道路通行行为研究进展及其展望
2016-01-08 04:35:59石建军,李鹏飞,刘小明等
交通信息与安全 2015年2期
道路通行行为研究进展及其展望*
石建军1▲李鹏飞1刘小 明1,2李文芳1
(1.北京工业大学北京市交通工程重点实验室北京 100124;2.中华人民共和国交通运输部北京 100736)
摘要道路通行行为是交通行为领域重要的研究热点,文中系统梳理了道路通行行为的学术研究现状、存在问题、研究方法及发展前景。阐述了道路通行行为的定义,分析比较了通行行为与驾驶行为、驾驶员行为的区别和联系。提出将道路通行行为分为基本通行行为、攻击性通行行为、路径选择行为以及竞争与协作通行行为四部分,总结了国内外道路通行行为发展现状,分析了存在问题,并对其未来发展趋势进行了展望。为改善道路通行行为研究方法,针对道路通行行为的多种交通行为特点,提出了适用于道路通行行为的研究方法和手段(时空法、实验法和模拟仿真),探讨了各研究方法的应用现状、优缺点、以及在不同研究阶段的适用性。最后对道路通行行为的发展趋势进行了探讨并提出了建议。
关键词交通行为;道路通行行为;交互车辆;车辆轨迹;实验;模拟仿真
中图分类号:U491.3文献标志码:A
收稿日期:2014-06-30修回日期:2014-09-04
通讯作者▲第一作者()简介:石建军(1962-),硕士,副教授.研究方向:交通行为与控制.E-mail:jjsb@bjut.edu.cn
*“973”国家重点基础研究发展计划项目(批准号:2012CB723303)资助
Progress and Prospect of Research on Road Traffic Behavior
SHI Jianjun1LI Pengfei1LIU Xiaoming1,2LI Wenfang1
(1.KeyLaboratoryofTrafficEngineering,
BeijingUniversityofTechnology,Beijing100124,China
2.MinistryofTransportofthePeople'sRepublicofChina,Beijing100736,China)
Abstract:The road traffic behavior is an important research focus in the field of traffic behaviors. This paper reviewed and summarized the academic situation, existing problems, research methods and development prospects of the road traffic behavior. The road traffic behavior is defined. The difference and relation among the driving behavior, the driver behavior and road traffic behavior is analyzed. The road traffic behavior includes four sections: the basic traffic behavior, aggressive traffic behavior, route choice behavior and competition/cooperation traffic behavior. This paper analyzed the research situation on each category, illustrate the existing problems, and expound the research trend in road traffic behavior. In order to improve the method of road traffic behavior research, based on varieties of traffic behavior characteristics of traffic behavior, the appropriate research methods and means (space-time method, experimental and simulation) were proposed. The role of different research stage was discussed from its advantages, disadvantages and applicability. The future development trend and suggestions of the road traffic behavior are proposed. This paper developed a framework of road traffic behavior, and the future development trend was discussed.
Key words:traffic behavior; road en-route behavior; interactive vehicle; vehicle trajectory; experiment; simulation
0引言
随着中国城镇化、机动化进程不断加快,交通拥堵、通行效率低下、事故风险增加成为困扰各大城市的交通难题。研究表明,不同的道路通行行为对通行效率、事故风险和能耗排放有较大影响。直观来说,每1次车辆运动的执行都会干扰交通流的正常运行,增加交通整体运行的不稳定性。Zhao等[1]对多步式挤压换道(multistep approaching lane changing,MALC)和普通换道(normal lane changing,NLC)进行了研究对比,结果表明MALC比NLC持续时间增加6.7 s,速度降低14 km/h,影响车辆数增加6辆,影响交通流的正常运行。根据德国NVENT-FAS协会公布的道路交通事故主要原因分析报告,在车辆行驶过程中并线或车道变换和驶离车道2种行为造成的事故占总事故率的28%和15%[2]。车辆间竞争式通行行为使得驾驶人为了争夺速度、空间领先优势而进行频繁的加速和减速,Holmen等[3]分析了驾驶行为参数(车速、行驶距离等)对的CO,Nox,HC尾气排放的影响,研究表明车辆的加减速的变化强度直接影响汽车尾气的排放;Rakha等[4]研究发现车辆加速会增加CO和HC的排放,而减速的影响相对较小。
车辆在城市交通系统中的通行行为决定了城市路网的通行效率、交通安全和能耗排放水平,是城市顺畅交通决定性因素之一。目前道路通行行为研究多集中在跟驰、换道、分合流点等的车辆运动表现方面,缺少在不同社会文化、道路环境下车辆间为争夺道路资源而进行的个体与群体、群体与群体的道路通行行为研究,以及由此导致的交通运行效率、交通安全、尾气排放等影响研究。因此,笔者从道路通行行为的概念开始,阐述了道路通行行为区别于驾驶行为、驾驶人行为的研究特点,明确了道路通行行为的研究内容,结合目前研究进展和成果,提出道路通行行为研究的主要方向和发展趋势,在此基础上提出适用于道路通行行为的研究方法。
1道路通行行为概念
道路通行行为是驾驶人驾驶机动车交通工具实现出行目标过程中与其他车辆交互的行为表现,简称通行行为。通行行为与驾驶行为、驾驶人行为同属交通行为研究范畴,但在侧重点上存在明显差异。不同研究者对驾驶行为和驾驶人行为两者的概念存在认识上的不同[5-6]。因此,在阐述通行行为之前,应该先明确驾驶人行为、驾驶行为、通行行为的概念,以及三者之间的区别与联系,见表1。
驾驶人行为主要研究驾驶人在不同驾驶条件(如疲劳、饮酒、药物等)所表现出的行为特性,是个体类型交通行为的研究,常常涉及驾驶认知、技能、感觉、学习等;驾驶行为则描述的是车辆在不同交通环境下的运动规律,是从物理学的角度对车辆运动规律进行研究,但缺乏目标车辆对其它车辆的影响机理研究。通行行为由驾驶行为发展而来,在驾驶行为的基础上有了更广的外延和更深的研究。通行行为的研究对象为交互的车辆行为,突破了原有驾驶行为以人-车单元作为研究对象的局限,同时研究对象不涉及驾驶人的个体认知、感觉、技能等。因此,通行行为研究对象具有以下4个特点。

表1 驾驶人行为、驾驶行为和通行行为比较
1) 驾驶人的车辆工具。通行行为研究强调人的能动性和车辆的工具性。在驾驶过程中人承担信息的感知、处理、决策以及执行过程,车辆是1种工具,具有物质、能量和信息特征。当汽车发展到自动驾驶阶段,以车辆正常行驶为目的的驾驶人操作行为将消失,也就无通行行为。
2) 特定交通环境。通行行为的研究是在特定的交通环境中进行的,包括社会环境、道路交通环境和自身环境3个方面。
3) 车辆间的交互行为。道路通行行为主要研究关系型交通行为的表现。在道路车流量小时,车辆之间的距离大,运行自由度大,其行为仅受到道路交通环境的制约,不作为通行行为主要研究对象,其与车辆跟驰行为的界定类似[7]。
4) 个体取得资源最优。在道路资源有限的条件下,驾驶人都是以自身能够更快、更安全的通行为目的的,不同是达到目的所使用的行为方式。驾驶人之间为追求空间、速度上的优势而相互竞争,在不断的博弈过程中达成平衡条件。
通行行为从行为学角度研究车辆间的交互行为规律以及信息对驾驶人的影响,是关系型交通行为的研究。因此通行行为在研究内容上分为2个方面:①道路上人所驾驶的车辆间的交互进程,包括个体、群体行为研究,个体与群体行为研究,群体与群体行为研究;②信息对驾驶人路径选择行为影响研究。
2道路通行行为研究内容
道路通行行为借助跟驰行为、换道行为、分合流行为等典型的驾驶行为研究发展而来。按照车辆行为表现和驾驶人心理情境可以将其分为基本通行行为、攻击性通行行为、路径选择行为以及竞争和协作通行行为。
2.1基本通行行为
跟驰、换道和超车行为是通行行为中最基本的行为表现。基本通行行为的研究有助于深入了解道路交通流特性,对于通行能力、交通安全、交通仿真等方面的分析有着重要意义。
1) 跟驰行为。跟驰行为作为通性行为的基础,经过60年的发展取得了丰富的研究成果。从最初的基于车辆运动学特性发展的刺激-反应类模型和安全距离模型,到后来讲认知心理学理论引入跟驰模型形成心理-生理类模型,再到20世纪90年代Bando等[8]提出的优化速度模型,随后学者相继提出智能驾驶模型、元胞自动机模型,进一步完善了跟驰行为的研究。近几年,学者将重点集中在跟驰行为与换道行为的融合,以及驾驶人个体特性对跟驰行为的影响方面:何兆成[9]等在优化速度模型的基础上,考虑车辆横向分析提出超车期望概念,将车辆跟驰行为与换道超车期望进行了综合考虑;曾友志等[10]考虑驾驶人扰动风险偏好异质的影响,认为前车与跟驰驾驶人扰动风险偏好系数比值越小,越有利于抑制扰动的传播和交通堵塞的形成;吉林大学金盛[6]在博士论文中基于驾驶员视觉注意特性建立了车辆跟驰模型;Jin[11]等通过侧向偏移跟驰模型分析了不同车道宽度对车辆跟驰行为的影响。以往的研究一般仅约束于1种类型的交通信息,或是车辆位置,或是速度差和加速度差信息。不同的交通流状态和道路环境导致不同的跟驰行为。现有大多数研究成果主要集中在单车道领域,然而将现有跟驰模型直接应用到2车道或多车道仍面临重要挑战。
2) 换道行为。与跟驰行为相比,换车道行为驾驶人的决策过程更加复杂,也更难于描述。Gipps[12]首次提出换道模型决策结构框架,之后的换道模型研究总的结构近似,只是在一些模型细节上有所区别。Troutbeck等[13]研究发现“间隙争夺”和“优先共享”行为;Hidas[14]将换道行为分为3种类型:自由换道、合作换道和强制换道。Ben-Akiva等[15]在NGSIM报告中基于强制换道行为提出了合作与竞争换道模型。Sun[16]综合考虑了驾驶人特性和不同驾驶场景对换道行为的影响。国内学者主要针对我国驾驶人特性进行换道行为研究,魏丽英等[17]采用元胞自动机模型研究了城市混合交通流下的车辆换道行为。刘小明等[18]提出应用动态重复博弈原理建立换道模型。车路协同环境下换道行为的交互建模也是研究热点,李珣等[19]针对未来车路协同环境所提供的车辆交互基础信息,提出了1种考虑局部区域车辆状态优化的协同换道模型。现有换道模型多针对高速公路建立,不能准确的反映城市道路的换道行为。在拥挤条件下,城市道路换道行为受驾驶人特性影响较大,但目前缺乏城市道路驾驶人换道特性、驾驶偏好及车辆交互过程研究。因此,未来换道行为研究需着重考虑换道过程中车辆之间的交互与博弈过程,同时完善驾驶人换道行为特征数据采集,使之能够更加真实反映现实交通特性。
3) 超车行为。超车行为指车辆在双车道或多车道道路上借用左侧或逆向车道进行超车行驶的交通行为。1938年,Matson和Forbes[20]提出了基于超车开始和结束条件的超车过程划分方式。柏伟等[21]将超车过程分为超车、换道、并道3个阶段,建立了1种新的超车模型。研究者将超车行为看成是换道行为的1种,区别只在于双车道公路和高速公路2种超车环境的不同。
从车辆表现看超车行为确实是2次换道行为的组合,超车行为研究可超车间隙和可回车间隙,与换道行为的可接受间隙类似,但是驾驶人在执行超车和换道行为时的需求、动机是不同的,产生2种截然不同的道路资源占用形式。
(1) 超车需求。①对期望车速的需求,当快车处于慢车后面时,快车希望保持自己的期望速度便产生了超车需求;②安全需求,驾驶人在感知潜在危险条件下会进行加速、减速、换道、超车等相应的行为。例如,当某一小汽车跟随在大货车后面时,由于视野的遮挡和大型车速度的限制会对后方小汽车驾驶人造成环境和心理上的不安全感,从而产生超车需求。
(2) 超车动机表现为对速度领先优势的占有,超车时借用内侧或对向车道完成超车行为,在超越待超车辆后返回原车道,但并不是为了争夺和长期占用道路资源,而换道行为则可能对内侧车道进行长时间的资源占用,影响其他车辆的快速通行,降低道路的通行效率。
因此,超车行为在行为需求、动机、行为表现上都区别于换道行为,不能将超车行为简单的看成2次换道行为的叠加,需要针对此行为进行专门、细致的研究。
2.2攻击性通行行为
随着机动化水平的提高,路怒症、攻击性驾驶成为人们熟悉的词汇,这些行为威胁道路车辆安全。攻击性通行行为是1种危害或倾向危害人身财产安全的行为方式,其表现为:超速驾驶、追尾、从右侧超车、闯红灯、大声鸣笛等[22],行为表现从低到高可分为心理愤怒,言语、肢体表现,极端暴力行为。骆勇等[23]对攻击性驾驶行为的产生机理进行研究,分析了挫折、个人、环境因素对攻击性驾驶行为的影响。Iversen等[24]研究发现在交通安全方面,驾驶人态度能够较好的预测未来驾驶员的风险行为。Efrat等[25]基于计划行为理论对攻击性行为进行了预测,结果表明该理论能很好的预测驾驶员攻击意图。从行为学角度来讲,攻击性通行行为是个体对群体的1种行为,是驾驶人1种有意识的行为,具有恶意性、伤害性和指向性的特点[15],不同于竞争式通行行为。攻击性通行行为在行为识别、测量方面比较困难,主要通过调查问卷、行为量表的方式进行研究。攻击性通行行为的研究涉及驾驶人的态度、意图、主观规范等方面,需要一定的心理学知识。国外采用的驾驶人行为量表为Blanchard等[27]编制的“Larson Driver′s Stress Profile”。而国内一般从国外翻译而来,在适用性、准确性上可能存在差异。并且现有研究多从定性的角度对攻击性通行行为进行分析,未作深层次的定量分析,难以在实际中应用。
2.3路径选择行为
基于时间序列可以将驾驶人1次出行分为3个步骤:出行活动准备、道路交通出行、交通出行回报[28],见图1。路径选择行为研究信息对驾驶人通行行为决策的影响[29]。干宏程[30]采用问卷调查方法探索了可变信息标志(VMS)同时提供快速路以及替换路径行程时间条件下的路径选择行为,对影响因素进行了多变量分析,建立了路径选择二元probit模型。徐天东等[31]研究表明VMS发布路径交通信息的精确性、完整性、驾驶人的个人属性是影响路径选择行为的主要因素。赵凛等[32]研究表明"前景理论"在描述出行者的路径选择行为时能够在一定程度上克服"期望效用理论"的不足,可以较准确地刻画出行者在不确定性条件下的路径选择决策行为。张波[33]基于前景理论在有限理性框架下进行研究了出行者的动态路径选择行为。
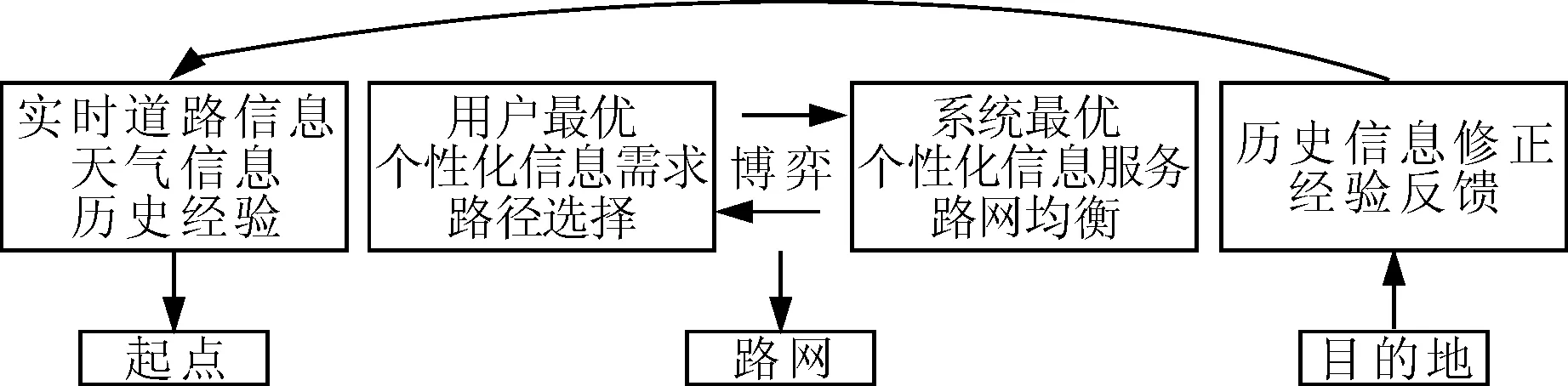
图1 出行者出行过程示意图
现阶段城市交通控制中心依靠浮动车数据、视频检测数据等手段可以准确、及时的获得城市道路的交通状态,却无法为交通个体提供个性化的信息服务,形成信息需求与供给矛盾。道路交通系统中的出行者追求的是用户最优,而管理者追求的是系统最优,这就形成了1个博弈问题。在出行中,驾驶人个体获得的交通信息有限,无法动态优化路径选择。通常情况下,驾驶人接受到信息的是准完备动态交通信息,需要对信息品质进行认知、判别和决策,建立驾驶人个体的行驶路径。交通控制信息的最终目的是均衡路网中时空资源,缓解交通供需矛盾,而如何准确的分析驾驶人对准完备交通信息的认知与决策过程则是路径选择行为的研究重点。驾驶人作为道路交通系统的核心,是1个有独特思维的复杂个体。在整个出行过程中驾驶人根据所获得的交通信息不断地改变自己的出行路径,研究驾驶人在路径选择行为上的个人偏好,全面考虑驾驶人行为特性,建立准确的路径选择行为模型,有助于交通控制方案的制定。
随着现代信息科学技术的发展,建立在交通云计算基础上的交通信息中心具有强大的计算和存储能力,在车辆物联网环境中,能够为道路网络上所有车辆的行驶路径进行优化安排,实现均衡路网交通。在优质的路径诱导和信任的基础上,路径选择行为的研究将集中在车辆行驶路径安排问题和车辆路径选择行为控制装置2个方面。
2.4竞争与协作通行行为
竞争与协作通行行为是指交通实体在道路交通环境中为实现快速通行的目的,与其他交通实体所展开的争夺速度、空间领先所表现出来的驾驶行为,主要指竞争与协作。
从行为学角度讲,竞争与协作通行行为是社会文化、道德约束在交通层面的反映,属于个体与群体、群体与群体之间的1种行为,破窗效应和从众心理[19]深刻影响着驾驶人在道路交通环境中的行为表现。由于周围环境、社会文化以及自身道德水平等原因,形成了我国道路交通的竞争式通行行为和发达国家的协作式通行行为的差异。诸多学者已经开始此方面的研究,如合作换道、强制换道、竞争换道等,但由于文化、地域的差异没有系统的对竞争与协作通行行为展开研究。竞争与协作通行行为的研究从个体和群体两个角度进行。
从个体角度,基于驾驶人行为分类提取不同道路环境驾驶人的行为特征,研究交叉口、快速路出入口等易发生竞争通行行为的地点车辆之间的交互、决策行为。现有驾驶行为决策模型多是将驾驶人面向交通冲突时的行为决策简化为“1次决策”,缺乏对车辆交互过程中不同驾驶人行为决策间相互影响的分析。基于上述原因,在通行行为研究时应深入分析车辆行为特征,利用动态重复博弈理论、多Agent的行为决策理论等方法对车辆交互模型进行研究,以使该模型与实际驾驶人行为更加一致。
从群体角度,利用调查、轨迹捕捉、仿真等手段研究竞争与协作通行行为的产生原因、影响因素等,基于竞争与协作行为模式下所建立的车辆交互模型,研究两类行为在道路通行能力、交通安全和能耗排放的差异,综合比较竞争与协作行为的优劣,可以为交通控制与管理和提升道路安全设施设计提供依据。
3道路通行行为研究方法
道路通行行为的研究方法主要有时空法、实验法和模拟仿真,见图2。时空法主要用于获得车辆的运动轨迹,是道路通行行为研究的基础,用于研究车辆交互行为规律;实验法是为了去除过多的干扰,研究单一因素对通行行为的影响,目的是建立通行行为模型;模拟仿真可以方便的实现现实中所不能进行的研究,利用通行行为模型进行交通仿真,可以对车辆交互行为规律进行验证,对模型进行修正。

图2 通行行为研究方法
3.1时空法
通行行为研究车辆在行驶过程中车辆间的交互行为,表现为车辆在道路交通环境中的时间与空间维度上的变化,为了获取直接、精确、不受干扰的车辆通行行为基础数据,采用样本观察和事后判断相结合的方法,通过研究驾驶人在客观道路环境下的借助车辆所表现的行为轨迹来提取通行行为规律。图3所示为几种数据调查方法的比较,视频轨迹方法显示出明显的优势。
目前供研究者使用的轨迹提取软件较多,如表2所示。大部分软件都采用人工点选的方法提取车辆轨迹,不能自动的进行车辆的识别、跟踪和提取。PETS(Performance Evaluation of Tracking and Surveillance)主要进行计算机图像识别、事件检测以及性能评价方面的研究,具体包括个人和车辆跟踪、数量和密度检测、事件检测等。该技术的发展可应用于视频中车辆的识别、跟踪、以及换道超车等事件的自动化识别,为通行行为规律的研究提供丰富、精确的基础数据。
视频轨迹方法具有精度高、覆盖范围大等优点,在交通行为的研究中是最常用的研究方法,但有1个不可避免的问题:拍摄平台。理想的拍摄平台应有足够的高度且垂直于观测道路,但是现实环境提供的允许条件较少,造成轨迹数据提取存在一定的误差。美国联邦公路局在NGSIM中利用高速公路旁的高层楼房架设拍摄平台,获得了精确的车辆视频资料。无人飞行器平台不受道路条件的约束,可以正摄于道路上方进行视频资料的获取,平台抖动也可以通过云台的自稳系统解决,现有问题在于飞行时间过短,一般飞行时间在15 min左右,难以进行长时间的观测。因此,在采用时空法进行视频资料拍摄时要根据自己的需求进行取舍。

图3 数据调查方法比较 [20]
3.2实验法
时空法是基于现实道路环境所进行的,获取的是复杂交通环境下的车辆运行特性,其影响因素较多,不便进行行为规律研究。因此,在调查的基础上研究者应重视实验的研究方法,形成通行行为独有的实验研究。

表2 车辆轨迹提取软件
实验法是指在真实的道路交通环境中,通过改变道路环境获取车辆行为的变化,从而研究车辆通行行为的基本规律。在实验中,首先应明确实验的目的,确定实验过程中的具体分析对象和要求,确定实验方案,然后采集并分析获取的车辆运行参数,最终获取所需要的结论。道路交通环境较为复杂,同时又有驾驶人因素的影响,因此在实验中除了自变量因素的改变,应尽量去除实验场景中环境的变化。真实环境实验的最终目的是建立准确、恰当的通行行为模型,为下一阶段的计算机仿真提供理论支撑。
图4为快速路入口2种不同的布置形式。图4(a)仅在入口采用画线表示车辆行驶方向,通过现场观察发现,当入口流量较大时,不满足排队等待现状的车辆②就会冒险强行汇入主线,与车辆①发生路权争夺行为,可能引发不安全后果。图4(b)在入口处除了画线还设置了硬隔离设施,强制车辆在入口处形成队列依次汇入主线,提高交通安全。分析2种场景对驾驶人的影响,比较车辆在不同流量、速度、车型下表现出来的通行行为,研究其行为规律,有助于深入理解道路布置形式对交通安全和通行效率的影响,对道路通行能力研究和道路形式设计具有重要意义。
为了在短时间内取得满足要求的数据,实验的进行需要投入较多的人力、物力,有时会涉及到道路设施的更改,需要相关部分的配合,实验的实施较为麻烦,因此,适用性受到较大限制。

图4 不同快速路入口布置形式下的车辆行为示意图
3.3模拟仿真
随着计算机科学与技术的发展,计算已成为继实验和理论之后第3种学科类形态[36]。信息技术的进步使得计算机可以模拟真实处理问题的实验场景或人的思维过程来解决许多问题。在通行行为研究方面,模拟仿真主要表现在2个方面.
1) 虚拟交通情境。利用虚拟现实头盔显示器、驾驶模拟器、动作捕捉等设备,设计研发通行情境设置调度系统,在计算机模拟交通流的背景下,实验人员通过驾驶模拟器制造不同的通行行为,用以干扰主被试者,即通过人-人交互研究通行行为,如图5所示。主被试者佩戴沉浸式眼睛进行模拟驾驶,通过动作捕捉设备VMSENS Mox、生/心理测量、眼动仪等输出实验数据。根据不同驾驶场景、不同交互干扰下的实验数据进行建模分析,进而对通行行为作出更为深入的研究。

图5 沉浸式眼镜和动作捕捉设备协同研究
2) 交通仿真。交通仿真是研究者接触最多的计算形式。近年来,由于新的计算手段和方式的提出,交通仿真不在局限于对模型稳定性、真实性的验证,更多的关注于动态离散事件和混合系统的行为模拟。基于计算实验理论,相关学者提出了实验交通工程学和人工交通系统的概念[37]。未来通行行为的研究将不局限于传统交通流理论的束缚,但是目前用于交通仿真系统的各个子系统的已有方法都可以直接用于下一代交通仿真系统的建模与构造,仿真系统构建的核心依旧是个体和群体行为学模型的构建以及实际交通系统的运行规律、方式、方法和各种约束条件,同时还必须客观地考虑文化和社会环境对于交通行为的影响。此外交通仿真还应具有实时信息插入功能,能够模拟交通流在交通事故等突发情况车辆的运行状态以及驾驶人在信息发布、诱导条件下的运行规律。
根据计算实验和计算智能的最新进展,实现下一代交通仿真系统的新方法包括:智能体方法与编程技术;Petri网及其衍生模型;复杂系统的语言动力学描述;元胞自动机及其广义形式;模糊逻辑、神经元网、遗传演化程序和自然计算在内的智能计算方法。
模拟仿真相比上述2种研究方法,不存在拍摄平台、道路设施更改等问题,只要研究者制定了相应的行为规则,就可以进行交通的模拟与仿真,受到越来越多研究者的重视。然而模拟仿真的进行是以精确的交通行为模型为基础的,否则就会出现“仿而不真”的尴尬。
4结束语
当前道路通行行为研究主要集中在驾驶行为方面,以人-车单元的车辆运动表现为研究对象,属于个体型交通行为的研究。现有研究忽略了车辆是在具体的道路环境中行驶,车辆在正常行驶过程中不可避免的要与周围车辆、环境发生交互行为。
本文针对研究存在的不足,建立道路通行行为研究体系,确定其研究对象为道路环境中交互运动的车辆,明确道路通行行为的主要研究内容,结合计算机图像识别、虚拟交通情境以及计算实验等技术,构建适用于道路通行行为研究的研究方法。
道路通行行为研究体系的构建,为通行行为的系统研究提供了理论支持。在今后的研究中,应深入研究不同社会文化、道路环境下车辆间为争夺道路资源而进行的个体与群体、群体与群体的交互行为,构建特定情境下的道路通行行为模型,在此基础上探讨通行行为模式与通行、安全、秩序、排放的关系,以期为管理者提供科学、准确的决策支持。
参考文献
[1]ZHAO Li,SUN Jian,ZHANG Michael H.Observations and analysis of multistep approaching lane changing behavior at two expressway merge bottlenecks in shanghai[C].Transportation Research Board 92ndAnnual Meeting,Washington,United States:Transportation Research Board,2013.
[2] 陈俊.基于DSP的汽车视觉系统研究[D].武汉:武汉理工大学,2009.
CHEN Jun.Research of automotive vision system based on DSP[D].Wuhan:Wuhan University of Technology,2009.(in Chinese)
[3]HOLMÉN B A,NIEMEIER D A.Characterizing the effects of driver variability on real-world vehicle emissions[J].Transportation Research Part D:Transport and Environment,1998,3(2):117-128.
[4]RAKHA H,DING Y.Impact of stops on vehicle fuel consumption and emissions[J].Journal of Transportation Engineering, 2003,129(1): 23-32.
[5]严新平,张晖,吴超仲,等.道路交通驾驶行为研究进展及其展望[J].交通信息与安全,2013,31(1):45-51.
YAN Xinping,ZHANG Hui,WU Chaozhong,et al.Research progress and prospect of road traffic driving behavior[J].Journal of Transport Information and Safety,2013,31(1):45-51.(in Chinese)
[6]金盛.考虑视觉注意特性的车辆跟驰行为建模[D].长春:吉林大学,2010.
JIN Sheng.Modeling of car following behavior considering visual attention performance[D].Changchun:Jilin University,2010.(in Chinese)
[7]何民,荣建,任福田.判定跟驰状态的研究[J].公路交通科技,2001,18(4):74-78.
HE Ming,RONG Jian,REN Futian.Study on car-following behavior recognition[J].Journal of Highway and Transportation Research and Development,2001,18(4):74-78.(in Chinese)
[8]BANDO M,HASEBE K,NAKAYAM A,et al.Dynamical model of traffic congestion and numercalsimulation[J].Physical Review E,1995,51(2):1035-1042.
[9]何兆成,孙文博.考虑横向分离与超车期望的车辆跟驰模型[J].物理学报,2013,62(10):465-473.
HE Zhaocheng,SUN Wenbo.A new car-following model considering lateral separation and overtaking expectation[J].Acta Physica Sinica,2013,62(10):465-473.(in Chinese)
[10] 曾友志,张宁,刘利娟.考虑司机扰动风险偏好异质的跟驰模型[J].物理学报,2014,63(6):378-384.
ZENG Youzhi,ZHANG Ning,LIU Lijuan.A new car-following model considering drivers′ heterogeneity of the disturbance risk appetite[J].Acta Physica Sinica,2014,63(6):378-384.(in Chinese)
[11]JIN S,HUANG Z Y,TAO P E,et al.Car following theory of steady-state traffic flow using time-to-collision[J].Journal of Zhejiang University:Science A,2011,12(8):645-654.
[12]GIPPS P G. A model for changing decisions[J]. Transportation Part B, 1986,20(5):403-414.
[13]TROUTBECK R J, KAKO S. Limited priority merge at unsignalized intersections[J]. Transportation Research Part A: Policy and Practice, 1999,33(3):291-304.
[14]HIDAS P. Modeling lane changing and merging in microscopic traffic simulation[J]. Transportation Research C,2002(10):351-371.
[15]BEN Akiva,CHOUDHURY M E,LEE C F,et al.Verification and validation plan:forced lane change and cooperative merging model[R].Massachusetts:NGSIM Group Report,,2006:1-5.
[16]SUN Jian.A lane-changing model for urban arterial streets [D].Florida USA:University of Florida,2009.
[17]魏丽英,吴荣华,王志龙,等.基于混合交通流的车辆换道行为[J].吉林大学学报:工学版,2014,44(5):1321-1326.
WEI Liying,WU Ronghua,WANG Zhilong,et al. Lane-changing behavior based on mixed traffic flow[J].Journal of Jilin University:Engineering and Technology Edition,2014,44(5):1321-1326.(in Chinese)
[18]刘小明,郑淑晖,蒋新春.基于动态重复博弈的车辆换道模型[J].公路交通科技,2008,25(6):120-125.
LIU Xiaoming,ZHENG Shuhui,JIANG Xinchun.Lane changing model based on discrete dynamic game[J].Journal of Highway and Transportation Research and Development,2008,25(6):120-125.(in Chinese)
[19]李珣,曲仕茹,夏余.车路协同环境下多车道车辆的协同换道规则[J].中国公路学报,2014,27(8):97-104.
LI Xun,QU Shiru,XIA Yu.Cooperative lane-changing rules on multilane under condition of cooperative vehicle and infrastructure system[J].China Journal of Highway and Transport,2014,27(8):97-104.(in Chinese)
[20]MATSON T M,FORBES T W.Overtaking and passing requirements as determined from a moving vehicle[C].18thAnnual Meeting of the Highway Research Board.Washington,United States:Highway Research Board,1938.
[21]柏伟,李存军.基于不同限速条件下的超车模型研究[J].交通运输系统工程与信息,2013,13(2):63-68,95.
BAI Wei,LI Cunjun.Overtaking model based on different limiting speed[J].Journal of Transportation Systems Engineering and Information Technology,2013,13(2):63-68,95.(in Chinese)
[22]TODD K H.Commentary:strategies to combat aggressive driving[J].Annals of Emergency Medicine,1999,34(6):800-801.
[23]骆勇,罗霞.道路交通中攻击性驾驶行为产生机理分析[J].交通运输工程与信息学报,2009,7(2):1-4,44.
LUO Yong,LUO Xia.Analysis of the aggressive driving for road traffic safety[J].Journal of Transportation Engineering and Information,2009,7(2):1-4,44.(in Chinese)
[24]IVERSEN H,RUNDMO T.Attitudes towards traffic safety,driving behaviour and accident involvement among the Norwegian public[J].Ergonomics,2004,47(5):555-572.
[25]EFRAT K,SHOHAM A.The theory of planned behavior,materialism, and aggressive driving[J].Accident Analysis and Prevention,2013,59(10):459-465.
[26]骆勇.道路交通中攻击性驾驶行为分析与研究[D].成都:西南交通大学,2009.
LUO Yong.Analysis and research of aggressive driving behavior at the road traffic[D].Chengdou:Southwest Jiaotong University,2009.(in Chinese)
[27]BLANCHARD BARTON E B,MALTA K A L.Psychometric properties of a measure of aggressive driving:the larson driver′s stress profile[J].Psychol.Reports,2000,87(3 Pt 1):881-892.
[28]石建军,李晓莉.交通行为控制的对象及其特性分析[J].交通运输工程与信息学报,2011(2):8-12,19.
SHI Jianjun,LI Xiaoli.Analysis of traffic behavior control object and its characteristics[J].Journal of Transportation Engineering and Information,2011(2):8-12,19.(in Chinese)
[29]秦梦阳,石建军.交通信息在出行行为中的影响研究[J].交通信息与安全,2012,30(2):58-61.
QIN Mengyang,SHI Jianjun.Traffic behavior under the influence of traffic information[J].Journal of Transport Information and Safety,2012,30(2):58-61.(in Chinese)
[30]干宏程.VMS诱导信息影响下的路径选择行为分析[J].系统工程,2008,26(3):11-16.
GAN Hongcheng.Exploring drivers′ route choice response to real-time guidance information of variable message Signs[J].Systems Engineering,2008,26(3):11-16.(in Chinese)
[31]徐天东,孙立军,郝媛,等.不同交通信息下网络交通动态路径选择行为[J].同济大学学报:自然科学版,2009,38(8):1029-1033.
XU Tiandong ,SUN Lijun,HAO Yuan, et al. Influence of different traffic information on drivers′ dynamic route choice behavior in urban road network level[J].Journal of Tongji University:Natural Science,2009,38(8):1029-1033.(in Chinese)
[32]赵凛,张星臣.基于“前景理论”的路径选择行为建模及实例分析[J].土木工程学报,2007,40(7):82-86.
ZHAO Lin,ZHANG Xingchen.A traveler route choice model based on prospect theory and case study[J].China Civil Engineering Journal,2007,40(7):82-86.(in Chinese)
[33]张波.基于前景理论的动态路径选择行为研究[D].上海:上海交通大学,2012.
ZHANG Bo.Research on dynamic route choice behavior based on prospect theory[D].Shanghai :Shanghai Jiao Tong University,2012.(in Chinese)
[34]吴超仲,万平,张晖,等.交通从众行为研究:机遇与挑战[J].交通信息与安全,2013,31(2):1-5.
WU Chaozhong,WAN Ping,ZHANG Hui,et al.Research on traffic herding behavior:opportunity and challenge[J].Journal of Transport Information and Safety,2013,31(2):1-5.(in Chinese)
[35]ROBERT H.,RICHARD M.,VASSILI A.Next generation simulation (NGSIM) high-level data plan[R].Washington,D.C.:FHWA-HOP-06-011,2004/2014.5.
[36]赵致琢.计算科学导论[M].3版.北京:科学出版社,2006.
ZHAO Zhizhuo.Introduction to computational science[M].3rdEdition.Beijing:Science Press,2006.(in Chinese)
[37]王飞跃.计算实验方法与复杂系统行为分析和决策评估[J].系统仿真学报,2004,16(5):893-897.
WANG Feiyue.Computational experiments for behavior analysis and decision evaluation of complex systems[J].Journal of System Simulation,2004,16(5):893-897.(in Chinese)
猜你喜欢
小猕猴智力画刊(2022年9期)2022-11-04 02:31:42
中学生数理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科学)(2019年6期)2019-10-10 01:01:50
江苏农业科学(2017年1期)2017-02-27 14:49:13
科技创新与应用(2016年36期)2017-02-21 19:19:12
发明与创新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
科技视界(2016年13期)2016-06-13 00:26:23
考试周刊(2016年22期)2016-05-06 19:14:34
科技资讯(2015年8期)2015-07-02 20:39:56