基于假设检验的电子巡航协同运行模式效能分析研究*
2015-05-08 09:11:34王茹军
交通信息与安全 2015年2期
王茹军 陈 俊 曹 阳 张 刚
(长江海事局 武汉430016)
0 引 言
电子巡航的出现很大程度上弥补了传统巡航的缺陷,为提高海事监管能力,实现监管现代化提供了坚强的保障,同时能够更好地为内河航运及沿江经济社会发展服务,加快畅通、高效、平安、绿色的现代化水运体系的建设,对我国构建现代综合运输体系、促进流域经济社会发展具有十分重要的意义[1]。
有学者[2-4]对电子巡航的技术架构、运行模式等进行了初步的探讨。整体而言,其特征及运行效率等问题还没得到广泛而深入的研究。现以武汉海事局电子巡航实施前后应用现状为例,运用假设检验进行效能分析,以深化对电子巡航运行模式的认识,促进其在海事监管中的应用。
研究电子巡航运行模式有助于充分发挥电子巡航系统的技术优势,促进电子巡航系统由建设期向发挥效益期发展,加快海事信息化发展和监管模式改革以及促进海事监管现代化、执法规范化[5]。
1 电子巡航运行模式
1.1 基本工作流程
电子巡航的主要工作内容可分为以下4个方面:①搜集和发布水文、气象、航道等通航安全信息,向船舶提供安全信息服务;②对辖区内船舶交通和通航环境进行巡航监控,尤其是对重点船舶的过程监控、重点水域的实时监控和重点时段的区域监控;③对辖区船舶交通秩序进行组织和维护,对船舶违章行为实施远程纠正,或指挥调动巡航救助执法大队到现场予以纠正;④协助开展水上事故及险情的应急处置及调查工作[6]。图1所示为某地方海事局电子巡航工作流程。

图1 某地方海事局电子巡航工作流程Fig.1 Electric patrol work flow of a local marine board
综合电子巡航工作流程现状[7-9],可将电子巡航工作流程分为以下4个阶段。
1)感知阶段。电子巡航值班人员通过系统平台监控,获取监管所需要的信息,包括水文、气象、船舶交通流等。
2)识别阶段。值班人员通过系统报警提示判断,识别需要进行执法干预的问题。
3)处置阶段。发现问题后,先通过VHF进行处置,对船舶交通秩序进行组织,要求行为人立即停止违章行为。在远程处置无效时,通过海巡艇巡航进行现场处置。
4)反馈阶段。在对所发现的问题进行处置之后,一方面要解除系统报警,另一方面需要对处置的过程、结果等内容进行记录备案,并反馈给上级,以便跟踪管理。
1.2 电子巡航运行模式划分
按照电子巡航实施主体的不同[10],可将电子巡航运行模式归纳为以下3类。
1)指挥中心运行模式。指挥中心运行模式中,各组织机构职责可概括为“指挥中心是实施主体,承担平台监控工作;海事处辅助实施,完成指挥中心分配的任务;执法大队保持巡航待命,根据指令实施现场处置”。
2)海事处运行模式。海事处运行模式中,各组织机构职责可概括为“指挥中心指导,海事处实施监控,执法大队保持巡航待命并实施指令巡航”。
3)执法大队运行模式。执法大队运行模式中,各组织机构职责可概括为“指挥中心指导,海事处监督,执法大队实施电子巡航和海巡艇巡航”。
根据对电子巡航3种运行模式的优缺点的综合分析可知,指挥中心运行模式因采取集中值班、统一监控的模式,具有值班人员配备要求较少、部门间协同指挥相对简单、运行程序顺畅、搜救应急行动高效等优点。从优缺点及适用情形看,与其他运行模式相比,指挥中心运行模式的优势明显[11]。
1.3 电子巡航协同运行模式
随着今后电子巡航系统功能及运行管理的进一步发展完善,电子巡航的运行趋向于采取统一的运行模式,以便于实现统一规范管理。在提出建议的电子巡航协同运行模式时,主要考虑不同运行模式优缺点、适用情形以及结合当前海事部门实施海事现场监管工作的组织机构及人力配置等因素。
当前海事各部门所承担的工作职责不同,由此对工作人员数量和素质的要求也不一致。如由指挥中心来承担电子巡航值班监控,因采取集中值班、统一监控的模式,对人员数量要求相对较少,同时指挥中心所配备的人员队伍具有较高的综合素质,专业技能扎实,工作责任心强,有利于充分发挥电子巡航各项监管效能。因此,从这个角度看,电子巡航宜采用指挥中心运行模式作为统一运行模式[12]。
2 电子巡航运行模式效能分析案例
2.1 研究假设与评价指标
判断电子巡航运行模式是否有效的本质在于判断监管效能是否有所提升,若该模式下电子巡航实施后海事监管高于电子巡航实施前,说明电子巡航运行模式有效,反之则无效。据此,本研究提出的核心假设为
H。电子巡航实施后海事监管效能>电子巡航实施前海事监管效能
为使本研究提出的假设能够得到实践数据的检验,即确定海事监管效能的可测量评价指标,选取了水上交通事故率、船舶违章率和远程纠正船舶违章率作为电子巡航实施前后海事监管效能评价的指标。
在确定评价指标的基础上,可进一步提出在核心假设H0下的3个子假设。
H1。电子巡航实施后水上交通事故率<电子巡航实施前水上交通事故率
H2。电子巡航实施后船舶违章率<电子巡航实施前船舶违章率
H3。电子巡航实施后远程纠正船舶违章率>电子巡航实施前远程纠正船舶违章率
显著性检验标准值α取0.05,即电子巡航实施前后某项评价指标的波动幅度超过0.05时,证明该假设有效。
2.2 样本及数据采集
为获得上述“船舶违章率”“远程纠正船舶违章率”和“水上交通事故率”3个指标的数据,选取了“船舶流量”“船舶违章行为总数”“远程纠违次数”和“水上交通事故总数”作为原始统计数据。
考虑到武汉海事局为长江海事局电子巡航试运行2个试点之一,电子巡航实施时间较长,管理工作成熟,故选武汉海事局作为分析指挥中心运行模式样本,电子巡航实施前取2009年7月~2011年6月间的数据,电子巡航实施后取2011年7月~2013年6月间的数据。

表1 武汉海事局电子巡航实施前后海事监管效能评价指标值Tab.1 Maritime supervision efficiency index before and after implementation of Wuhan Maritime Safety Administration%
2.3 效能分析结果
1)对子假设H1的验证及分析。本研究提出的子假设H1为:电子巡航实施后水上交通事故率<电子巡航实施前水上交通事故率,即对电子巡航实施前后水上交通事故率变化情况进行分析。
武汉海事局2009年7月~2013年6月4年期间,水上交通事故率整体上处于较低水平下的波动起伏状态,如图2所示。
电子巡航实施后水上交通事故率较电子巡航实施前降低9.68%,高于显著性检验标准0.05,因此本研究提出的第1个子假设H1成立。

图2 2009.07~2013.06水上交通事故率变化图Fig.2 Maritime accident change during 2009.07~2013.06
2)对子假设H2的验证及分析。本研究提出的子假设H2为:电子巡航实施后船舶违章率<电子巡航实施前船舶违章率,需对电子巡航实施前后船舶违章率的变化情况进行分析。
从电子巡航实施前后船舶违章率的变化情况来看,电子巡航实施前,船舶违章率平均值为5.39%,电子巡航实施后,船舶违章率平均值为5.43%,较实施前上升0.74%。
由于电子巡航实施后船舶违章率大于电子巡航实施前船舶违章率,因此本研究提出的第二个子假设H2不成立。
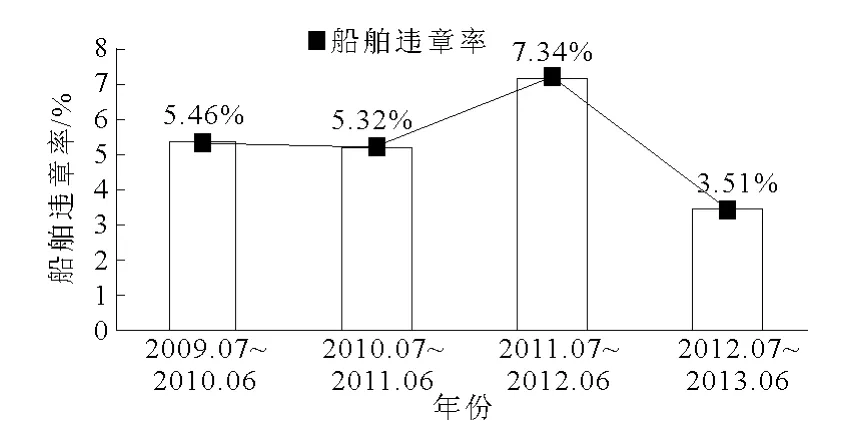
图3 2009.07~2013.06船舶违章率变化态势图Fig.3 Ship violation rate during 2009.07~2013.06
3)对子假设H3的验证及分析。本研究提出的子假设H3为:电子巡航实施后远程纠正船舶违章率>电子巡航实施前远程纠正船舶违章率。
武汉海事局电子巡航实施前,远程船舶违章率平均值为61.25%,电子巡航实施后远程纠正船舶违章率平均值为91.05%,较实施前上升48.65%。
因此,武汉海事局电子巡航实施后远程纠正船舶违章率(91.05%)要高于实施前远程纠正船舶违章率(61.25%),且增幅(48.65%)超过显著性检验标准0.05,故本研究的第三项子假设H3成立。

图4 2009.07~2013.06纠正船舶违章率变化图Fig.4 Ship violation correction rate during 2009.7~2013.6
4)对核心假设H的验证及分析。本研究的核心假设H为:电子巡航实施后海事监管效能>电子巡航实施前海事监管效能。由于子假设H1和H3成立而H2不成立,难以直接验证核心假设H是否成立,因此需要对3项子假设进行综合分析,得出电子巡航实施前和电子巡航实施后的海事监管效能分值。在计算海事监管效能分值时,采用简单加权 法[13](simple additive weighting method),将各项评价指标值与其权重值相乘并求和,最终得到海事监管效能的具体分值。
武汉海事局电子巡航实施前后3项评价指标值如表2所示。

表2 电子巡航实施前后各评价指标数据表Tab.2 Index data of maritime supervision before and after implementation %
考虑到各评价指标的数量级以及指标值的高低与评估结果的关系不一致[14]。因此需要对数据进行规范化处理,见表3。
由此可以得出 M1=(0.903,1.000,0.673)M2=(1.000,0.093,1.000)。根据专家调查法,得到3项评价指标之间的相对权重向量为

由加权求和原理,可计算电子巡航实施前和实施后海事监管效能的综合得分值如下。
1)武汉海事局电子巡航实施前海事监管效能综合分值:A1=M1·W=0.894。

表3 规范化处理的电子巡航运行模式有效性评价指标数据表Tab.3 Efficiency assessment index data maritime supervision before and after implementation
2)武汉海事局电子巡航实施后海事监管效能综合分值:A2=M2·W=0.998。
即有:电子巡航实施后海事监管效能>电子巡航实施实施前海事监管效能。
电子巡航实施后海事监管效能值(0.998)较电子巡航实施前海事监管效能值(0.894)上升11.6%,高于显著性检验标准值0.05。
由此可知,本研究提出的核心假设H成立,故电子巡航指挥中心运行模式有效。
3 结束语
通过对电子巡航运行现状的分析,归纳出3种电子巡航运行模式,其优缺点及适用情形分析结果表明,与其他2种运行模式相比,指挥中心模式优势较为明显,建议作为电子巡航的协同运行模式。
对所提出的电子巡航协同运行模式进行有效性分析,提出了该模式下电子巡航实施后海事监管效能大于电子巡航实施前海事监管效能的核心假设和该核心假设下的3个子假设,并通过选取评价指标和研究样本,对子假设一一进行验证,并计算电子巡航实施前后3个子假设的综合效能值,从而验证所提出的核心假设成立。
受电子巡航工作还有待完善、数据采集不完整等多种因素的影响,仅对指挥中心运行模式的有效性进行了验证,不同模式之间的相对有效性尚没有得到定量分析,应根据实际运行数据来进一步验证将指挥中心作为统一运行模式和合理性与科学性。今后,随着电子巡航的逐步完善,运行数据将得到统一记录和保存,在此基础上,可对不同模式进行相互之间的效能对比分析。
[1] 交通运输部.关于贯彻《国务院关于加快长江等内河水运发展的意见》的实施意见.交水发〔2011〕76号文[Z].北京:交通运输部,2011-03.Ministry of Transport.The opinions about implementing"Opinions of the State Council on accelerating the development of the Yangtze river and other inland water transportation".(2011)No.76[Z].Beijing:Ministry of Transport,2011-03.(in Chinese)
[2] 程家友.谈电子巡航在长江海事中的应用[J].中国海事,2013(2):42-44.CHENG Jiayou.On the application of electronic cruise in Changjiang MSA[J].China Maritime Safety,2013(2):42-44.(in Chinese)
[3] 余龙泉,熊 辉,孙 鹏.长江海事电子巡航系统的开发与实现[J].武汉交通职业技术学院学报,2012,14(4):9-12.YU Longquan, XIONG Hui, SUN Peng.Changjiang maritime electric supervision system design[J].Journal of Wuhan Technical College of Communications,2012,14(4):9-12.(in Chinese)
[4] 张 帆.基于扁平化管理理念的长江电子巡航运行模式研究[J].中国水运,2012(9):44-45.ZHANG Fan.Yangtze River Electric Supervision Operation Mode Research Based on Concept of Flat[J].China Water Transport,2012(9):44-45.(in Chinese)
[5] 白亭颖,朱勇强.e-Navigation发展研究[J].中国海事,2011(7):53.BAI Tingyin,ZHU Yongqiang.e-Navigation development research.[J].China Maritime Safety,2011(7):53.(in Chinese)
[6] 李学军.ECDIS在未来航海保障体系E-NAV中的作用[J].中国水运,2009,(8):11-13.LI Xuejun.The function of ECDIS in the future maritime security system E-NAV[J].China Water Transport,2009,09(08):11-13.(in Chinese)
[7] WANG Rongjie,ZHOU Haifeng.Application of SVM in Fault Diagnosis of Power Electronic Rectifier[C].WCICA 2008,USA:IEEE,2008,1256-1260.
[8] 张宝晨.论海事监管模式改革[J].中国水运,2009(9):9-11.ZHANG Baochen.Discussion about maritime reformation[J].China Water Transport,2009(9):9-11.(in Chinese)
[9] 王小明.浅析电子巡航及完善对策[C].中国航海学会内河海事委员会2013年度海事管理学术交流会优秀论文集.珠海:中国船海学会河海事委员会,2013.WANG Xiaoming.Analysis about electronic cruise and countermeasures[C].Maritime Management Academic Communication,Zhuhai,China:China Institute of Navigation River Maritime Commission,2013.(in Chinese)
[10] 黄锦标.内河海事监管模式探索[J].世界海运,2010(10):28-33.HUANG Jingbiao.Inland waterway supervision mode research[J].World Shipping,2010(10):28-33.(in Chinese)
[11] SPALDING J W,SHEA K M,LEWANDOWSKI M J.Intelligent waterway system[C].Proceedings of the 2002National Technical Meeting of The Institute of Navigation,San Diego:CA,2002.
[12] BRYAN K,CARTHEL C.An end-to-end maritime surveillance simulator prototype for the assessment of system effectives[C].Waterside Security Conference(WSS),2011:4-5.
[13] 刘克中,谭钦文,严新平,等.海事监控传感网络系统结构及功能研究[J].中国航海,2009(1):1-5.LIU Kezhong,TAN Qingwen,YAN Xinping,et al.Maritime surveillance sensor network system structure and function research[J].Navigation of China,2009(1):1-5.(in Chinese)
[14] 张 帆.融合VTS的长江电子巡航应用展望[J].中国水运,2013,13(6):53-54.ZHANG Fan.Yangtze River electric supervision fused with VTS application prospects[J].China Water Transport,2013,13(6):53-54.(in Chinese)
猜你喜欢
水上消防(2022年2期)2022-07-22 08:45:00
水上消防(2022年1期)2022-06-16 08:07:28
水上消防(2021年5期)2022-01-18 05:33:42
水上消防(2021年3期)2021-08-21 03:12:22
水上消防(2020年5期)2020-12-14 07:16:30
公民与法治(2020年17期)2020-10-27 02:27:52
小雪花·成长指南(2020年2期)2020-10-12 02:39:11
环球时报(2020-09-01)2020-09-01 09:33:45
水上消防(2020年3期)2020-07-25 02:36:32
珠江水运(2018年21期)2018-12-20 23:17:38