
锅炉燃烧器摆角控制问题分析
2015-12-30 05:15吴彦龙刘晓峰李仲明
电力安全技术 2015年5期
吴彦龙,刘晓峰,李仲明,邓 坚
(广东省粤电集团有限公司珠海发电厂,广东 珠海 519000)
锅炉燃烧器摆角控制问题分析
吴彦龙,刘晓峰,李仲明,邓 坚
(广东省粤电集团有限公司珠海发电厂,广东 珠海 519000)
针对某电厂锅炉燃烧器改造后摆角在锅炉实际运行中控制不合理易造成汽温、汽压异常的情况,从燃烧器摆角的基本控制、摆角的偏差信号、机组负荷的摆角补偿3方面分析了燃烧器摆角控制设置上存在的问题,并提出了锅炉燃烧器摆角控制策略优化改进建议。
燃烧器;摆角控制;信号控制
0 引言
在目前的燃煤火电厂机组中,锅炉燃烧器都设有摆角,其主要目的是调整锅炉再热器出口汽温,使其维持在规定温度下运行。但在实际运行中,由于燃烧器摆角控制不合理易造成汽温、汽压异常,因此已将燃烧器摆角调节作为锅炉燃烧运行的主要调节手段,通过调整燃烧器摆角改变锅炉炉膛火焰中心,直接影响锅炉主汽的汽温和汽压,同时也影响进入锅炉的煤量和送风量,改变锅炉的燃烧工况,对机组运行的稳定和效率起到关键性的作用。
2013年,某电厂对锅炉燃烧器进行了改造,同时也调整了燃烧器摆角的控制策略。从改造后投运至今,经过实际运行观察发现,由于对锅炉燃烧器摆角控制策略的修改并不完善,运行中常发生主汽参数波动较大、主汽超温超压的情况。
1 燃烧器改造前后的结构组成
该电厂使用的锅炉为日本三菱重工设计的辐射再热式、强制循环、平衡通风、四角切圆燃煤亚临界汽包锅炉。设计蒸汽流量(BMCR)为2 290 t/h,主/再热出口汽温为541/568 ℃;再热蒸汽温度调节以燃烧器摆角调节为主要手段,此外在再热器入口还设有事故喷水减温装置。锅炉燃烧器改造前,燃烧系统由6层(24只)煤粉燃烧器、3层辅助风(二次风)、3层轻油枪及4层OFA(燃烬风)组成。煤粉燃烧器为日本三菱重工设计的水平摆动式浓淡分离PM燃烧器,燃烧器摆角最大为±25°。
为了响应国家环保要求,降低烟气的NOX排放,2013年该电厂分期对2台锅炉燃烧器进行了改造。主要改造方案是将水平摆动式浓淡分离PM燃烧器改换成日本三菱重工设计的新型内置式浓淡分离低氮APM燃烧器,取消1层OFA,在OFA上部加装2层AA(还原风),以实现锅炉分级燃烧。燃烧器改造安装后,调整燃烧器各挡板风量,并修改燃烧器摆角的控制逻辑。锅炉经过各负荷段的各项性能调试,达到了降低NOX排放指标的预期效果,燃烧效果也得到了明显改善,缩小了以往再热出口汽温偏差严重的问题。
2 燃烧器改造后锅炉运行的问题
(1) 在制粉系统启停过程中,主汽参数波动较大。机组参与AGC(自动发电负荷控制)后,负荷经常波动,需要启停制粉系统以配合锅炉负荷燃烧调整。在制粉系统启停过程中,蒸汽参数波幅较大,特别是启停第5台制粉系统时,出现超温和超压比较严重的情况。当制粉系统启动时,主汽压力一直偏低,由于燃烧器摆角的自动调节速度过于缓慢,下降幅度过小,主/再热出口汽温容易超温;而当制粉系统停运时,由于燃烧器摆角上调幅度偏小,主汽压力容易过高,甚至超压,造成汽温偏低。
(2) 锅炉再热出口汽温波动时,摆角调节的作用不明显。再热出口汽温经常随锅炉负荷的变化而波动,容易偏离设定值,且波动幅度较大,波动周期长。但此时燃烧器摆角的调节速度比较缓慢,不能快速消除偏差。在调整锅炉状态平衡稳定的过程中,主汽压力也受到影响,给锅炉燃烧造成很大的扰动,影响了锅炉燃烧参数的平衡调节。
(3) 在锅炉加减负荷过程中,汽温和汽压变化过大。在锅炉加负荷的过程中,主汽压力下降较大,机组加负荷常受到压力低的限制。过热器和再热器受热面金属温度,特别是新加装的过热器和再热弯管的金属测点温度也因此经常超限(2号锅炉问题相对较严重)。当锅炉在高负荷区域减负荷时,主汽压力又容易上升过快、过高,在没有人为干预的情况下,有时会导致高旁动作,主汽温也大幅下降,严重威胁锅炉安全运行。
3 燃烧器摆角的逻辑控制策略
燃烧器摆角的运行调整是各影响因素的综合结果,根据摆角控制逻辑图可知,影响燃烧器摆角调整的因素主要有:角指令反馈、摆角偏差、初始摆角值(设置为0°)、锅炉负荷(BM)、机组负荷摆角补偿、FCB/RB信号、摆角自动/手动控制指令、再热器金属温度测点等。
当燃烧器摆角切换为手动方式时,摆角指令由运行人员直接控制,不受逻辑设置的影响。当摆角切换为自动方式后,将进入逻辑控制。
3.1 摆角的基本控制
运行中,BM值不同,再热出口汽温的设定值也有所不同,设置值如图1所示。当BM大于350 MW后,再热出口汽温可达到额定温度。逻辑上,控制人员在不同锅炉负荷下通过函数FX026设置摆角对应一定角度,BM控制函数FX026曲线如图2所示。
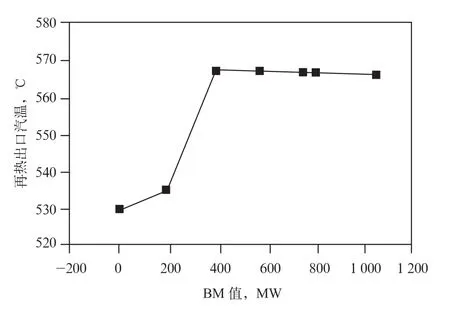
图1 各负荷段的再热出口汽温设置
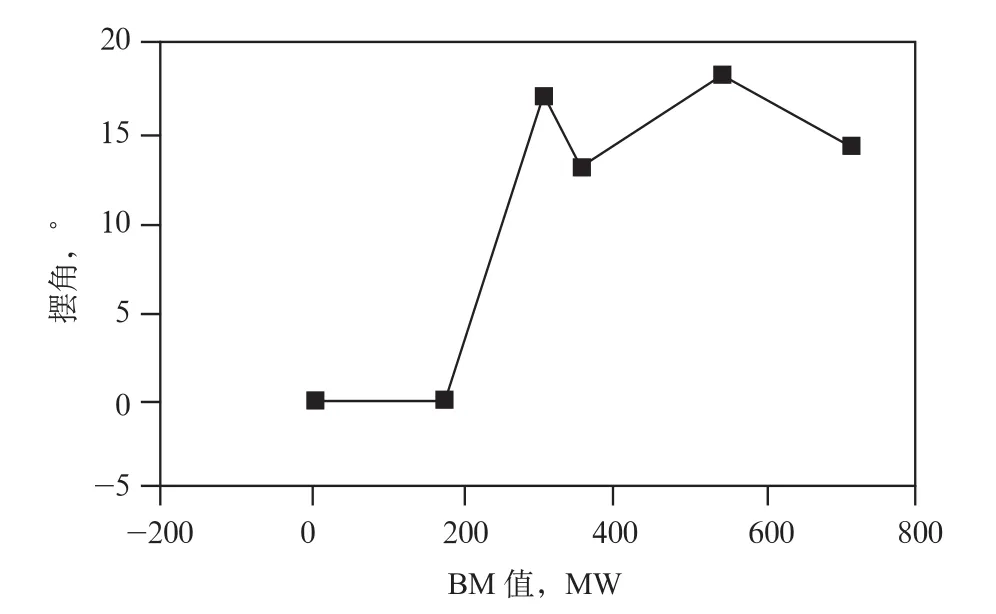
图2 BM控制函数FX026曲线
从图2可以看出:燃烧器摆角的调节主要受BM值的影响,当BM值大于175 MW时,摆角参与再热出口汽温调节开始变得明显,干预度相当大,形成摆角控制的基础。曲线上几个主要节点为:BM值从175 MW升至300 MW,摆角上升;BM值从300 MW升至350 MW,摆角下降;BM值从350 MW升至525 MW,摆角上升;BM值从525 MW升至700 MW,摆角下降。这些节点的确定和制粉系统的启停密切相关,因此可以认为:摆角的控制定值应该是根据锅炉的运行特性、相关操作手册以及对再热出口汽温变化趋势所定下来的经验曲线(包括以下其他函数控制曲线的制定)。机组正常时在AGC方式下运行,当启动第5台制粉系统时,BM值通常在450 MW;随着磨煤机的启动,大量的一、二次风投入,直接引起炉膛火焰中心的提高,且锅炉负荷加大,燃烧器摆角呈上升趋势,使锅炉火焰中心更高,导致炉膛吸热小。这就是制粉系统启动时,主汽压力降低、主/再热出口汽温容易超限的主要原因。而当制粉系统停运时,情况则恰好相反。
3.2 摆角的偏差信号控制
锅炉的负荷变化对再热出口汽温变化影响很大,导致汽温实际值与规定值经常发生偏差。该偏差被作为摆角调节的控制信号,称为摆角偏差信号(TILT DEV SIGNAL),控制方式表现为以下2种。3.2.1 引入温度偏差的PID控制
PID调节由比例、积分、微分3部分组成。其中,比例调节作用是当系统出现偏差时,能立即同偏差量成比例地产生调节以减少偏差,但调节终了会产生静态偏差。积分调节作用是使系统消除指令与反馈偏差,直至无差;积分作用的强弱取决于积分时间常数Ti:Ti越小,积分作用就越强。查阅2号锅炉PI调节器的参数(K=0,Ti=2 300 ms)可知,比例调节没有参与温度控制,积分系数较大,只有摆角偏差信号有瞬间性波动时,积分才有输出参与摆角调节。微分作用反映系统偏差信号的变化率,能预见偏差变化的趋势,逻辑上设置时间值Td=1 s,即当输入的温控偏差值变化率为1 ℃/s,微分调节输出就改变摆角0.2°(温控偏差×0.2),当变化率变小时,输出就小。由此可知,当有摆角偏差信号值时,PID调节主要是通过微分支路控制摆角指令,但在设置上控制力度明显较弱,使摆角摆动较缓。摆角调整缓慢虽然扰动小,有利稳定,但使调整时间显得过长,在锅炉工况有变动时,反而造成锅炉参数波动大,不利于运行的稳定。
3.2.2 设置BM的摆角补偿
为了快速减少再热温控偏差,提高摆角反应速度,对摆角偏差信号设置BM的摆角补偿,采用BM不变和BM变动2种控制方式,控制曲线如图3,4所示。BM不变的摆角调节值为补偿系数函数FX024与摆角偏差信号的积函数X022。其控制逻辑是:摆角偏差信号越大,函数X022输出也越大,摆角补偿就越大;摆角偏差信号输出为正值,摆角上摆;摆角偏差信号输出为负值,摆角下摆。BM变动的补偿系数函数FX027与BM不变的补偿系数函数FX024的切换是靠LOAD CHANGE IN PROG置“1”来自动完成的,控制方法同机组负荷稳定时一样,只是输出值有负荷段的区别:BM值从175 MW升至350 MW,补偿系数逐渐增强;大于350 MW后补偿系数保持不变;当机组负荷停止变动时,LOAD CHANGE IN PROG置“0”,延时120 s后,自动切换到BM不变的补偿系数函数FX024控制输出。

图3 BM不变的FX024函数曲线

图4 BM变动的FX027函数曲线
从BM值的摆角控制曲线分析,补偿系数函数输出最大值为0.15。如果摆角偏差信号为10 ℃,可算出函数X022的积值为1.5(即摆角上摆1.5°)。摆角上摆的幅度与产生的温控差值相比偏小,制约了主/再热出口汽温参数的变化速度,以致影响到锅炉燃烧的响应速度。
3.3 机组负荷的摆角补偿
当机组负荷变化时,再热出口汽温受锅炉燃烧影响,波动也较大。为了稳定再热出口汽温,策略上设置机组负荷摆角补偿BIR TIL。
机组负荷摆角补偿BIR TIL值受到机组负荷变化率LD、各负荷段的补偿值和负荷补偿限制值的影响。当机组负荷增加时,LD(H)输出正值,LD(L)输出为0;当机组负荷降低时,LD(L)输出负值,LD(H)输出为0。机组加减负荷的各负荷段摆角补偿值设置不同,函数曲线如图5,6所示。因为函数FX141和FX143的输出均没有正值,使机组负荷对摆角的补偿表现为:机组加负荷时摆角下摆,机组减负荷时摆角上摆。
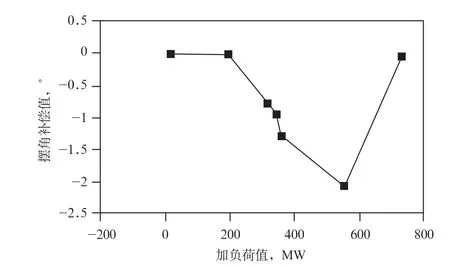
图5 加负荷补偿函数FX141曲线

图6 减负荷补偿函数FX143曲线
通过各函数曲线输出值的计算比较,可以看出,函数模块FX145(FX147)(见图7)作为摆角补偿BIR TIL控制系统的主控回路,对BIR TIL的输出值起到很大的控制作用。
从图5可以看出,在摆角参与负荷调节后,负荷变动摆角补偿值随负荷的增加呈现干预加剧趋势,在负荷值为546 MW时,摆角补偿值最大,往后影响逐渐减弱。通过比较,机组负荷为546 MW时,函数FX145的限制输出约为1.5°/min,可知在函数FX145的作用下,严重影响了燃烧器摆角下摆的幅度。因此,当机组大幅度加负荷时,就出现燃烧器摆角下摆角度不够大,导致主汽压力下降严重,主/再热出口汽温容易超限的情况。同时,因为机组运行方式为协调控制运行模式,机组负荷也因为主汽压力受限,上升速度受到了限制。这情况与负荷补偿限制函数FX145曲线设置不合理有很大的关系。

图7 负荷补偿限制函数FX145(FX147)曲线
同时,由图6控制曲线可看出:当机组减负荷时,机组负荷小于525 MW时,函数FX143才开始输出负值,摆角补偿BIR TIL输出正值,开始干预摆角上摆。但机组负荷在700~525 MW时,负荷摆角补偿BIR TIL输出值为0,这时燃烧器摆角的控制仅受到锅炉负荷BM值和摆角偏差信号的影响,上摆幅度小而且滞后。由于受汽包炉蓄热的影响,汽机调门关小后,主汽压力容易飙高,甚至造成高旁动作。这种现象和机组负荷降低时补偿函数FX143曲线设置不合理,导致燃烧器摆角无法及时上摆有很大的关系。
4 优化燃烧器摆角控制策略的建议
综上所述,燃烧器摆角的控制策略是以锅炉负荷变化作为调节基础,以再热出口汽温控制偏差作为调节对象,利用机组负荷变化加以辅助补偿而构成的。摆角最终的指令输出值为以上控制因素之和。各控制函数的制定遵循锅炉加、减负荷时主汽压力的变化趋势,以及制粉系统启停时对锅炉燃烧运行的影响。但在锅炉燃烧器摆角调节过程中,存在着控制参数和节点设置与实际运行状况不吻合的问题,导致锅炉各参数波动较大,经常偏离正常运行工况。因此,优化摆角控制函数设定十分必要。为使控制策略更合理有效,提出以下建议。
4.1 论证并修改函数曲线
(1) 将锅炉负荷控制函数FX026曲线中的节点由525 MW修改为455 MW,使曲线和第5台制粉系统启动控制相符。
(2) 将BM不变的补偿系数函数FX024的输出值调整到0.3以上,以加大负荷平稳时对再热出口汽温偏差的灵敏度。
(3) 将BM变动的补偿系数函数FX027输出值增大到0.3~0.5,提高摆角调节幅度,参与主汽参数变化的深度调整。
(4) 修改机组负荷补偿限制函数FX145(FX147)曲线,将该曲线上375 MW节点对应的控制值提高到1°/min。
(5) 修改机组减负荷补偿函数FX143曲线,将该曲线上525 MW节点对应的控制值下调到-0.5°/min,并保证在700~525 MW减负荷时,摆角补偿BIR TIL输出正值,使摆角先于再热出口汽温下降前上摆,从而避免了主汽压上升超限的问题。
4.2 加入主汽压力偏差信号控制
主汽压力偏差信号反映了锅炉和汽机的平衡情况,间接地影响了摆角的调节,考虑将压力偏差作为一个反馈信号加入摆角的控制,则可预先反映再热出口汽温的变化趋势,有利于改善并加强锅炉燃烧的调节力度和响应速度。
5 结束语
1,2号锅炉燃烧器改造后,由于在调试中没有充分考虑机组列入调峰对锅炉负荷变动运行的影响,使燃烧器摆角对再热出口汽温的波动和机组负荷变动时的干预度较弱,调整性差,造成锅炉各运行参数不理想,机组运行受到较大的影响。燃烧器摆角运行调试,也是对锅炉各改造项目的综合性能的校验,需要细致、深入地分析各运行数据,做好长期跟踪和改进,以取得更好的效果。
2014-11-18;修改日期:2015-01-12。
吴彦龙(1974-),男,工程师,主要从事机组的启停与设备运行控制管理工作,email:wuyanlong0233@sina.com。
刘晓峰(1975-),男,工程师,主要从事发电机组热动控制与设备改造研究工作。
李仲明(1974-),男,工程师,主要从事机组调控运行与人事管理工作。
邓 坚(1973-),男,工程师,主要从事机组锅炉运行方式控制运行措施制定与设备管理工作。
猜你喜欢
黑龙江电力(2022年6期)2022-02-01
科学与财富(2021年13期)2021-07-04
制造技术与机床(2019年7期)2019-07-22
商品与质量(2018年46期)2018-12-08
中学教学参考·理科版(2018年3期)2018-05-23
商品与质量(2018年42期)2018-04-22
东北电力技术(2017年4期)2017-05-17
电力与能源(2017年6期)2017-05-14
亚太教育(2016年35期)2016-12-21
自动化博览(2016年7期)2016-09-07
