工程学院, 重庆 沙坪坝 400044)
基于可编程控制器的群控电梯模型设计与实现
李鹏1,2, 杨保亮1, 胡勤国1, 陈晓红1
(1.重庆文理学院电子电气工程学院, 重庆永川402160; 2.重庆大学通信工程学院, 重庆沙坪坝400044)
[摘要]文章设计并实现了一种以可编程控制器为核心控制器的群控电梯模型.基于可编程控制器的电梯模型具有可靠性高,维护方便,能耗低,通信、组网能力强等优点.该电梯模型的设计与实现为电梯设计、制造、维修维护技术人员掌握电梯工作原理,熟悉电梯运行过程提供了实际对象.
[关键词]群控电梯模型;可编程控制器;输入输出端口;旋转编码器
电梯是现代社会高层建筑中最重要的垂直交通工具.在电梯数量上,截止到2013年底,我国电梯保有量已达250余万台.在电梯类型上,除了常见的垂直运行电梯外,还增加了自动扶梯、自动人行道等新型电梯.在电梯工作方式上,大型、高层商住楼宇中的电梯已在原有单梯运行、并联运行的基础上,增加了群控工作方式.在电梯应用领域中,电梯已从住宅、写字楼、商场扩展到医院、轨道交通、机场等场所[1].电梯数量的快速增长、类型的丰富、工作方式的演进及应用领域的扩展,对电梯的设计、制造,特别是电梯维修维护技术人员的培训提出了挑战[2].电梯产业亟需电梯教学、培训模型.技术人员通过对电梯模型的安装、调试、故障检修,迅速掌握电梯的组成结构、工作原理、运行过程等与电梯相关的知识、经验及技术.本文设计并实现一种垂直运行群控电梯模型.该电梯模型以可编程控制器作为核心控制器,可靠性高,编程简单,功能完善,维护方便,体积小,重量轻,能耗低,通信、组网能力强.运行结果表明,电梯模型能够实现预定功能.
1群控电梯模型设计要求
群控电梯模型共用厅外呼叫信号,根据群控调度算法调度电梯,按照乘梯时间最短、顺向、就近原则对呼叫指令进行逐一响应.电梯模型自动清除与电梯运行方式不符的呼叫指令.电梯轿厢运行至某一平层时,轿厢开门,清除该层呼叫指令,轿厢门开到位后,延时数秒关门.轿厢门关到位后,电梯继续运行至其它层站.当电梯过载时电梯报警,电梯不运行,轿厢门不关闭.电梯模型具有防夹功能,可显示电梯轿厢当前所处楼层及电梯运行方向.
2电梯模型群控系统
电梯群控是指将3台或3台以上的电梯作为一个电梯组,利用群控模块调度电梯组运行的电梯控制方式.电梯群控可有效缩短乘客的乘梯时间,提高电梯群组的运行效率[3].电梯模型群控系统如图1所示.各电梯控制器分别采集对应电梯的当前楼层、运行方向、目标楼层等运行状态信息.电梯控制器将各部电梯运行状态信息通过通信总线传送至群控调度模块.群控调度模块根据各部电梯当前运行状态,计算出各部电梯对某一厅外呼叫的乘梯时间,指派乘梯时间最短的电梯响应该厅外呼叫.
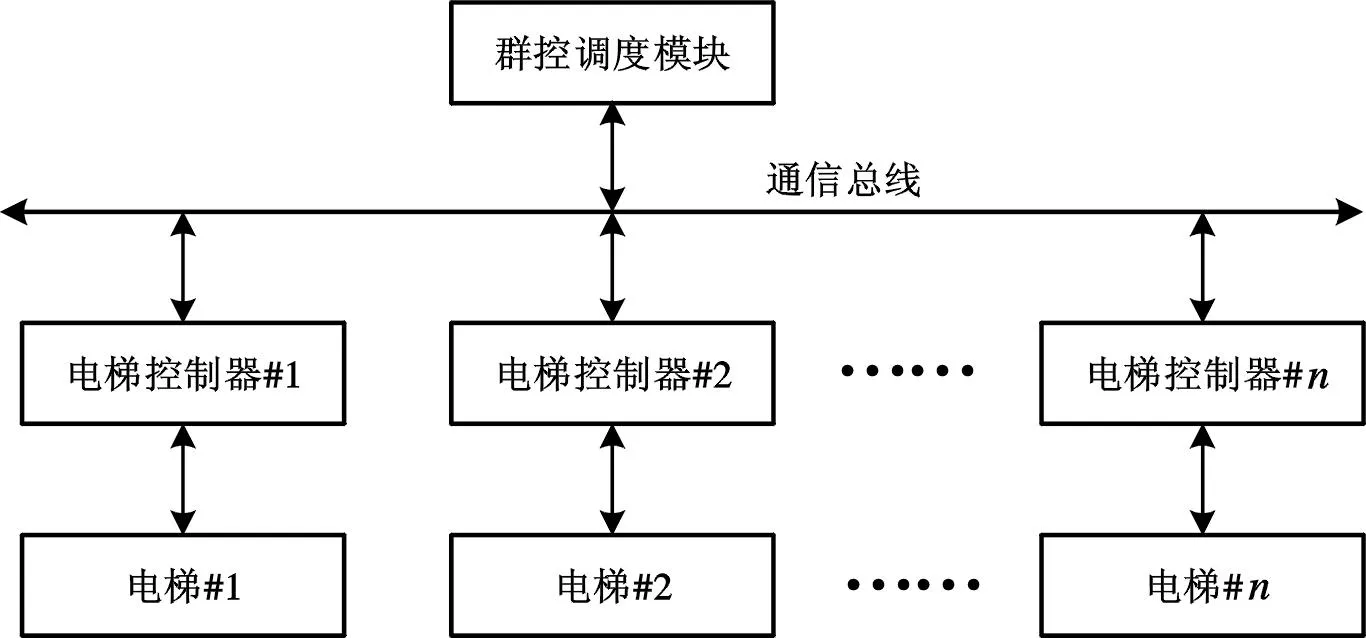
图1 电梯模型群控系统
图2中的乘梯时间T(i)由(3)式确定.(3)式中,Tm(i)为电梯从当前楼层运行至厅外呼叫楼层所需时间.Tn(i)为电梯i从厅外呼叫楼层运行至目标楼层所需时间.电梯模型的楼层间距和运行速度已知,利用(1)、(2)式计算得到Tm(i)、Tn(i).
Tm(i)=∣当前楼层 - 厅外呼叫楼层∣×楼层间距/电梯运行速度
(1)
Tn(i)=∣目的楼层 - 厅外呼叫楼层∣×楼层间距/电梯运行速度
(2)
T(i)=Tm(i)+Tn(i)
(3)

图2 基于乘梯时间最短的派梯选择
3电梯模型组成结构
电梯模型由轿厢系统、重量平衡系统、运行导向系统、曳引系统、门系统、电力拖动系统、电气控制系统及安全保护系统8部分组成[4].轿厢是电梯装载乘客或货物的箱型结构部件.重量平衡系统主要由轿厢、对重及绳重平衡链3部分组成.对重用于平衡轿厢的重量,保证轿厢与对重之间的重量差保持在限定范围之内,减轻曳引电机驱动电梯上下行时的负荷.运行导向系统限制轿厢和对重的活动自由度,使电梯稳定运行于井道中.曳引系统驱动电梯的上下行.门系统实现电梯模型的开关门、封闭层站入口等功能.电力拖动系统实现对曳引电机、门电机的启停、调速等控制.电气控制系统实现电梯模型运行方向控制、层站显示、层站呼叫管理.安全保护系统实现电梯平层、超速、防夹、过载等保护功能.
如图3所示,可编程控制器是电梯模型的控制核心.可编程控制器通过其输入端口,采集呼梯信号、轿厢位置信号、限位信号、过载信号等外部输入信号.可编程控制器利用采集的外部输入信号,结合自身控制程序的控制逻辑进行运算,得到运算结果;根据运算结果,通过输出端口将运算结果输出,用以控制被控对象[5].电梯模型中作为可编程控制器控制对象的有:呼梯显示装置、楼层显示装置、运行方向显示装置、门电机、曳引电机.利用带灯指示的按钮实现呼梯显示,指示电梯模型各层站的内呼及厅外呼叫.利用七段数码管实时显示当前电梯轿厢所处楼层.利用电梯专用的双箭头LED实现运行方向显示,显示电梯运行方向.可编程控制器控制门电机的启停、正反转,门电机驱动轿厢门开关.可编程控制器控制曳引电机的启停、正反转,曳引电机驱动电梯上下行.利用旋转编码器测定电梯上下行的速度.旋转编码器与曳引电机同轴相连,与曳引电机以相同的转速转动.旋转编码器每转过一周,向外界输出若干脉冲.根据单位时间内接收到的脉冲数量,测定曳引电机转速,获知电梯模型轿厢上下行运行速度,为调节轿厢上下行运行速度提供参考信号.

图3 电梯模型组成结构
4电梯控制器输入输出端口分配
根据电梯模型设计要求,电梯模型中的可编程控制器共需输入端口30点,输出端口21点.因此,选用三菱可编程控制器FX2N-64MT作为电梯模型的核心控制器.该型号可编程控制器共有64个输入输出端口.其中,输入端口32个,输出端口32个,提供两路24 V直流电源[6].可编程控制器提供的两路直流电源为电梯模型中的带灯指示按钮、接近开关、旋转编码器、轿厢门电机、数码管等低功耗装置供电.
可编程控制器的输入端口分配如表1所示.可编程控制器输入输出端口按八进制编号.对于可编程控制器FX2N-64MT,适合用来作为高速计数输入端的输入端口有X0~X7.当某个高速计数输入端被某个高速计数器占用后不能再做它用[7].电梯模型选用X0作为旋转编码器脉冲输入端,选用高速计数器C235对来自输入端X0的高速脉冲进行计数.
电梯模型共有6层,1层没有下呼按钮,6层没有上呼按钮.6层电梯模型厅外呼叫按钮共计10个.厅外呼叫按钮均为带灯指示按钮.例如,带灯指示按钮SB1与可编程控制器输入端X1相连.按钮SB1按下,发起一层厅外呼叫.其余按钮SB2~SB10分别与X2~X12对应相连.由于电梯模型轿厢内空间有限,人无法进入轿厢内部进行内呼、开关门操作.因此,利用无线遥控装置来模拟轿厢内的内呼操作,制作了一个无线接收装置,装置上配置了9个继电器KM1~KM9.这些继电器与可编程控制器输入端对应相连.例如,当利用无线遥控装置进行一层内呼时,继电器KM1的触点动作,输入端X13采集到一层内呼信号.其余KM2~KM6继电器的工作方式与之类似.
继电器KM7、KM8、KM9用于向可编程控制器输入遥控开、关门信号和轿厢灯控制信号.利用接近开关SQ1~SQ6为可编程控制器提供轿厢平层信号,检测轿厢所处楼层.当某一接近开关向可编程控制器输出信号时,说明轿厢处于对应楼层.限位开关SQ7、SQ8通过输入端X32、X33向可编程控制器提供轿厢门开到位、关到位信号.接近开关SQ9通过输入端X34向可编程控制器提供防夹信号,避免轿厢门夹人、夹手.压力传感器SP1通过输入端X35向可编程控制器提供电梯过载信号.

表1 输入端口分配
可编程控制器的输出端Y0、Y1分别控制曳引电机、门电机的运行.输出端Y2、Y3控制电梯模型运行方向指示灯.当Y2输出时,上行运行指示灯亮;当Y3输出时,下行运行指示灯亮.Y4、Y5输出门电机开关门控制信号.当Y4输出时,门电机正转,驱动轿厢门开门;当Y5输出时,门电机反转,驱动轿厢门关门.输出端Y6控制轿厢灯的亮灭.输出端Y7~Y20分别与带灯指示按钮的指示灯相连,控制电梯模型1到6层外呼指示灯的亮灭.输出端Y21~Y24输出4位BCD码,控制楼层显示数码管,显示电梯模型轿厢当前所处楼层.
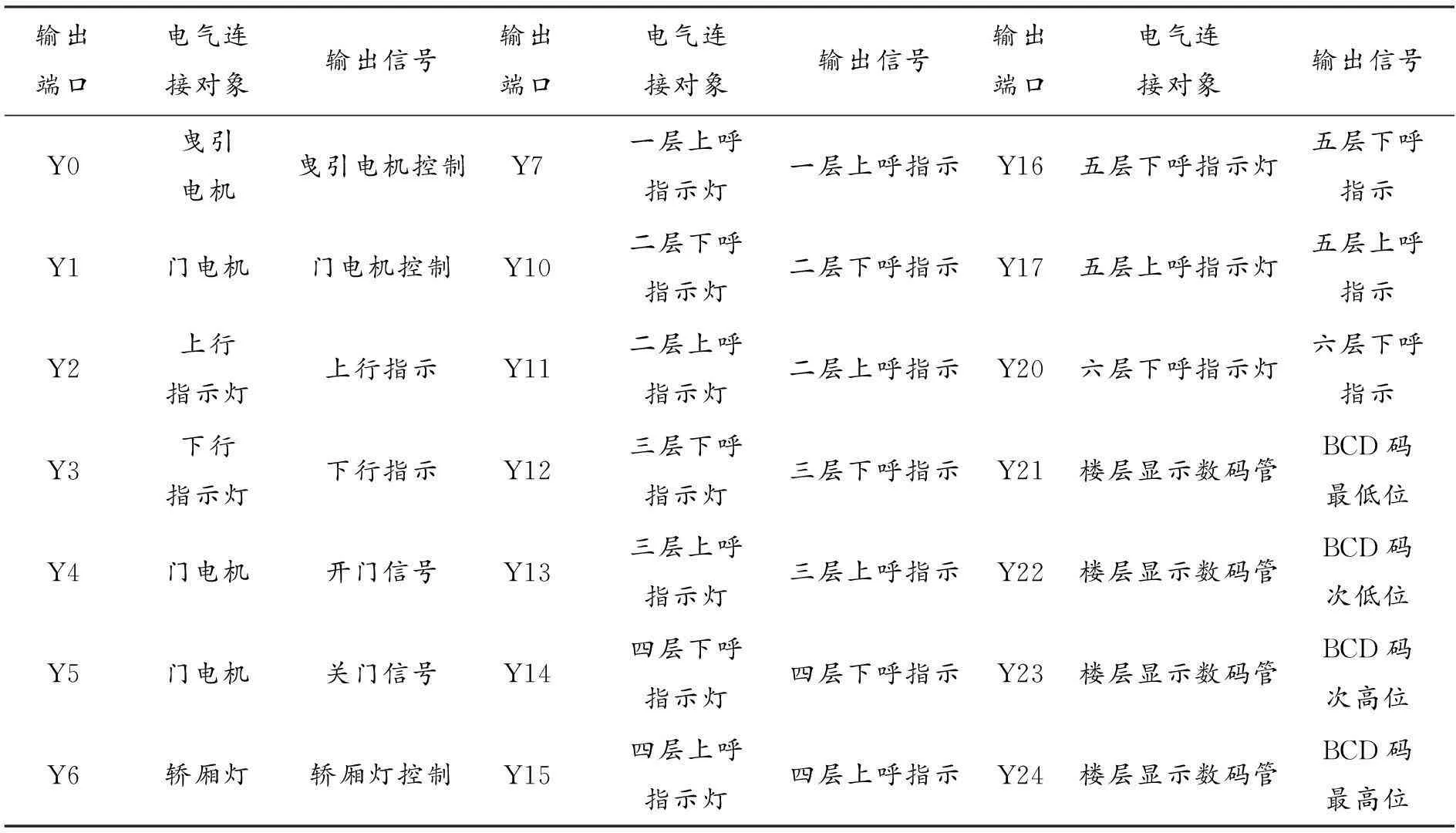
表2 输出端口分配
5电梯模型运行程序
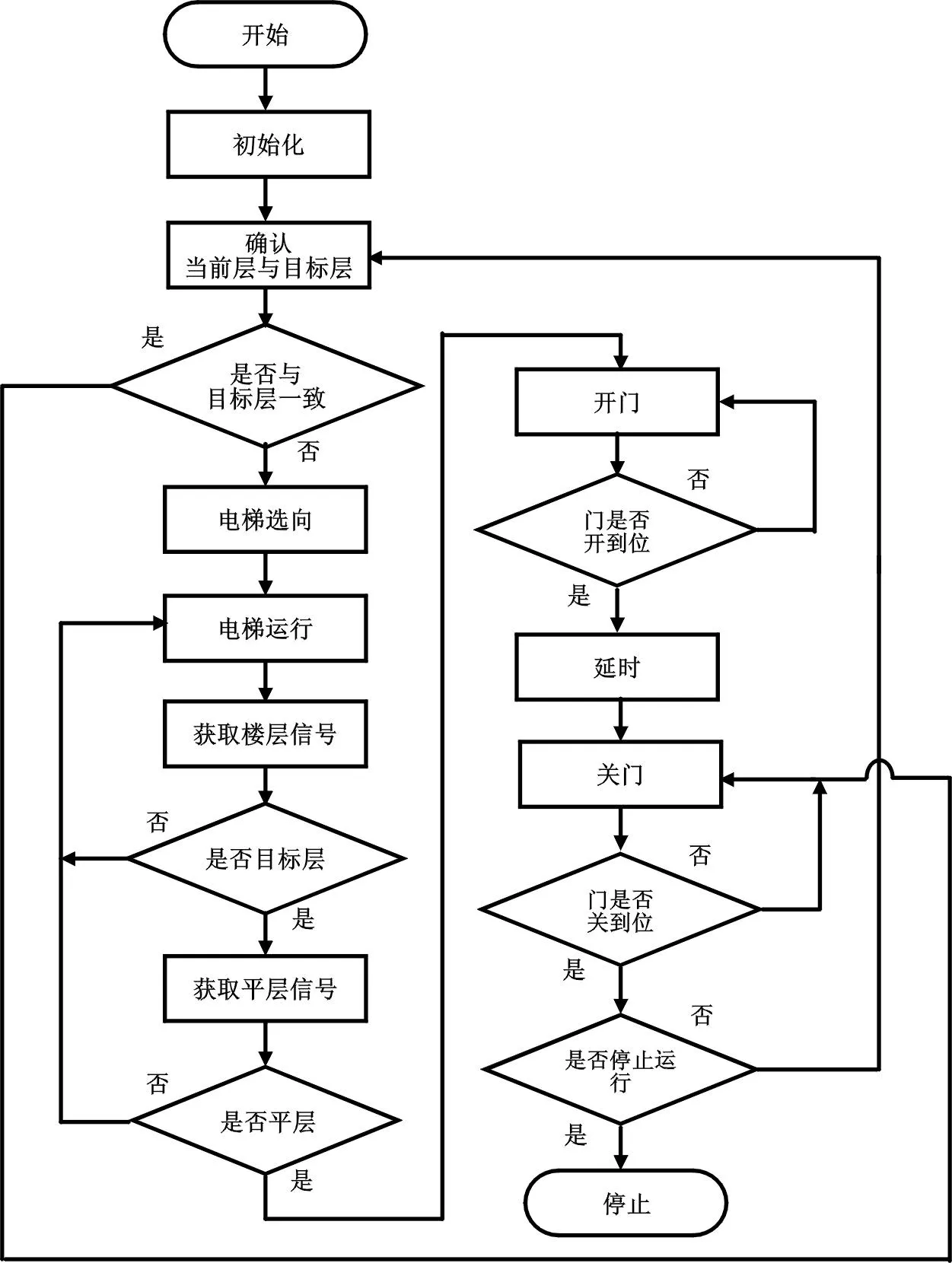
图4 电梯模型运行程序流程
电梯模型运行程序流程如图4所示.电梯模型上电后首先进行初始化.若轿厢门未关闭,则关闭轿厢门;若轿厢未在平层位置,则向上运行至最近平层位置.电梯平层后,确认当前楼层与目标楼层,接着判断当前楼层与目标楼层是否一致,是则执行关门过程;否则进行电梯运行方向选择.电梯运行后,不断检测当前所处楼层.判断当前所处楼层是否为目标楼层.是则获取平层信号,平层后执行开门程序;否则电梯继续按原来运行方向运行,直至当前楼层与目标楼层一致,且轿厢已平层.轿厢执行开门程序,直至轿厢门开到位为止.轿厢门开到位后,延时数秒,轿厢门关闭.轿厢门关到位后,判断是否还有其它呼叫信号.如果有,则重复上述响应过程;如果没有,则停止运行.
6结语
本文设计并实现了一种以可编程控制器为核心控制器的6层垂直运行群控电梯模型.群控电梯模型共用厅外呼叫信号,根据群控调度算法调度电梯,按候梯时间最短、顺向、就近原则对呼叫指令进行逐一响应.电梯模型采用群控工作方式,丰富了电梯模型的工作模式,缩短了乘客的乘梯时间,提高了电梯组的运行效率.基于可编程控制器的群控电梯模型具有可靠性高、能耗低等优点.该电梯模型的设计与实现可以为电梯的设计、制造、维修维护技术人员掌握电梯工作原理、熟悉电梯运行过程提供实际对象.
[参考文献]
[1]盛世华研. 2013-2017年中国电梯行业市场及发展分析报告[EB/OL]. (2013-11-10) [2014-07-24].http://wenku.baidu.com/view/f2225b7da417866
fb84a8e12.html.
[2]杨祯山, 邵诚. 电梯群控技术的现状与发展方向[J].控制与决策, 2005, 20(12): 1321-1331.
[3]刘杰, 李鹏. 基于可编程控制器的分拣装置设计与实现[J].西南师范大学学报:自然科学版, 2014, 39(7): 98-101.
[4]贺德明, 肖伟平. 电梯结构与原理 [M].广州: 中山大学出版社, 2009.
[5]周桦. 电梯PLC控制系统的设计与实现 [D].成都: 电子科技大学, 2012.
[6]三菱电机自动化(上海)有限公司. FX2N系列微型可编程控制器使用手册[EB/OL]. (2011-08-11) [2014-07-28].http://cn.mitsubishielectric.com/fa/zh/download/dwn_idx_manual.asp.
[7]李建兴. 可编程序控制器应用技术 [M].北京: 机械工业出版社, 2004.
(责任编辑穆刚)
Design and implementation of group control elevator model
based on programmable logic controller
LI Peng1, 2, YANG Baoliang1, HU Qinguo1, CHEN Xiaohong1
(1.School of Electronic and Electrical Engineering, Chongqing University of Arts and Sciences, Yongchuan Chongqing 402160, China;
2.College of Communication Engineering, Chongqing University, Shapingba Chongqing 400044, China)
Abstract:The design and implementation of group control elevator model used programmable controller as the core control device. Elevator model based on programmable controller has the advantages of high reliability, easy maintenance, low energy consumption, strong ability of communication and networking. The elevator model provides practical object for the elevator design, manufacture and repair and maintenance technicians to master the work principle and the operation of elevator.
Key words:group control elevator model; programmable logic controller; input port and output port; rotary encoder
[中图分类号]TP273
[文献标志码]A
[文章编号]1673-8004(2015)05-0076-05
[作者简介]李鹏 (1981-),男,重庆九龙坡人,讲师,博士,主要从事电气工程及自动化方面的研究.
[基金项目]重庆文理学院校级科研项目(Y2010DQ57);重庆文理学院教学改革项目(130215);重庆大学研究生科技创新基金项目(CDJXS12161103).
[收稿日期]2014-10-16
猜你喜欢
山东青年(2016年10期)2017-02-13
科技创新与应用(2016年34期)2016-12-23
山东工业技术(2016年23期)2016-12-23
科技视界(2016年18期)2016-11-03
现代经济信息(2016年2期)2016-10-27
中国市场(2016年36期)2016-10-19
科学与财富(2016年28期)2016-10-14
科教导刊·电子版(2016年21期)2016-08-23
