图像频谱分析在像移残差检测中的应用
2015-12-30 07:17李英杰李开端
兵器装备工程学报 2015年7期
李英杰,李开端
(海军航空工程学院青岛校区,山东 青岛 266041)
图像频谱分析在像移残差检测中的应用
李英杰,李开端
(海军航空工程学院青岛校区,山东 青岛266041)
摘要:像移残差是影响航空相机性能的重要因素,分析了TDICCD相机的像移及像移补偿模型,并对含有像移残差图像的频谱特性进行了研究,提出了基于图像频谱分析的像移残差检测方法。利用实验仿真数据分析了残差的检测误差,当残差大于6个像元时,误差不大于0.5像元。该检测方法能够满足航空相机像移补偿系统性能定检的要求,并且具有不依赖相机系统技术条件的优点。
关键词:航空相机;像移残差;频谱分析
在航空相机的工作过程中,由于飞机飞行运动、振动、气流扰动等原因,造成目标像点移动,这类像移的控制是相机提高分辨率的关键技术。为了提高成像质量,像移补偿措施多种多样,如旋转双光楔补偿、移动焦面补偿、摆动反光镜补偿、TDICCD电子补偿、稳定平台等[1-3]。像移补偿性能是由补偿后像移残差大小决定的,通常根据补偿系统控制构造,设计专用仪器检测补偿系统各组件信号实现残差的检测。文献[4]中设计了航空相机像移补偿板的检测仪器,文献[5]中提出动态靶标方案对光电稳定平台的静动态参数进行检测。本研究通过理论分析像移量、像移残差,运用图像频谱特性分析的方法实现对像移残差的检测。
1航空相机像移残差
1.1 像移速度
航空相机在工作过程中,由于受飞机平台飞行运动、姿态运动的影响产生像点移动,其中沿飞行纵向的像移是由飞行运动v、俯仰角速度θ'、偏流角速度ψ'产生,横向的像移由飞机横滚角速度φ'产生。在工作状态下,飞机保持匀速平直飞行,姿态角变化不大于±5°,对于摆扫成像的TDICCD相机,纵向像移速度vx、横向像移速度vy可近似表示为[6]
(1)
(2)
式中:f为相机焦距;v为飞行速度;H为飞行高度;α为相机摆扫角度。
1.2 行间纵向像移量变化
航空相机摆扫成像过程中,初始扫描角为α0,而每帧图像对应扫描角范围Δα为
(3)
式中:b为TDICCD像元尺寸;n为图像每帧的行数;f为焦距。当相机每帧图像3 072行时Δα约为5.09°。将每帧图像行间最大纵向像移量差值称为行间纵向像移差ΔSPx,根据式(1),设曝光时间为t,则可获得行间纵向像移量公式
(4)
根据相机参数和工作条件:相机焦距f为450 mm、曝光时间t设为0.01 s、像元尺寸b为13 μm,得到初始扫描角α0分别为0°、20°时的行间纵向像移差值曲线,如图1所示分别为随偏流角速度、俯仰角速度、速高比的变化曲线图。根据图1中数据分析,在初始扫描角、姿态角速度较小时,行间纵向像移量差值小于一个像元尺寸,因此在一定范围内可以认为一帧图像中像移量相同。
图1 行间纵向像移量差值曲线
1.3 像移补偿及残差
航空相机成像系统由TDICCD器件、调焦反射镜、相机镜头、扫描反射镜等组成,TDICCD器件列向与相机纵轴平行。相机工作时,光学系统绕纵轴摆扫成像,并采用反射镜摆动控制、TDICCD行转移控制分别实现对纵向、横向像移的补偿。
在相机曝光时,精确控制扫描反射镜的摆动速度补偿纵向像移。由于反射镜反射光线转角与其转动角度是2倍的关系,因此当反射镜存在摆动角速度θm'时,所产生的像移补偿速度vm=fθm'/2。由式(1)可得反射镜补偿角速度应为
(5)
飞机横滚角速度引起的横向像点移动可以通过TDICCD行转移频率控制实现补偿,随着横滚角速度的变化,由式(2)可得到行转移频率增加的补偿转移频率fm为
(6)
式中:f相机焦距;b为像元尺寸。

2运动模糊图像频谱特征分析
像移补偿引起的图像降质问题是一类图像运动模糊问题。假设引起图像降质原因为像点直线运动,则图像退化模型为[7-8]

(7)
式中:f(x,y)、g(x,y)、h(x,y)分别为原始图像、退化图像以及运动点扩散函数;*为卷积运算。像移运动点扩散函数可以表示为

(8)
式中:β为运动角度,表示模糊运动方向与水平轴x正向的夹角;L表示运动模糊尺度,是在运动方向上移动距离。对式(7)傅里叶变换得到运动模糊图像的频谱为
(9)
式中:u、v为频域空间分辨率;N×N为离散图像尺寸。当满足公式
L(ucosβ+vsinβ)/N=k
(10)
其中:k为整数时;sinc函数存在周期性的零点。因此,G(u,v)的幅度谱上表现出一系列的平行暗条带,如图2所示。暗条带的方向与模糊运动方向相互垂直,暗条带等间距分布,假设暗条带间距为D,暗条带与中央亮条带中心的距离为ρ=ucosβ+vsinβ,则ρ为D的整数倍,即ρ=kD,因此运动模糊尺度为
L=N/D
(11)

图2 运动图像频谱
3像移补偿残差检测
由于实际飞机平台在曝光成像期间的速度、高度、姿态角以及姿态角速度变化甚微,因此补偿残差造成的图像降质可以看作匀速直线运动模糊,利用运动模糊图像频谱特征估计模糊参数就可检测出像移补偿的像移方向以及补偿残差值。
3.1 像移方向检测
相机像移方向检测就是对图像运动模糊方向的估计,首先利用对图像频谱图Radon变换曲线估计模糊方向。设二维图像f(x,y),f(x,y) 的Radon变换在极坐标ρ-ψ中变换表达式定义为[9-10]
(12)

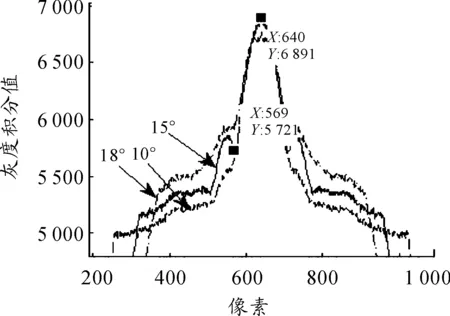
图3 航空图像及其Radon变换曲线
3.2 像移残差检测
相机像移补偿残差值反映在图像中为运动模糊尺度,通过Radon变换曲线波瓣存在极值的特点确定模糊方向后,利用运动模糊方向上的Radon变换曲线求取图像频谱图的暗条带间距D,由式(11)求得模糊尺度,也就是相机的像移补偿残差值。图3所示航空图像尺寸为900像元×900像元,假设模糊方向为15°,在该方向的Radon曲线上测得暗条带间距D为71像素,这样可求得像移补偿残差值为12.6个像元。
4检测误差仿真分析
由于航空相机工作时飞机保持匀速平直飞行,因此正常的姿态角速度变化控制在不大于±5°/s的范围内,当相机像元尺寸为13 μm、焦距为450 mm、速高比不大于0.134 s-1、曝光时间为0.01 s时,纵向像移残差ΔSx<0.996 mm、横向像移残差ΔSy<0.392 5 mm,相机像移残差一般不大于77个像元。在像移残差范围内,对航空图像进行预设运动模糊验证分析。像移方向在0~90°范围内沿纵向每隔10°取值,像移残差大小分别取3、5、10、15、20、25、30像元,共计预设70幅像移模糊图像。采用图像频谱分析法检测各图像像移方向估值和残差估值,得到像移方向误差曲线、残差估值误差曲线分别如图4(a)、图4(b)所示。通过分析像移方向误差曲线,可以看出像移方向的估值精度与像移残差的大小有关,小残差时误差较大,当残差尺度大于6像元时,方向估值误差小于1°;像移残差估值误差曲线分析可知,残差尺度小于6像元时,估值误差较大(大于1个像元),像移残差预设大于6像元时,估值误差为0.5像元左右。利用航空图像像移残差的检测可以实现对航空相机像移补偿系统工作性能的检查,方向和尺度的估值精度能够满足对性能判断的检测要求。
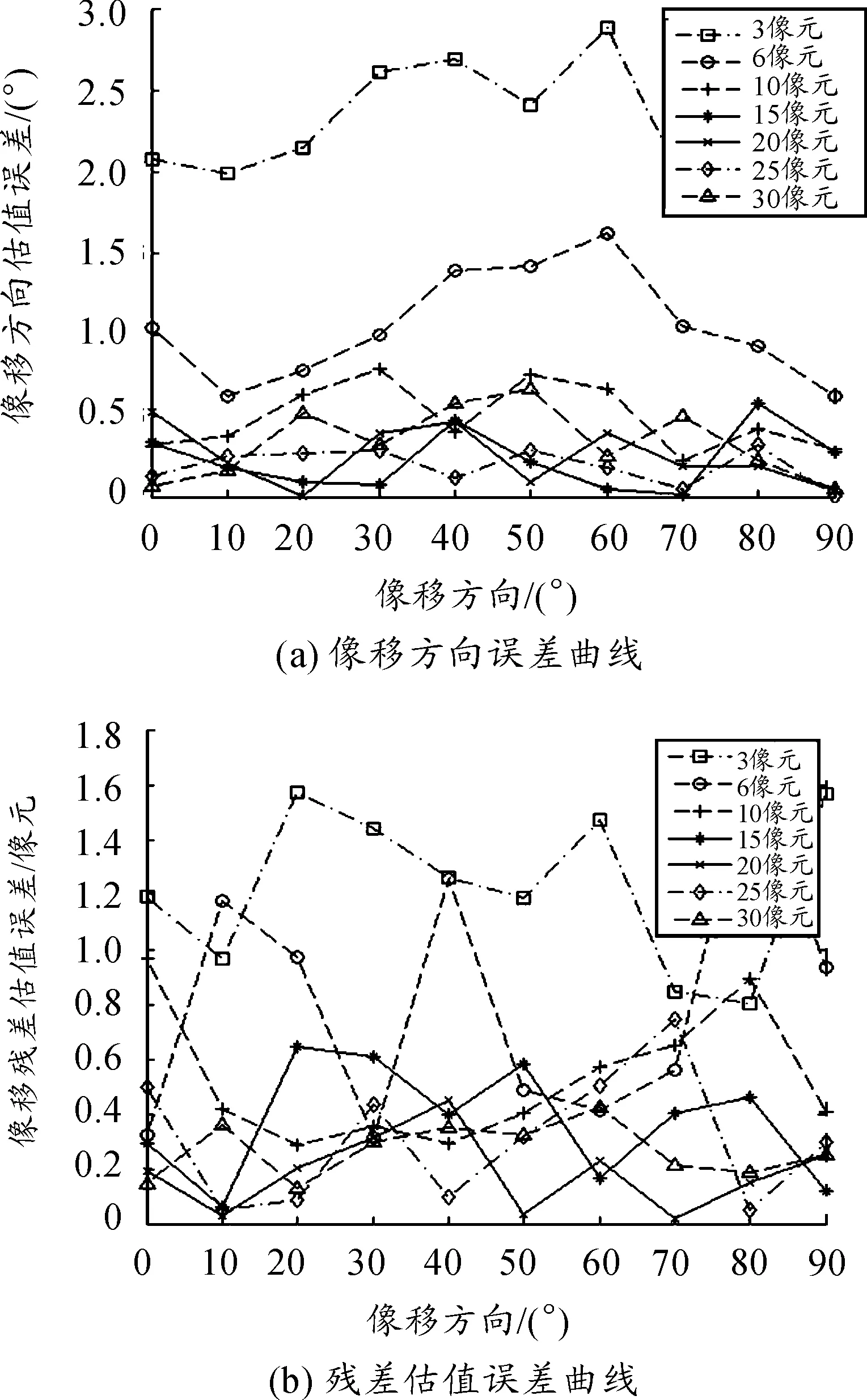
图4 航空图像像移方向估值误差及
5结论
航空相机像移的控制是提高成像质量的关键环节,像移补偿后的像移残差检测在相机设计、使用等阶段尤为重要。残差检测通常从硬件控制入手,着眼对系统各组件信号的测量。本研究通过建立像移残差数学模型,分析一帧图像像移残差基本一致性,提出了基于图像频谱特性分析的像移补偿残差检测方法。仿真结果显示检测精度能够满足航空相机使用阶段对像移补偿系统性能定检的要求,它避免了像移残差检测对相机系统软、硬件设计技术的依赖,具有较好的推广应用前景。
参考文献:
[1]许永森,丁亚林.推扫式航空遥感器像移补偿精度的分析[J].光学精密工程,2009,17(2):453-457.
[2]Lareau A G.Electro-optical imaging array with motion compensation[J].SPIE,1993,2023:65-79.
[3]Doyle K B,Cerrati V J,Forman S E,et al.Optimal Structural design of the airborne infrared imager[J].Proceedings of the SPIE,1995,2542:11-32.
[4]王智儒,杨成禹.航空相机补偿板的检测[J].长春理工大学学报:自然科学版,2010,33(4):20-22.
[5]李岷,马军.机载光电稳定平台检测技术的研究[J].光学精密工程,2006,14(5):847-852.
[6]吴宏圣.TDICCD全景航空相机像移补偿研究[D].长春:中科院长春光学精密机械与物理研究所,2003:31-61.
[7]Sakano M,Suetake N,Uchino E.A PSF estimation based on Hough transform concerning gradient vector for noisy and motion blurred images[J].IEICE Transactions on Information and Systems,2007,90(1):182-190.
[8]廖永忠,蔡自兴,何湘华.基于点扩散函数参数辨识的运动模糊图像的盲恢复研究[J].光学技术,2014,40(3):235-239.
[9]Moghaddam M E,Jamzad M.Finding point spread function of motion blur using radon transformation and modeling the motion length[C]//Proceedings of the Fourth IEEE International Symposium on Signal Processing and Information Technology.Rome:IEEE 2004:314-317.
[10]Moghaddam M E,Jamzad M.Finding point spread function of motion blur using Radon transform and modeling the motion length[C]//Proceedings of the 4thIEEE international symposium on signal processing and information technology.Rome,Italy:IEEE,2004:314-317.
(责任编辑杨继森)
收稿日期:2012-02-23
作者简介:李英杰(1972—),男,硕士,副教授,主要从事航空光电成像技术、航空装备保障研究。
doi:10.11809/scbgxb2015.07.022
中图分类号:TP732
文献标识码:A
文章编号:1006-0707(2015)07-0086-04
本文引用格式:李英杰,李开端.图像频谱分析在像移残差检测中的应用[J].四川兵工学报,2015(7):86-89.
Citation format:LI Ying-jie, LI Kai-duan.Application of Image Spectral Analysis for Detection of Image Motion Residue[J].Journal of Sichuan Ordnance,2015(7):86-89.
Application of Image Spectral Analysis for Detection of
Image Motion Residue
LI Ying-jie, LI Kai-duan
(Qingdao Campus, Naval Aeronautical Engineering Institute, Qingdao 266041, China)
Abstract:Image motion residue is an important factor which affected the performance of aerial camera. The models of the image motion and image motion compensation were analyzed. The spectral character of aerial image including image motion residue was studied. A detection method for the image motion residue was presented by using image frequency spectrum. The measure error was analyzed by the simulation data. The test results showed that the error is not larger than 0.5 pixels when the residue is larger than 6 pixels. This method could meet the demand for the periodic inspection of image motion compensation mechanism of aerial camera and it has an advantage because it did not rely on the technique condition of aerial camera.
Key words:aerial camera; residual error of image motion; spectral analysis
_______________________
【信息科学与控制工程】