
爬壁机器人应用嵌入式控制的探讨
2016-01-19 17:02马勇利
科技与创新 2016年2期
关键词:模块设计
马勇利
摘 要:爬壁机器人的运行速率高、跨障碍性好、适应性强。为了强化其运动控制,特在机器人驱动控制方案中加入了嵌入式控制系统,凸显系统的实时性和专业性,以满足机电控制系统对实时性提出的要求。通过深入分析爬壁机器人的驱动和控制原理,探讨如何有效地在爬壁机器人本体中安装嵌入式控制系统,从而提高机器人的实时操作和控制能力。
关键词:爬壁机器人;驱动控制系统;嵌入式控制;模块设计
中图分类号:TP242 文献标识码:A DOI:10.15913/j.cnki.kjycx.2016.02.016
1 嵌入式系统控制及其特征
嵌入式系统是指利用计算机技术裁剪软件和硬件,满足用途、成本、能耗等方面要求的计算机控制系统。其硬件主要包括微处理器(控制器)、存储器、外围器件和I/O接口等;软件主要包括操作系统EOS和相关的应用程序。微处理器和操作系统是该系统的关键组成部分。该系统主要针对特定应用实现了计算机电子技术、半导体技术在不同领域的有机结合。在设计系统的过程中,需权衡功用、能耗和成本3个指标,以实现设计方案的最优。
嵌入式系统主要有以下几个特征:①内核小。与通用的操作系统相比,嵌入式系统的内核仅占5 kB左右。②专业性强。软件、硬件紧密结合,个性化很强,可以根据任务需要移植硬件,通过程序编译下载、更改系统。③简化系统。整个系统内无冗余成分,有效降低了成本,保证了系统的安全性。④强实时性。系统内的软件代码必须固化储存,以保证其运行率。⑤系统开发的专门性。相关人员不能自主开发嵌入式系统,而用户也不能擅自修改它,必须在特定的开发环境中使用配套的开发工具,主要包括宿主机和目标机。其中,前者用于程序开发,后者用于执行开发,两者可以在不同的机型上进行交叉式开发。
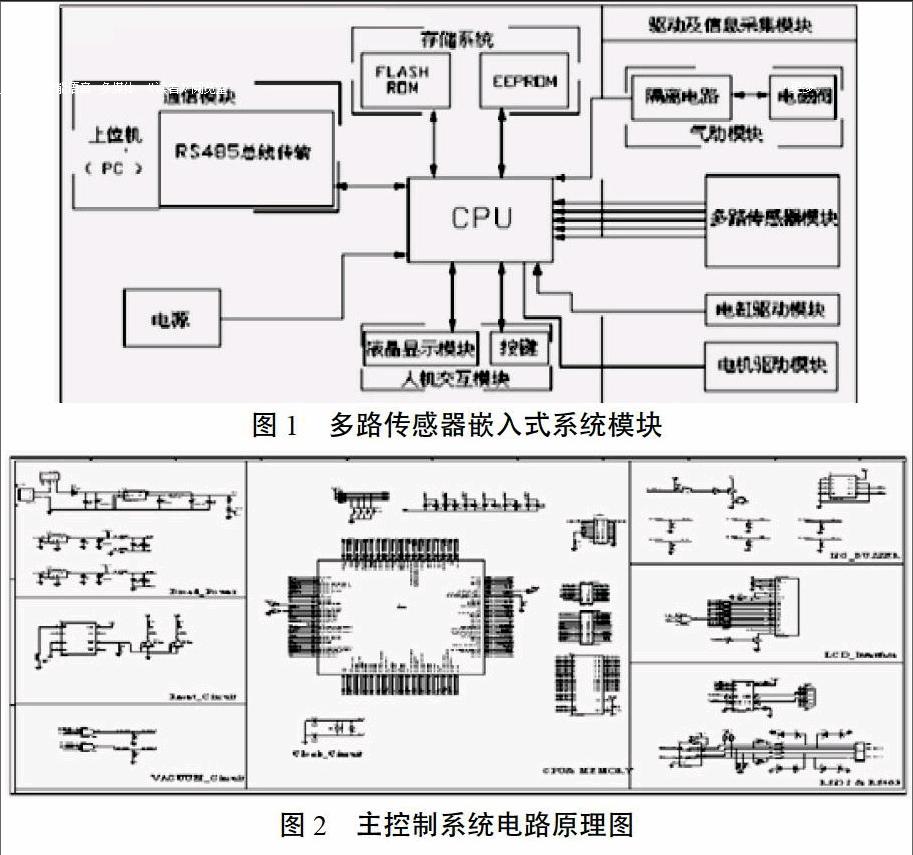
机器人控制系统主要由CPU存储系统、气动模块、电缸驱动模块、电机驱动模块、多路传感器模块、通信模块、人机交互模块和电源模块组成。多路传感器嵌入式系统模块如图1所示,主控制系统电路原理如图2所示。
2 嵌入式系统模块设计
2.1 CPU和存储系统的设计
在整个嵌入式控制系统中,CPU是非常重要的一部分,它承担着外设协同工作,所以,必须符合数据算法处理的相关要求。嵌入系统中的CPU主要有2种:①DSP,主要用于处理数字信号;②ARM,其能耗低、成本低、性能高。
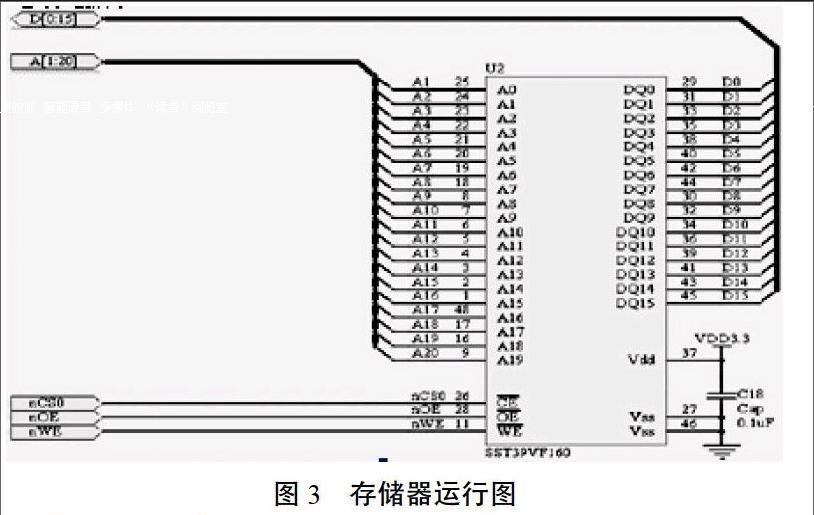
在该模块中,存储器主要用于储存数字图像和工作状态参数。因为储存的内容不同,所以,储存容量和速率也不相同。存储数字图像时,要求容量大、存取速度快,因此,可以选用型号为SST39VF160的Flash存储器,其内存为2 M,存储器与CMOS兼容,可直接连接LPC2214并口,具体运行情况如图3所示。
2.2 气路真空检测
气路真空检测主要检测的是吸盘能否达到真空状态,是否具有吸附功能。在爬壁机器人运行的过程中,吸盘接触到壁面后,要经过一段时间才能保证盘内的真空度达到-0.8 bar。在这段时间内,另一组吸盘必须保证其吸附性,保证有足够的吸附力。当吸盘内的真空度维持在-0.8 bar时,才能让另外一个吸盘脱离墙壁,使机器人完成下一步操作。为了保证吸盘真空度的精确性,在具体的操作过程中,可以利用真空开关将真空压力转化为电信号,将压力门的阈值调整为-0.8 bar,从而实现机器人的自动化智能操作。真空开关与CPU的信号连接电路如图4所示。
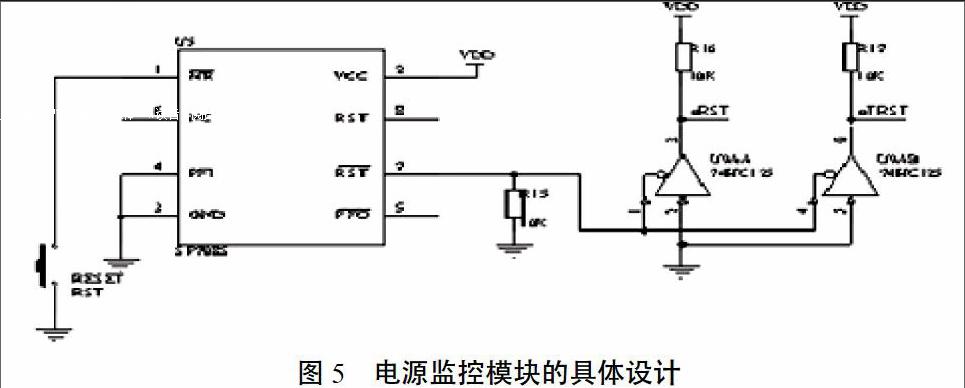
2.3 电源模块设计
在嵌入式控制系统中,LPC2214芯片中有4组电源输入,即数字3.3 V、数字1.8 V、模拟3.3 V和模拟1.8 V。嵌入式系统的电源设计主要采用模拟3.3 V,CPU等硬件的芯片供电也都采用该组电源输入。另外,当系统的运行频率保持在50 MHz以上,并且严格要求电源的纹波时,可利用电源监视设备保证电压的稳定性,从而保证系统工作的稳定性。一般情况下,一个系统内有3组电源和电源监视模块。电源监控模块是SP708S,系统上电之后,可利用电源监控系统保持电源的稳定性。当电压低于3.0 V时,系统会自动触发CPU复位,防止意外的发生。电源监控模块的设计如图5所示。
系统中大多数芯片所需的电压为3.3 V,这些芯片包括ARM、SRAM、FLASH ROM和RS-485收发器等。为了满足低功耗的要求,ARM芯片内核可采用1.8 V电源(其I/O电源为3.3 V)。
3 结束语
本文详细介绍了爬壁机器人运行过程中的主要特征及其运行弊端,凸显出嵌入式系统的实时性能和专业性能,以期为日后的相关工作提供参考。
参考文献
[1]周雪峰,江励,朱海飞,等.一个模块化机器人平台的设计[J].华南理工大学学报(自然科学版),2011(04).
[2]曹建福,汪霖.模块化工业机器人嵌入式控制系统的研究[J].控制工程,2013(02).
〔编辑:白洁〕
猜你喜欢
电脑知识与技术(2016年34期)2017-04-15
经济研究导刊(2017年6期)2017-03-24
山东工业技术(2016年24期)2017-01-12
医学信息(2016年29期)2016-11-28
电脑知识与技术(2016年26期)2016-11-24
电脑知识与技术(2016年22期)2016-10-31
科技与创新(2015年17期)2015-09-11
现代电子技术(2015年11期)2015-07-28
现代电子技术(2015年5期)2015-03-31
