基于投影法检测光学元件面形的图形处理算法
2016-01-08 03:12苏海穆绵
光学仪器 2015年6期
苏海 穆绵


摘要:基于线结构光扫描测量和立体视觉测量相结合的三维检测方法——投影法,能够快速准确地实现光学元件面形的在线检测,通过对采集图片的图像预处理,区域立体匹配分析,曲线拟合及面形实验等算法还原被测光学元件面形模型。实验结果表明,将这种方法用于检测光学元件可以真实还原光学元件三维外貌特性,具有实际应用价值。
关键词:面形检测; 图像预处理; 区域立体匹配; 面形实验
中图分类号: TN 247 文献标志码: A doi: 10.3969/j.issn.10055630.2015.05.005
Abstract:The projection method, that is a method of 3D surface profile detection based on the combination of linear structured light scanning measurement and stereoscopic vision measurement, can detect the surface profile of optical component online quickly and accurately. In this paper,an image processing algorithm is presented including preprocessing, areabased stereo matching, curve fitting and surface characterization testing, to recover the surface profile model of optical component. The results of the experiments show that this method can reconstruct the threedimensional exterior characteristics of the optical component truly and accurately. Therefore, the research is feasible and has research value.
Keywords: surface characterization inspection; image preprocessing; areabased stereo matching; surface characterization experiment
引 言
在光学仪器制造领域中,准确地检测和评定光学元件面形对提高光学元件加工表面的质量,研究光学元件表面的几何特性,探究光学元件的使用性能等都有着至关重要的意义。依据透镜面形检测理论,搭建实验平台并利用MATLAB和VC++软件进行重建模拟。
1 测量原理
本文采用基于投影的检测方法[14],原理如图1所示,线结构光垂直入射被测光学元件表面形成全反射,立体视觉系统采集多组线结构光全反射图片,通过MATLAB及VC++软件对原始图片进行图像处理,进而重建光学元件的三维面形,算法流程如图2所示。
2 图像预处理
由于受到外界环境,人为因素的多种干扰和限制,实验采集到的原始图片并不能直接应用,需要进行图像滤波和直方图均衡化处理,目的是为了去除噪声影响和平衡图像对的亮度差异。滤波后的图像对如图3所示,直方图均衡化的图像对如图4所示。
3 基于区域的立体匹配分析
3.1 匹配原理
本文采用区域立体匹配[57],原理如图5所示。假设一个像素点的邻域像素点和该点具有相同的视差,在基准图左图上选择一点P(x,y)作为待匹配点,以该点的像素坐标作为中心点,选择尺寸大小为W×W匹配窗口,此时在右图中以d为搜索范围计算同一极线上P(x,y)与P′(x+i,y)(i=1,2,…,d)的相似度,P′(x+i,y)(i=1,2,…,d)中的每个点跟P(x,y)一样都要创建一个大小为W×W的像素邻域,计算左右两幅图像中窗口包含的灰度值之间的相似性差异,用相关函数来表示,当两幅图像的一致性度量达到最大值,就认为与点P(x,y)匹配成功,匹配过程如图6所示。
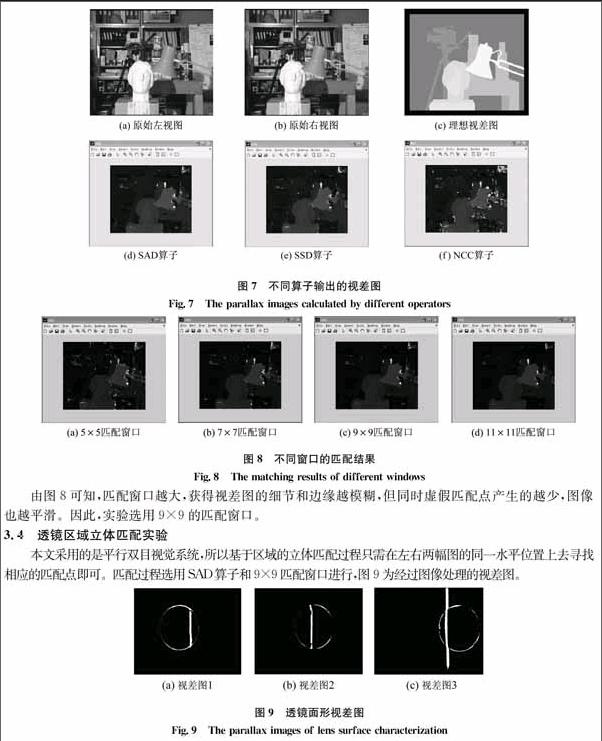
实验选取9×9的匹配窗口,采用TSUKUBA提供的立体图像对来分析这三种不同算子得到视差图的差异。如图7(a)、(b)所示为原始图像对,输出的理想视差图如图7(c)所示,不同算子得到的视差图如图7(d)、(e)、(f)所示。将不同算子得到的视差图与理想视差图进行比较可知,SAD算子得到的视差图精确度略高于SSD算子和NCC算子,且该算子匹配速度较快,故本文实验选用SAD算子进行立体匹配实验。
3.3 匹配窗口分析
较为常用的区域立体匹配窗口有5×5、7×7、9×9、11×11。匹配窗口越小得到的视差图细节轮廓越清晰,但同时产生的杂点较多,在视觉上有破碎感;匹配窗口越大得到的视差图整体平滑性较好,但细节轮廓较模糊。
实验选取SAD算子,仍然采用TSUKUBA提供的立体图像对来分析不同匹配窗口得到视差图的差异,如图8(a)、(b)、(c)、(d)所示。
由图8可知,匹配窗口越大,获得视差图的细节和边缘越模糊,但同时虚假匹配点产生的越少,图像也越平滑。因此,实验选用9×9的匹配窗口。
3.4 透镜区域立体匹配实验
本文采用的是平行双目视觉系统,所以基于区域的立体匹配过程只需在左右两幅图的同一水平位置上去寻找相应的匹配点即可。匹配过程选用SAD算子和9×9匹配窗口进行,图9为经过图像处理的视差图。
4 曲线拟合
用单一像素提取视差图中圆环的坐标点,通过最小二乘法对这些坐标点进行圆拟合获得圆心坐标以及圆半径,拟合结果如图10所示。为了方便进行三角剖分,还需要将图10中的拟合图进行叠加,叠加结果如图11所示。
5 光学元件面形实验
5.1 光学元件三维模型重建实验
在曲线拟合过程中,已用单一像素提取了视差图中圆环和曲线的多个二维平面坐标点,为了真实还原透镜面形,还需进行三维空间坐标点的计算,由于本文搭建的实验平台是平行放置的双目立体视觉系统,故采用平行双目立体视觉系统的三维空间点坐标计算方法[8]来进行二维平面坐标点到三维空间坐标点的转化。
将得到的三维空间离散坐标点进行Delaunay 标准的BowyerWatson三角剖分算法[910]来实现透镜的三维面形还原,剖分过程如图12所示,并在VC++环境中使用OpenGL库,绘出了三维立体透镜模型图像如图13所示。如图14给出了在MATLAB环境中还原出来的透镜表面的微观情况。
5.2 Taylor Hobson轮廓仪实验
Taylor Hobso轮廓仪是通过仪器的触针在被测物表面滑移来进行检测的,可以直接按某种评定标准读数或描绘出表面轮廓曲线的形状,通过Taylor Hobso轮廓仪检测该透镜,其一维面形图如图15所示,透镜轮廓图如图16所示。
5.3 ZYGO干涉仪实验
ZYGO干涉仪是目前非接触式检测光学元件面形较为成熟的实验仪器,能够还原被测光学元件的一维及三维面形图,可计算出光学元件表面最大波峰值与最小波谷值之差的PV值和均方根误差(RMS)值,其强度图如图17所示,一维面形图如图18所示,三维面形图如图19所示。
5.4 实验结果及结论
投影法实验对口径14 mm,曲率半径13 mm的球面镜进行的检测,通过VC++环境进行三角剖分,得到了透镜面形的立体三维图形,同时利用MATLAB软件还原出透镜表面的微观情况,并计算出评价透镜表面面形的重要参数——PV值和RMS值。
Taylor Hobso轮廓仪和ZYGO干涉仪检测光学元件面形的技术在现阶段来说已经比较成熟,所以将投影法的检测结果与这两种检测仪的检测结果比较即可验证该检测方法的可行性。如表1所示可知,投影法与Taylor Hobso轮廓仪、ZYGO干
涉仪的检测结果中,PV值及RMS值之差约为0.01 μm,对于一个口径较小的透镜来说,这样的结果是较为理想的,其结果与Taylor Hobso轮廓仪、ZYGO干涉仪的检测结果精度较为接近,这样就验证了结构光投影法检测光学元件的方法是可以满足通常的检测要求,具有一定的可行性。
6 结 论
本文提出的投影法光学元件面形检测技术,克服了传统检测方法中对外界环境要求严格的诸多不足之处。实验显示,该方法能够检测还原光学元件三维外貌特性,但后期仍需进一步优化图像处理算法,提高检测精度。
参考文献:
[1]孙国强,许增朴.用于产品造型设计的三维反求测量系统的研究[D].天津:天津科技大学,2007.
[2]王晓林,陈伟民,黄尚廉.光切法三维轮廓测量的原理及其应用[J].光学技术,1997,3(2):3943.
[3]陈江.二目立体视觉测量系统关键技术研究[D].南京:南京航空航天大学,2006.
[4]高文,陈熙霖.计算机视觉—算法与系统原理[M].北京:清华大学出版社,1999.
[5]达飞鹏,盖绍彦.光栅投影三维精密测量[M].北京:科学出版社,2011.
[6]HIRSCHMULLER H.Improvements in realtime correlationbased stereo vision[J].IEEE Workshop on Stereo and MultiBaseline Vision.2001,141148.
[7]刘瑜,刘缠牢,苏海.一种基于结构光双目视觉的特征匹配算法研究[J].光学仪器,2014,36(2):161166.
[8]何勇.双目视觉的车辆场景三维重建方法研究及应用[D].合肥:合肥工业大学,2009.
[9]程晓亮.基于双目立体视觉的三维重构研究[D].哈尔滨:哈尔滨工业大学,2006.
[10]WATSON D F.Computing thendimensional Delaunay tessellation with applications to Voronoi polytopes[J].The Computer Jourmal,1981,24(2):167172.
(编辑:张 磊)