
渤海水下软刚臂式单点系泊系统现场监测预警技术研究与应用
2016-01-18 09:59:08李德斌,严明
船海工程 2015年5期
渤海水下软刚臂式单点系泊系统现场监测预警技术研究与应用
李德斌,严明
(中海油能源发展采油服务公司, 天津 300451)
摘要:针对海洋环境条件愈加恶劣,频发的单点系泊事故导致严重的经济损失及社会影响,运用现有的监测技术及监测手段对使用中的系泊系统进行准确可靠的监测和评价,既为油田作业者提供及时准确的系泊信息,又为其提供安全管理预案。
关键词:单点系泊;水下软刚臂;监测预警
DOI:10.3963/j.issn.1671-7953.2015.05.013
中图分类号:U662.9;P754
文献标志码:A
文章编号:1671-7953(2015)05-0043-05
收稿日期:2015-07-30
作者简介:第一李德斌(1990-),男,学士,助理工程师
Abstract:In recent years, the marine environment has become more and more severe, and the accidents of single point mooring system have caused serious economic losses and social impacts. The application of the existing monitoring techniques and means is investigated to achieve accurate and reliable monitoring and evaluation for the use of the mooring system. It can not only provide the accurate mooring safety information in time for the oil field operator, but also provide the safety management plans.
修回日期:2015-09-01
资助项目:工信部项目(2069F1110015)
研究方向:海工自动化技术
E-mail:lidb12@cnooc.com.cn
浮式生产储油装置(FPSO)系泊系统是关系到FPSO能否正常作业的关键环节,一旦系泊系统受到破坏,则FPSO的安全将受到极大威胁,轻者造成停产关井,带来严重的经济损失;重则有溢油危险,可能引发生态灾难。
对于FPSO而言,如何通过现有的监测技术及监测手段对其系泊系统做到准确可靠的监测和评价,既可准确判断其系泊系统的安全性,对可能发生的破坏提前预测,为管理作业者提供及时准确的系泊安全性信息;又可供其有预案的进行安全管理,防范于未然,成为作业者普遍关心的问题。本文以渤海水下软刚臂式单点系泊的海洋石油112FPSO为例,进行监测预报系统的开发与应用。
1监测预警系统概述
FPSO长期系泊于海上,系泊系统的破坏主要由环境条件和船体运动相互耦合作用所引发,因此在国内外现有监测技术与方法调研及FPSO单点系泊常见失效模式分析的基础上,通过对环境条件、船体运动姿态,以及单点状态等方面的监测,对系泊系统的安全状态进行整体掌握,在达到危险工况时进行报警;同时通过对未来环境条件及FPSO装载状况的预判,可以对系泊系统的受力进行预报,并给出主动控制建议,这也是本系统的创新所在。
结合现场实际情况,制定监测预警方案,主要包括以下几部分。
1)海洋环境条件监测系统。
波浪、海流要素监测。
风要素监测。
气象要素监测。
2)FPSO运动和位置监测系统。
FPSO运动姿态和艏向监测。
FPSO位置及与单点间距监测。
3)单点状态监测。
单点系统关键节点应变监测。
Yoke运动姿态监测。
锚链姿态和受力监测。
单点上部结构振动监测。
4)快速响应预报及主动控制系统。
各测量子系统将测量数据实时上传到FPSO中控室中集成数据采集与处理系统,完成数据的存储、处理和显示等工作。
2海洋环境条件监测系统
环境监测是结构安全预警的重要手段,同时也为FPSO系泊系统安全评估提供必要的资料[7]。环境条件监测内容包括:波浪要素监测、海流要素监测、风要素监测以及气象要素监测。
1)波浪海流要素监测。波浪和海流是非常重要的海洋环境参数,对FPSO运动和系泊系统受力有重要作用[1]。浪流监测参数包括浪高、浪向、周期、波浪谱、剖面流速及流向,测量设备采用PUV(压力)和AST(声表面跟踪技术)两种方法测量波浪,采用声学多普勒法测量剖面流。
浪流仪每小时测定一组数据,通过对每小时前17 min数据的自动分析,能够获取到该时间段最大波高、有义波高、平均波高及各自所对应的周期。鉴于作业海域水深较浅,为避免守护船舶或渔船损坏测量设备,将浪流仪安装在WGPA平台导管架水下桩腿上(见图1),采用U形抱卡将外伸支架固定在导管架上。声学多普勒浪流仪测量结果直接通过线缆传输到WGPA中控室中采集设备,并通过油田局域网将数据发送到FPSO集成监测系统。

图1 水下浪流仪安装示意
2)风要素监测。风载荷也是环境载荷的重要组成部分,风参数主要监测3 s阵风风速、风向,10 min、1 h平均风速及风向[2],监测设备选用目前海洋平台及FPSO上应用广泛的机械式风速风向仪。
3)气象要素监测。气温、湿度和气压是表征大气状态的重要物理量。气温是天气预报的直接对象,各种天气形势、气压场和风场变化都与气温有关。湿度表示大气干燥程度的物理量,在一定程度上反映了降雨、有雾的可能性。气压即大气压强,其高低与空气的密度、温度和湿度都有关系。
3FPSO运动和位置监测系统
1)FPSO运动及艏向监测。FPSO船体运动测量是整个监测系统重要的组成部分,对确定与其连接的立管、系泊系统的运动和受力有重要作用。在风、浪、流联合作用下,FPSO将产生6自由度运动,即横荡、纵荡、垂荡、横摇、纵摇和艏摇[3]。
目前海洋工程领域常用的浮体6自由度方法包括惯性测量技术(inertial measurement unit,IMU)、惯性测量单元(inertial navigation system,INS)惯性导航系统、全球导航卫星系统(global navigation satellites system,GNSS)和水声定位系统(acoustic positioning system,APS),其中惯性测量技术不受外界干扰可独立实现高精度测量,而卫星导航技术或水声定位系统测量精度易受外界影响。由于惯性测量技术存在累计误差不适用长期测量,目前实际应用中通常采用两种以上技术组合的形式,即GPS/IMU或GPS/INS测量系统[6]。为了实现长期、稳定、可靠的测量数据,本系统采用了GPS/IMU(惯性导航单元)组合系统测量FPSO船体运动。
组合测量系统的GPS天线安装在FPSO生活楼顶端开阔、无遮挡的位置,天线与FPSO中轴线平行。测量系统主机放置在中控室机柜内,测量数据将直接由运行在工控机上的集成监测系统采集,并进行可视化显示。同时,通过两个GPS天线测量精确位置和基线长度,可以解算出基线与地理北的夹角,进而得到船体的艏向角。见图2。

图2 GPS基站及移动站原理
2)FPSO位置及与单点间距监测。目前FPSO位置测量国际上通用的方法为GPS测量。此次测量所需精度较高,因此采用了GPS的实时载波相位动态差分测量技术(RTK)。将GPS基准站设立在单点顶部平台中心位置,GPS移动站设立在FPSO生活楼上。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给移动站,移动站通过数据链接收来自基准站的数据,同时采集GPS观测数据,并在系统内组成差分观测值进行实时处理[5-6],给出FPSO的位置信息及于单点间的距离。
4单点状态监测系统
1) 单点系统关键节点应变监测。与传统的应变传感器相比,光纤光栅传感器具有抗电磁干扰、电绝缘性能好、耐腐蚀、传输损耗小、传输量大和测量范围广等特点,在航空航天、土木工程、复合材料、石油化工等领域取得了广泛的应用。
由于光纤光栅中心波长对温度与应变同时敏感,为了保证良好的测量的精度,112FPSO单点关键节点应变测量使用光纤光栅应变传感器和光纤光栅温度传感器。光纤光栅应变传感器和温度传感器将沿外套筒横截面对称布置,并将传感器直接焊接在SPM结构外表面。为了提高传感器水下成活率,传感器安装将留有一定冗余度,即每一个截面安装6个应变传感器和2个温度传感器。见图3。

图3 水下外套筒光纤光栅布点
光纤传感器以串联的形式连接在一起,通过两条单模光缆构成的回路将数据传送到中控室中解调仪进行解调,并将各通道测量结果上传到集成监测系统,完成测量结果解算、存储和显示等。
2)Yoke运动姿态监测。Yoke运动姿态将采用双轴倾角传感器进行测量,倾角传感器分别安装在Yoke配重与Yoke臂连接位置,电源和信号电缆沿系泊锚链敷设到FPSO水上单元[8]。见图4。
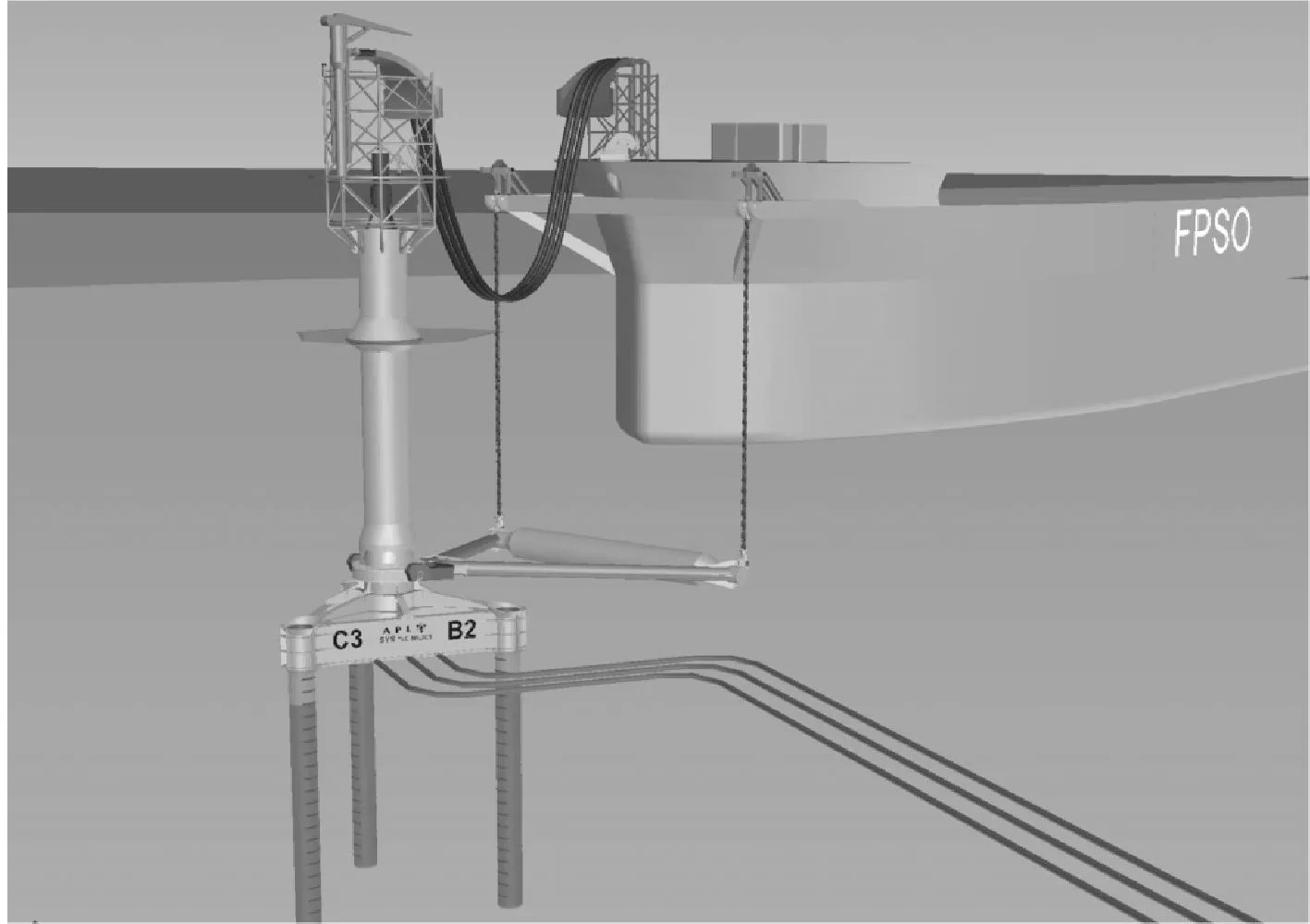
图4 水下YOKE倾角仪安装位置示意图
3)锚链姿态和受力监测。锚链受力测量可以采用轴销式传感器,但由于轴销是荷载传递路径中的关键节点,一旦损坏后果不堪设想。从可操作性、可维护性以及经济性等方面考虑,锚链受力测量采用间接测量方案,即通过测量锚链支撑结构应变值反算锚链的受力[1]。
支撑结构形变测量采用FBG光纤光栅应变传感器。为了更好地确定支撑结构主应变方向和大小,每个测点焊接3个光纤光栅应变传感器和1个光纤光栅温度传感器, 锚链运动姿态测量采用双轴倾角传感器测量,获得锚链空间2个方向的运动姿态。
4)单点上部结构振动监测。通过对单点结构分析和各个位置的振动情况测试[9],选择了单点电滑环、单点内塔、上轴承、下轴承4个位置共安装8个加速度传感器,实现了16个通道的振动数据实时在线监控。振动监测系统利用单点到中控的备用光纤来进行通信,独立的监控系统安装在中控室内。
5快速响应预报及主动控制
FPSO采用单点系泊系统系泊于某一个特定的海域,由于海洋环境的不确定性,FPSO受到的环境荷载非常复杂。根据FPSO单点系泊系统特点和海上作业者的需要,创新开发了一套快速响应及主动控制系统(见图5)。

图5 主动控制系统原理
系统具备如下功能。
1)根据天气预报和环境条件,预报FPSO极限运动响应和均值响应,提供恶劣天气下装载优化建议。
2)根据天气预报和环境条件,预报系泊系统系泊力及安全状况。
3)根据输入的环境条件,提供FPSO作业风险评估结果。
4)根据实测单点状态(系泊力、振动),对潜在的作业风险提供预警[4]。
6集成监测软件
为了统一管理各设备测量数据,实现良好的人机交互方便人员操作,开发一套集成监测软件。该软件主要具备以下功能。
1)实时显示。根据监测测量内容和软件设计功能,可以结合波形图控件、仪表盘等定制化控件实时显示和刷新采集的物理量值。
2)自动报表生成。数据采集完成后,按一定时间频率抽取数据并绘成时历曲线,结合报表模板自动化生成监测系统测量报告。
3)远程通信。测量数据可以通过网络通信以TCP/IP或者UDP方法与其他站点运行的客户端进行交互数据传输,这样可以在某个站点查看其他客户端或者FPSO的数据。
4)数据查询及回放。系统数据以两种形式存在,原始测量数据以文件方式流盘,测量结果以数据库表单方式存储。数据回放模块可以离线打开存储数据进行回放、查询以及其他分析运算。
5)预报功能。预报功能能够有效地预报恶劣海况带来的作业风险,通过输入环境预报参数,根据预计的装载情况,通过差值及专用算法比对已经建立的计算模型,对未来作业时单点受力及与海底间隙给出预报。如若出现危险工况将给出合理的主动控制建议,供作业者参考。
集成控制系统见图6。
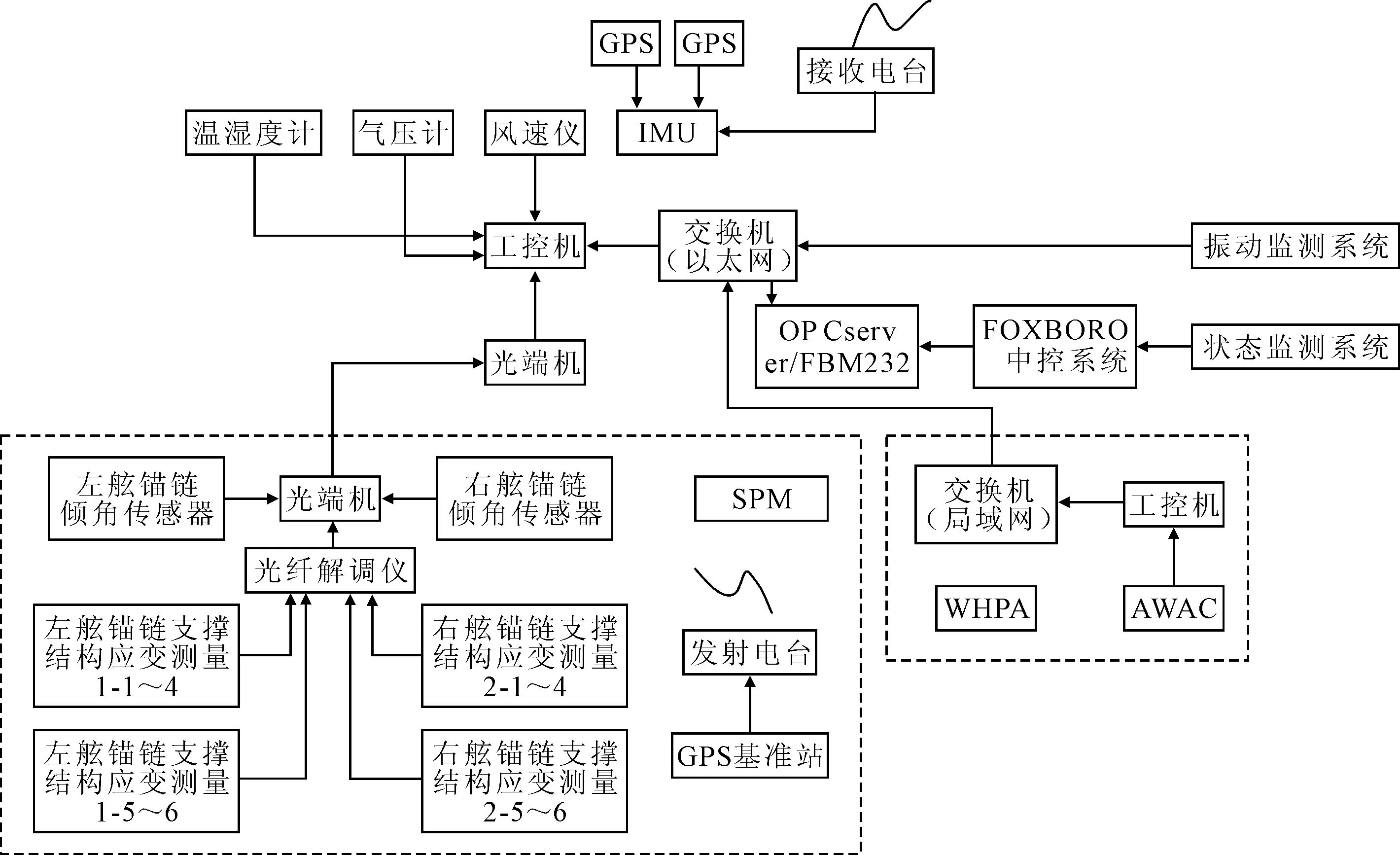
图6 集成控制系统示意
7结束语
以渤海某水下软刚臂式单点系泊的FPSO为例进行了监测预报系统的介绍,本系统在监测单点系泊运行状态的同时,为海上作业者提供了安全运维的配载建议,保障了海上作业安全。
参考文献
[1] 张炳夫,钱昆.系泊浮体在浅水波浪中运动响应的计算研究[J].船海工程,2010(5):32-39.
[2] 刘元丹,刘敬喜,谭安全.单点系泊FPSO风浪流载荷下运动及其系泊力研究[J].船海工程,2011(6):146-149.
[3] 魏跃峰,杨建民,陈刚,等.FPSO运动实测数据统计研究——“南海奋进号”FPSO实船测量研究Ⅰ[J].海洋工程,2011(3):96-101.
[4] 吴长生,罗耀安.单点系泊系统设备故障分析及对策[J].水运工程,2010(1):79-85.
[5] 邓健,王庆,潘树国,等.基于多参考站的分米级GPS伪距差分定位方法[J].东南大学学报:自然科学版,2010(2):316-319.
[6] 王军,于洪喜,曹桂兴.差分GPS定位技术[J].空间电子技术,2001(Z1):107-110.
[7] 赵文华,胡志强,杨建民,等.FPSO系泊系统载荷计算与分析——基于南海“奋进号”FPSO运动特性实船测量结果[J].中国海上油气,2011(2):116-121.
[8] 李淑一,王树青.基于多体分析的浅水FPSO和水下软钢臂系泊系统运动特性研究[J].中国海洋大学学报:自然科学版,2011(9):95-102.
[9] 肖龙飞,杨建民.浅水FPSO垂荡和纵摇运动的低频响应[J].舰船科学技术,2009(11):120-124.
Research of Field Monitoring and Early Warning
Technology for Single Point Mooring System in Bohai
LI De-bin, YAN Ming
(CNOOC Energy Technology & Services-Oil Production Services Co., Tianjin 300451, China)
Key words: single point mooring; soft yoke; monitoring and early warning
猜你喜欢
石油化工设备(2022年6期)2022-11-25 05:27:18
石油知识(2019年3期)2019-02-13 03:19:08
中国石化(2017年11期)2017-12-16 03:15:10
价值工程(2017年5期)2017-03-18 00:13:01
中华建设科技(2016年10期)2016-12-14 08:02:48
电脑知识与技术(2016年8期)2016-05-19 14:28:31
电脑知识与技术(2016年8期)2016-05-19 14:17:36
珠江水运(2016年3期)2016-03-23 14:34:47
科技资讯(2015年17期)2015-10-09 20:49:29
舰船科学技术(2015年8期)2015-02-27 15:38:44
