
基于机载LiDAR点云数据精细DEM生产中数据精处理的研究
2015-12-28 07:05:23顾春墚
江西测绘 2015年3期
顾春墚
(浙江省第二测绘院 浙江杭州 310012)
基于机载LiDAR点云数据精细DEM生产中数据精处理的研究
顾春墚
(浙江省第二测绘院 浙江杭州 310012)
机载激光雷达数据的处理是自动滤波和DEM成果生成之间一个最关键的步骤,精处理的效率和处理精度直接决定了整个DEM制作过程的效率和成果的精度。以Terrasolid机载激光雷达数据处理系统为基础,介绍在Microstation v8平台下进行快速LiDAR点云数据精处理的方法。
LiDAR;数据精处理;DEM
1 引言
机载LiDAR点云数据精处理即点云数据的手工精处理,该过程是在对点云条带数据进行拼接精度检查、绝对精度检查、工程分块、分航线切割及初步自动滤波后,针对自动滤波不合理和不到位的地方进行的手工精处理。在整个点云数据处理过程中,手工精处理的工作量约占三分之二。如何快速高效地手工精处理直接决定了整个LiDAR点云数据处理的工作效率。同时处理是否到位,裸地表点是否完整保留,非地表点是否被剔除,直接影响最终DEM成果的精度。
本文采用浙江省舟山地区 1:10000比例尺LiDAR点云数据,研究在基于Microstation v8平台的Terrasolid软件下进行点云精处理的方法。

表1 航飞参数
2 点云数据精处理要求
依据国标和本次数据处理的设计要求,处理精度要求如下:
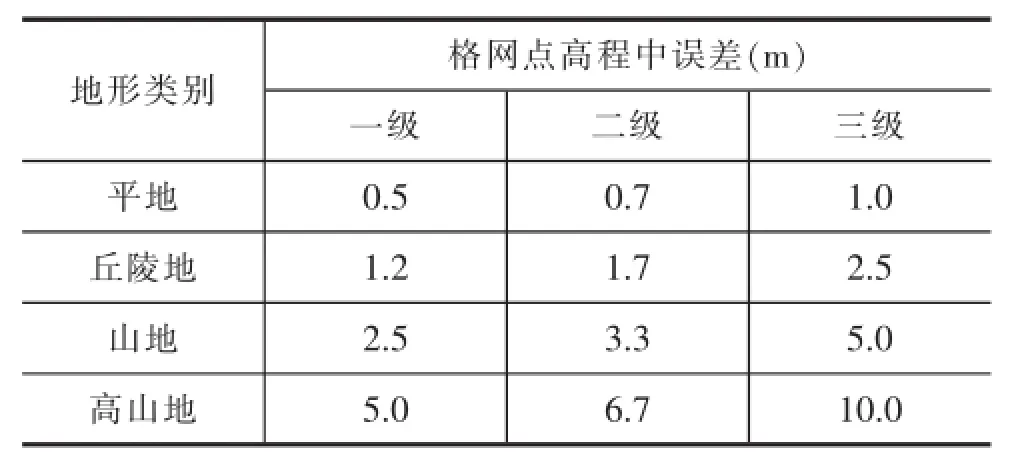
表2 DEM精度要求
3 点云数据精处理方法
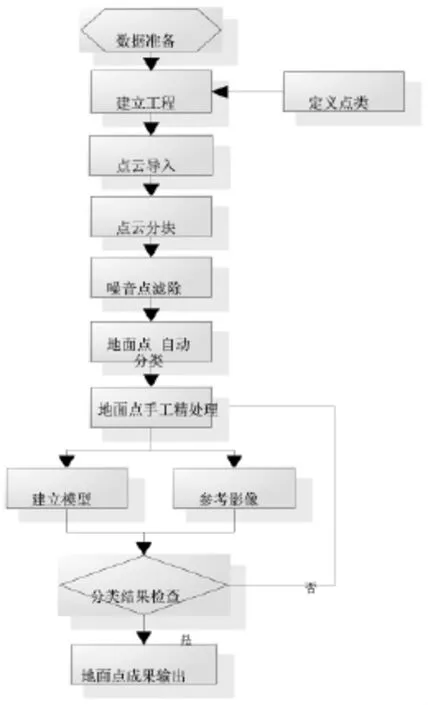
图1 点云数据处理流程图
点云数据处z理过程中,精处理是利用TerraScan软件中的各种手工分类工具,修改点云自动分类错误。
(1)用分类的结果制作点云高程晕渲图。
(2)检查晕渲图是否存在突变区域。若整个图形过渡平滑,表示分类较好。若有突变,则可能存在非地面点,需将晕渲图与数据叠加,找到突变处,检查是否存在分类错误(若有对应影像可参考影像)。
(3)将地面点、非地面点与晕渲图套合,在分类出错区域截取断面,仔细查看周边的点,并结合影像分析分类错误的原因,并进行修改。
(4)重复步骤(1)-(3),直到符合下列要求:
(1)平地一般较平坦,没有明显突出的点出现。田块中块状明显高出模型(高差≥40cm)的植被点需分类到非地面点类,不对点云做置平和修改高程值的处理。
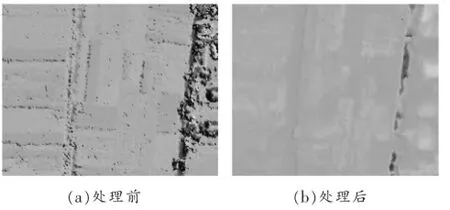
图2 田块中点云处理效果
(2)山地坡度过渡平滑自然,没有明显突变的点出现。
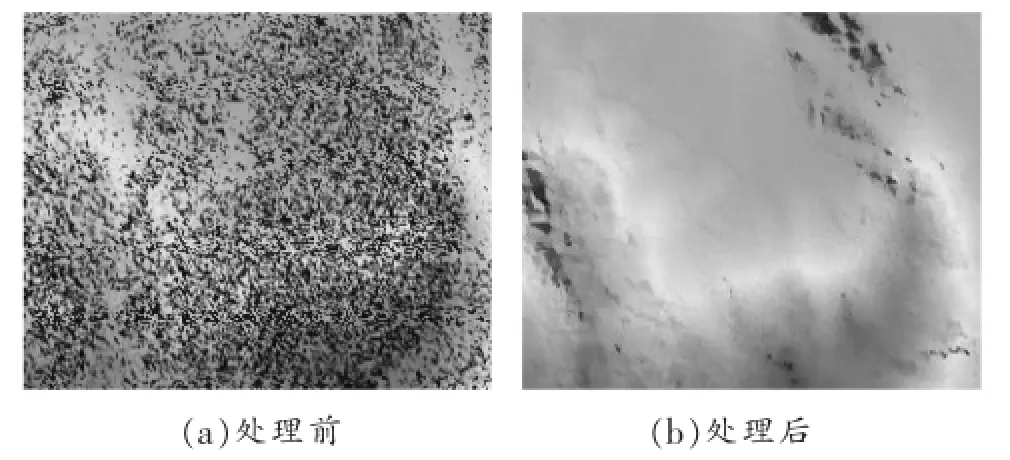
图3 山地中点云处理效果
(3)高速公路、河流等与周围的地物相比,高度变化一般较明显,但没有孤立的明显突出的点出现。
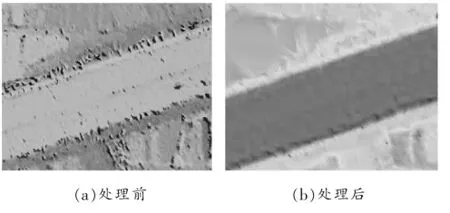
图4 高速公路点云处理效果
(4)立交桥、高架路、桥梁等架空于地面或水面之上的人工地物范围,保留地面或水面上的点云数据。
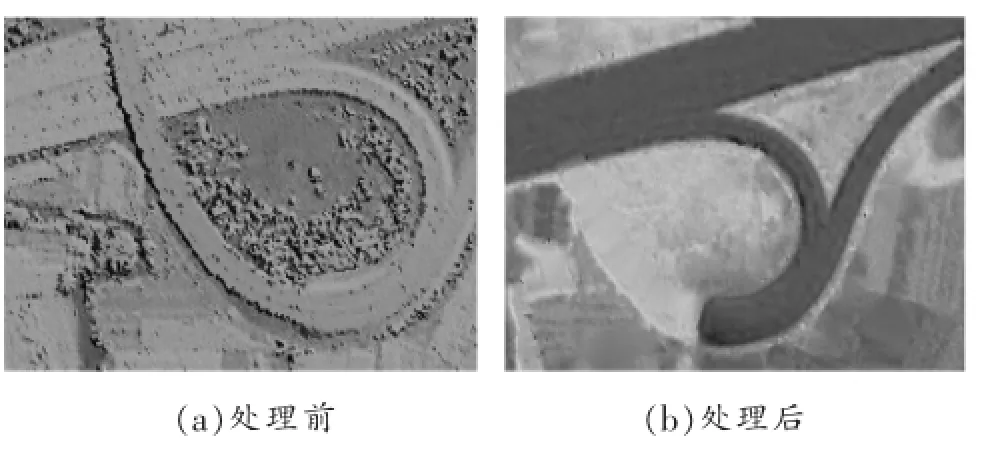
图5 立交桥点云处理效果
(5)土堤、拦水坝、水闸等建筑物底部与地面相接的,保留这些地物顶部的点云数据。
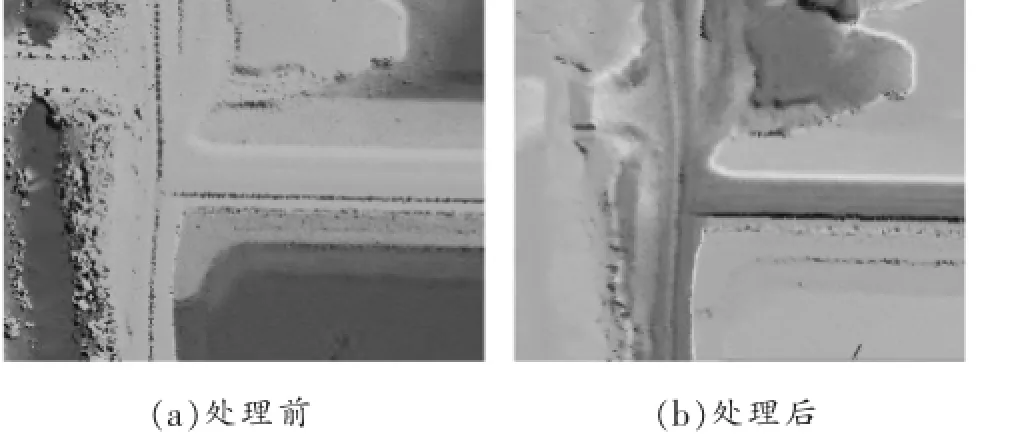
图6 堤坝点云处理效果
4 机载LiDAR点云精处理细节
正确高效的处理方法是点云精处理的基础,以下是几个实际作业过程中要注意的处理细节。
4.1 快捷键设置
精处理的过程中需要大量的手工操作,所以应对常用的功能设置相应的快捷键。在实际处理中,设置合理快捷键能使效率提高一倍左右。
实际的操作中常用的功能一般是classify above line(对划线上部点云进行分类)、classify below line(对划线下部点云进行分类)、classify using brush(分类刷)等三个点云分类功能按钮和draw vertical section(提取点云切面)、rebuild editablemodel(刷新模型)、place shape(画框)、add point to ground(加地面点)等按钮,可以根据实际需要在Microstation v8的workspacefunction keys中添加设置。
4.2 模型色表循环次数设置
在TerraSolid软件中,构建的阴影模型的高程是以色彩来区分的,在实际的处理过程中,如果作业员不能从模型中清晰的判读地貌的高低起伏,就会影响处理精度,所以灵活运用色表循环次数很有必要。
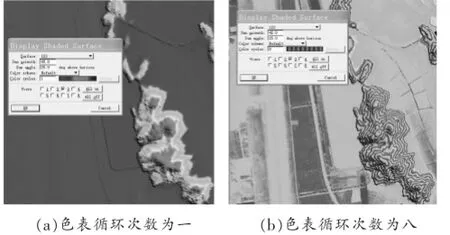
图7 色表循环次数的差异
具体的色表循环次数要按实际情况来定,次数越多,反应的细节越多,以浙江沿海地区为例,色表循环1到8次即可,在平地或山地一般循环1-3次,在平山地处根据山的高度可适当增加循环次数。
5 特殊区域处理方法
因为雷达技术本身的缺陷和地面情况的不同,在实际点云精处理过程中会存在一些难点。以下是对常见的3种难点地形处理的方法。
5.1 山塘水库区域
山塘水库区域往往没有点云回波,造成本来应该水平的静水面有高低起伏,不符合实际情况,在DEM反生成等高线中也会产生等高线落水的问题。所以必须对有起伏的山塘水库区域处理,以符合实际情况和作业要求。在实际作业过程中,利用特征线对水面赋高程值的方法能有效解决这个问题。
具体的步骤如下:
(1)根据DOM和已有的DEM模型勾画山塘水库的范围线。
(2)对范围线赋高程值,高程应略低于周围地貌。
(3)利用范围线将山塘水库内地面点分类到非地面点中。
(4)将范围线导出为离散点,再将这些离散点作为参与DEM构建的点加入到原点云中。
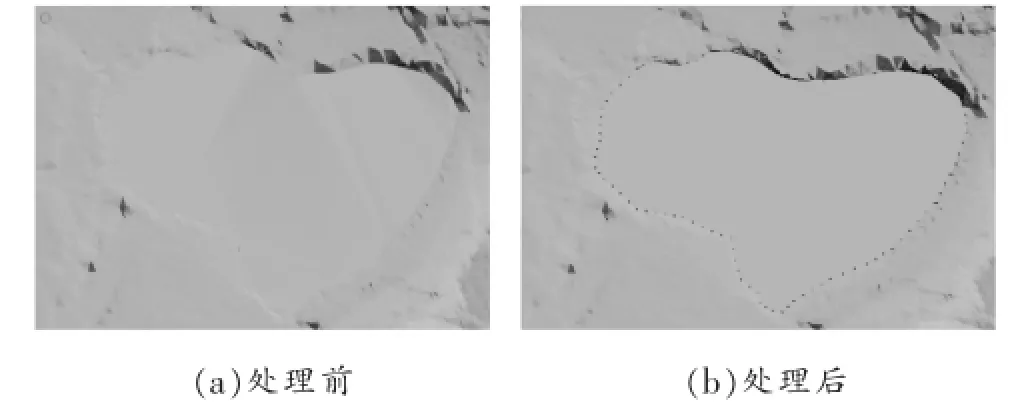
图8 山塘水库区域处理效果
5.2 成片茂密植被区域
由于激光雷达本身的局限性,成片茂密植被区域往往只有少数的地面点。在自动滤波过程中往往会把低矮成片植被误滤成地面点,有些地方甚至会出现田高于田埂路面的明显错误。在浙江地区这类区域(如大片的水稻田)很常见。这类区域是点云精处理的重点,同时也是难点。在实际的操作过程中,总结的一个相对有效的方法法如下:
(1)圈出植被覆盖区域,把区域内点云都还原成非地面点。
(2)根据植被的具体情况对已经还原的区域作参数严格的自动滤波,参数设置如下:
Max building size一般是30到60数值越小滤成地面点越多,当画的框特别小时可以设更小一点。Iteration angle在 1到 3之间,Iteration distance在0.1到0.5。
(3)对经过自动滤波的点云做人工精处理,以去除剩余明显高于地面的植被和添加误滤除的线状地物。经过如上处理成片植被茂密地区一般都能达到处理要求。
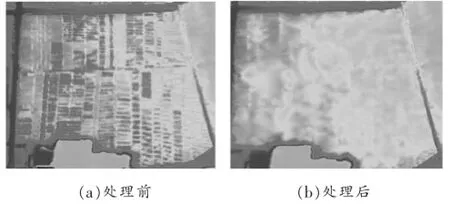
图9 成片茂密植被区域处理效果
5.3 成片池塘区域
由于自动滤波的局限性,成片池塘区域的塘埂往往会被滤掉一部分保留一部分,严重影响DEM的精度和美观度。由于这种区域塘埂数量较多,所以单一做切面补塘埂的方法会耗费大量的人工处理时间。在实际的操作过程中也总结出了相对有效的方法,和成片茂密植被区域的处理方法类似,但是自动滤波的参数不同,Iteration angle在10到20之间,Iteration distance在1到5之间比较合适。在不增加非地面点的前提下,用自动滤波获得缺失塘埂的方法能提高生产效率。
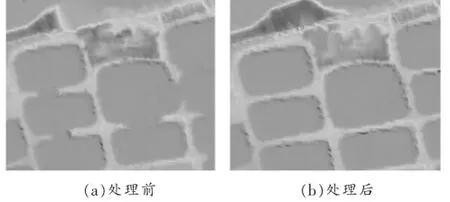
图10
6 结束语
随着科技的发展,雷达技术在测绘领域中的运用会越来越广泛。但新技术的成熟必须经过一段时间的探索和总结。本文总结了雷达点云数据精处理过程中的一些经验,能为实际的雷达点云精处理提供一些参考和借鉴。
[1]张小红,刘经男.机载激光扫描测高数据滤波[J],测绘科学,2004,29(6):50-52.
[2]张小红 机载激光扫描测高数据滤波及地物提取[D],[博士学位论文],武汉大学,2002.
猜你喜欢
国际人才交流(2022年10期)2022-11-01 00:54:42
河北地质(2022年2期)2022-08-22 06:24:04
现代苏州(2022年9期)2022-05-26 01:34:49
动漫界·幼教365(大班)(2022年4期)2022-03-26 13:18:28
特区文学·诗(2021年6期)2021-12-22 01:02:51
中国房地产业·上旬(2020年11期)2020-12-28 06:59:42
石油化工建设(2018年1期)2018-07-10 09:49:50
现代园艺(2017年23期)2018-01-18 06:58:12
浙江林业(2015年12期)2015-12-12 02:53:06
应用海洋学学报(2015年2期)2015-11-22 07:36:28
