机构原理智能可视化平台的研制
2015-12-29 06:56陈瑞林
长春师范大学学报 2015年4期
陈瑞林,丁 颂
(长春师范大学工程学院,吉林长春130032)
1 总体设计方案
机构原理智能可视化平台由智能载重车、三角支架和旋转六面体平台构成(图1)。在图1中,位置1为航母发动机,位置2为空间四杆机构,位置3为内燃机,位置4为鄂式破碎机,位置5为变速器,位置6为链带传动,位置7为智能载重车。在程序的控制下,智能载重车通过传感器反馈作用,能够实现自由运动、智能壁障;三角形支架采用三角形结构,结构稳固、自重轻、承载能力大,可以有效地联系智能载重车和旋转六面体平台,为旋转六面体平台提供稳固的支撑作用和足够的运转空间;旋转六面体平台,由六个面构成,形成立体式平台,该平台展示内容可以任意扩展,本文以机械设计基础课程为例,在六个面上分别展示了变速器机构、平面连杆机构、多级变速器、凸轮机构、带和链传动机构以及空间四杆机构的传动原理及运动规律。基于慧鱼模型搭建机构原理智能可视化平台,如图2所示。
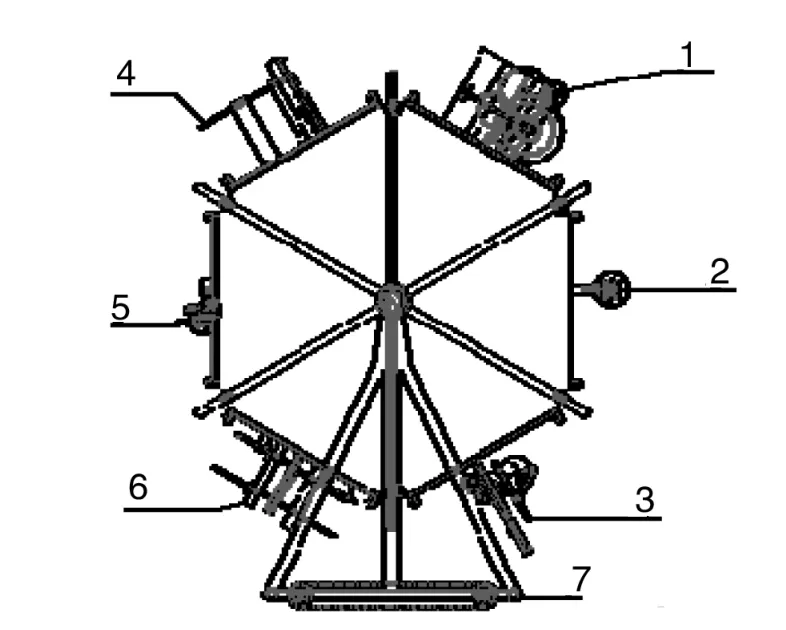
图1 机构原理智能可视化平台

图2 机构原理智能可视化平台
1.1 智能载重车的设计
车体用四个长度相同的杆件搭建,由四个大小相同的电机带动,运用圆柱蜗杆蜗轮传动,其传动比大,体积小,承载能力大。同时当蜗杆的螺旋线升角小于啮合面当量摩擦角时,蜗杆蜗轮传动具有自锁性,不可倒转,此时蜗杆蜗轮机构只能用蜗杆驱动,并能阻止蜗轮反驱动,能够在没有任何附加制动装置的情况下使用。同时选择履带传输,使车体底面与地面接触面积增大,压强减小,增大了运动的平稳性。
1.2 支架设计
在支架设计中要考虑到两方面:稳定性和足够的空间。三角形具有稳定性,首先确定支架的形状为三角形,支架由加强筋加固。关于支架的尺寸设计,通过测量得到旋转六面体平台单个面板长度L=250m,宽度B=180mm,确定支架高度h=460mm,长度l=380mm,宽度b=410mm,由tanα=460/205≈1.699计算可得角α=30°。为使支架稳定,全部采用三角形结构,在支架最外轮廓用强度较高的空心粗杆搭建,以减轻整体的重量,内部用细实杆,使整个支架牢固且稳定。
1.3 旋转六面体平台六个面的设计
基于本专业的课程内容,在六个不同的面板上分别设计了不同的传动机构(图3),分别为内燃机、航母发动机、破碎机、变速器、链带传动和平面连杆机构等。程序控制式旋转六面体,结构紧凑,易于操作,由此全面系统地展示了机械设计基础课程中的机械传动系统。
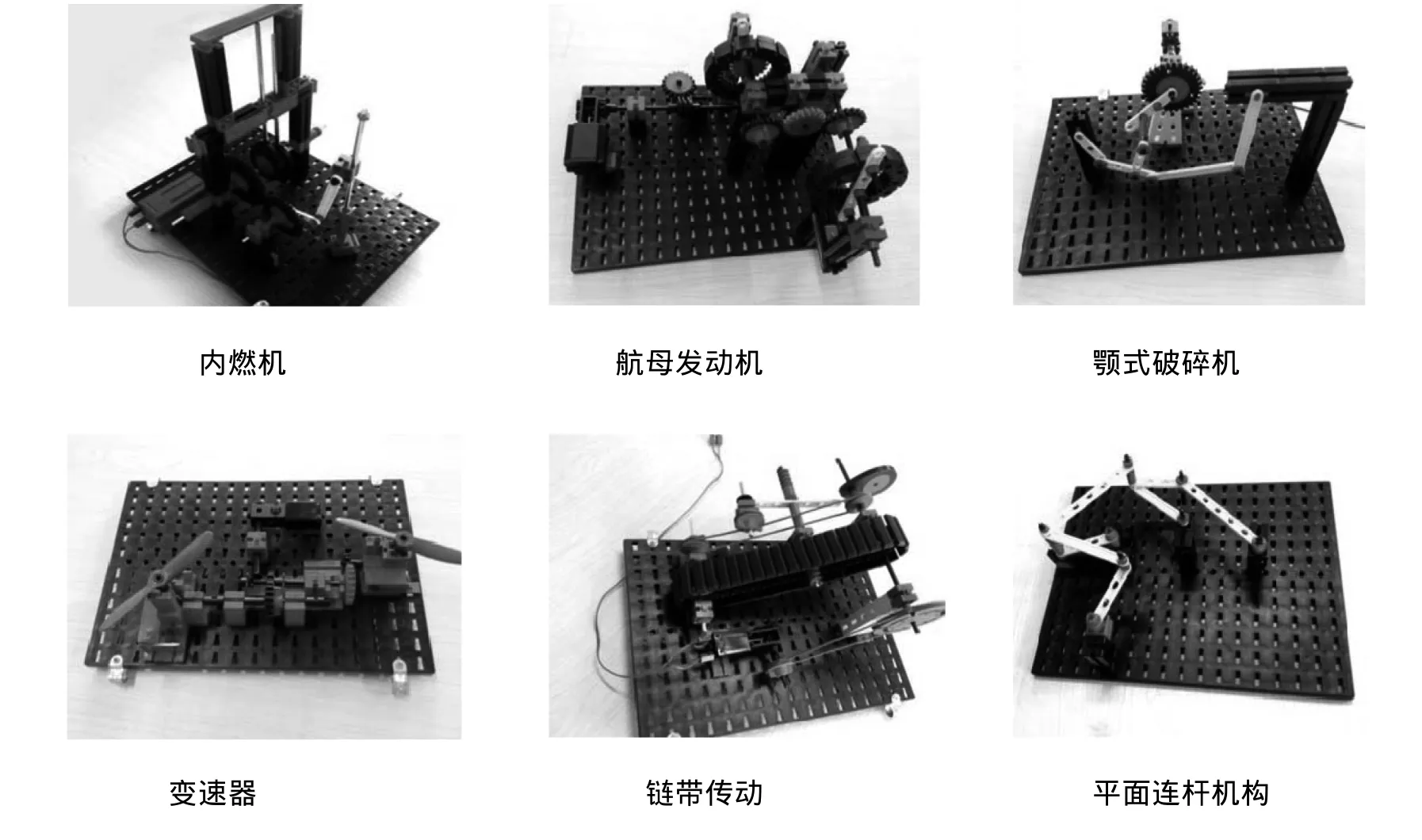
图3 旋转六面体六个面板
2 运动原理分析
本平台由一个控制面板、三个电源组成,通过计算机将编辑程序导入控制面板中,利用控制面板中的程序对整个机构实现控制,使“机构原理智能可视化平台”自动运转。智能载重车上的两个电源分别连接两侧的四个直流电动机使其左右履带运转,另一个电源为旋转六面体平台的六个面板上不同传动机构提供运转能源。
为实现自动避障的功能,在车体前端和两侧装有超声波检测装置,用于检测来自前方不同方向的障碍。通过程序设计,当检测到前方15~35cm范围内有障碍时,根据两侧传感器传回数据,车体向无障碍一侧转弯。在相同情况下,向左转,车体实现转弯,当检测到前方小于10cm范围内有障碍时,车体停止前进,向后运动,退后15cm,检测转弯,实现自我保护,在保证运动平稳性的同时实现无人控制自动运动,由此也可以通过遥控器实现远距离控制。
在支架上安装两个超声波探测器,一个超声波探测器的作用是对旋转六面体平台进行准确定位,使旋转六面体平台能够精确停止,并通过自动开关对处于最上端一个面的传动机构进行展示;另一个超声波探测器的作用是:小车在行走过程中,学生伸手在传感器正前方15~35cm处时,小车便会在控制面板的操作下停止,然后旋转六面体平台开始运转。旋转六面体平台上的六个支架上分别有相同的接触开关,可以使旋转六面体平台旋转,当支架的接触开关与小车支发生接触时,回路闭合,六面体停止旋转,面板上的机构则开始运动展示。
3 程序设计
主程序如图4所示,避障子程序如图5所示,旋转六面体子程序如图6所示。程序中符号含义如下:MI、M3为车体左侧电机;M2、M4为车体右侧电机;I1为支架右侧超声波感应器;I3、I4为车体前端左右超声波感应器;I2为支架正左侧超声波感应器。
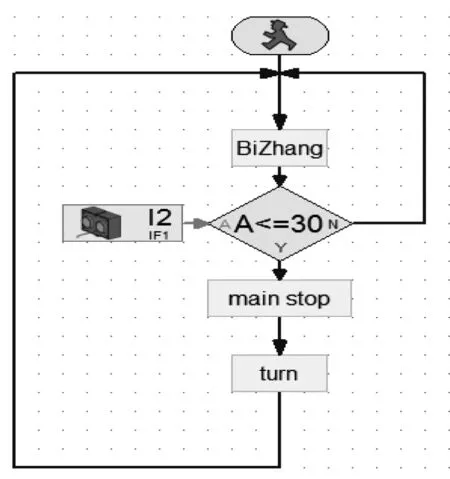
图4 主程序示意图
程序含义如下:
主程序开始进入避障程序,当I2感应强度不超过30时,执行转弯避障的子程序,当I3感应强度超过11时,M1、M3继续正转,M2、M4减速反转,实现避障左转的过程,同理I4可控制右转。程序循环可完成转弯避障的过程。
当I2感应强度超过30时,主程序停止运行,进入使旋转六面体转动的子程序,执行子程序,M1、M2、M3、M4四个电机停止转动,车体停止行进,同时I3、I4停止,车体避障停止,触动开关开启,旋转六面体转动,I1感应器开始运行,当感应强度超过7时,旋转六面体转动,感应强度低于7时,旋转六面体停止,同时触动开关开启,处于旋转六面体最上端的面板开始转动并进行展示。
六个面板展示结束后,再次进入转弯避障的子程序,程序循环执行,实现智能避障行走展示,也可通过遥控器控制机构原理智能可视化平台的整体运动、旋转六面体平台的旋转以及单个面板上机械结构的运动。
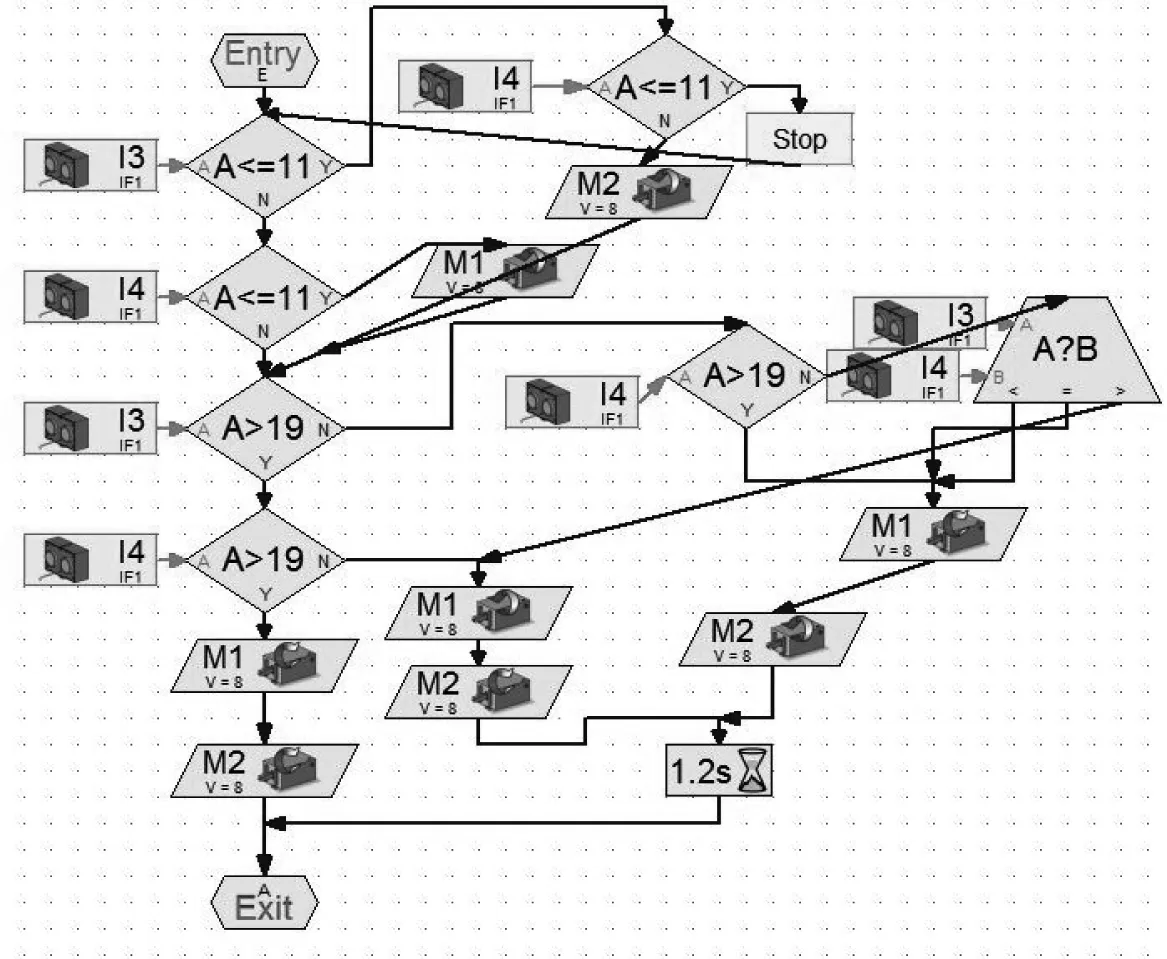
图5 避障子程序

图6 旋转六面体子程序
4 结语
机构原理智能可视化平台能很好地解决目前高校大班上课中存在的占座问题。另外,该设备开辟了一条教具途径,对旋转六面体平台可以任意扩展,使之成为理工科类教学人员的有利助手,相信在未来该设备将得到市场的认可。
[1]孙桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006.
[2]安琦,顾大强.机械设计[M].北京:科学出版社,2008.
[3]朱健民,吴翊,李建平,等.从教具谈大学数学教学方法改革[J].中国大学教育,2010(3):55-57.
[4]关晓佳.自制教具让物理教学充满活力[J].实验创新与教具制作,2014(4):45-47.
[5]张启森.浅谈职业学校汽车专业教具的发展[J].汽车维修与保养,2013(9):100-101.
[6]李俊.浅谈如何利用自制教具激发学生学习兴趣[J].价值工程,2013(34):286-287.
[7]翁海珊,王晶.机械原理与机械设计课外实践选题汇编——第一届全国大学生机械创新设计大赛决赛作品集[M].北京:高等教育出版社,2006.
[8]王晶.机械原理与机械设计课外实践选题汇编——第二届全国大学生机械创新设计大赛决赛作品集(附光盘)[M].北京:高等教育出版社,2007.
[9]王晶.第三届全国大学生机械创新设计大赛决赛作品选集(附光盘)[M].北京:高等教育出版社,2010.
猜你喜欢
商业评论(2021年10期)2021-10-20
数码设计(2018年1期)2018-05-23
中国水运(2017年6期)2017-06-13
电子制作(2017年24期)2017-02-02
电力系统及其自动化学报(2016年5期)2016-12-01
专用汽车(2016年12期)2016-02-11
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
中国新技术新产品(2014年3期)2014-03-24
铁道机车车辆(2012年4期)2012-11-27