
基于超声驱动器的岩石样品采样设备
2015-12-28 07:40白永明时运来
机械制造与自动化 2015年3期
白永明,时运来
(1. 无锡工艺职业技术学院,江苏 宜兴 214206; 2. 南京航空航天大学,江苏 南京 210016)
基于超声驱动器的岩石样品采样设备
白永明1,时运来2
(1. 无锡工艺职业技术学院,江苏 宜兴 214206; 2. 南京航空航天大学,江苏 南京 210016)
摘要:超声驱动器是近几十年发展形成的新型驱动装置,因其具有一些显著优点,在某些特殊领域有着较好的应用前景,特别适合在深空探测使用。针对现阶段外太空研究中样品取样设备的需求和已有的关于超声驱动器研究成果,提出了研制基于超声驱动器的岩石样品采样设备并进行了一些试验研究,取得了一些初步研究成果。
关键词:超声驱动器;岩石样品;采样设备
0引言
据美、俄对月球探测,发现月球等外星球上含有丰富的矿藏,为人类提供了新的能源来源。为了准确了解星外岩石的构成和含量,必须对岩石进行采样分析。但外太空上几乎是真空环境,而且温差变化特别大,在此恶劣的环境条件下完成岩石样品采样的工作一般靠无人操作的设备进行。采样设备包括采样小车、钻探器械等装置。此外,要把大量用于科考的设备送入外太空,除大推力火箭以外,更需要在科考设备的材料上下功夫,在满足使用要求的前提下必须选择质量轻的新材料。
超声驱动器是20世纪80年代成型并发展起来的一种新型驱动器,它的驱动基于压电和摩擦技术,突破传统驱动器依靠电磁驱动的机理。与电磁驱动相比,超声驱动器具有断电自锁、质量轻、低转速大力矩、工作不产生磁场也不受磁场干扰、响应快和无需传动装置直接驱动等优点[1]。
因此根据深空探测现实需要和已有关于超声驱动的研究成果,提出基于超声驱动器的新型岩石样品采样设备的研究。
1采样小车的设计[2]
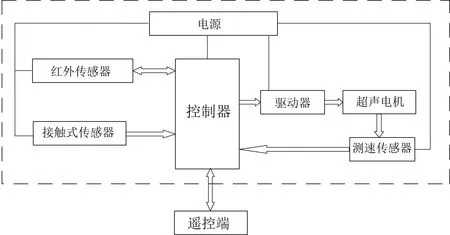
图1 小车结构原理图
采样小车总体设计的原理如图1所示,其中虚线框为采样小车部分的构成设计。遥控器发出遥感信号,控制小车的主要运动,设置在飞船舱内或者地面控制中心。当飞船在外太空着落后小车驶出舱外至设定的采样位置,由宇航员或者地面人员在CCD摄像的引导下操作遥控器控制。红外传感器和接触式传感器作为辅助控制设备,用于小车到达指定位置移动或钻探过程中有障碍物时的自主位置微调控制。红外传感器通过红外波的发射、接收检测对周围环境有无障碍物进行判断,实现非接触避障;接触式传感器即碰撞开关主要在红外线可能检测不到的某些情况下起作用,属于接触避障。控制器根据遥感信号发出控制小车的如何行走的指令;根据传感信号并在综合分析的基础上,控制小车的自主位置微调。采样区域的图像可由飞船自带的高速CCD相机摄取。
采样小车结构相对简单,主要由驱动、传感和控制等模块构成,能装载钻探器并移动至指定的采样区域,如图2所示。
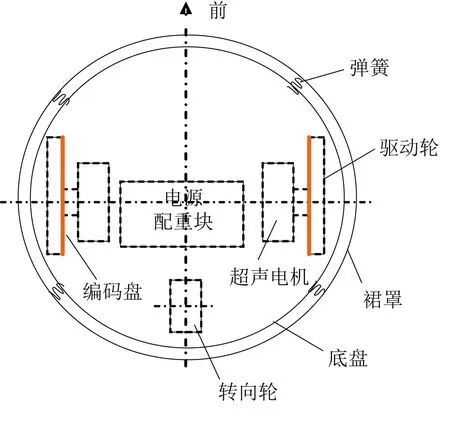
图2 模块构成
整个系统在控制模块的管理下协调工作,完成设定的目标。
1.1各功能模块的功能实现
a) 驱动模块
深空环境条件十分恶劣,为了掌握超声电机在深空环境下的性能,南航精密驱动所开展了超声电机在高低温、振动和真空环境下的试验研究,取得了一些更精确的研究数据,得出在一定温度变化范围内、真空环境下和振动条件下超声电机能正常工作[3-5]。因此选用新型的60(定子尺寸)超声电机作为驱动电机,直接驱动负载,不需要传动装置,以减小机器人的体积和质量。
超声电机直接安装在两个驱动轮上,驱动小车运动。小车运动的动作主要包括前进、后退、左转、右转,通过调节两轮的转向、转速和速差即可实现。两轮同向同速向前或向后实现小车的前进或者后退;左轮旋转右轮停止可实现小车的右转;右轮旋转右轮停止实现小车的左转,而小车的转向轮处于随动状态。超声电机的调速方式有调节驱动频率、电压和相位三种方式[6],在此选择操作相对方便的调频调速,通过调节超声电机谐振点附近的驱动频率来实现超声电机转速的调节。电机驱动器就使用南航精密驱动研究所自制的超声电机专用驱动器。
b) 传感模块
小车传感器位置布置如图3所示,主要用于采样位置自主微调避障。红外线传感器红外发射管发出红外光,光电接收管接收物体的反射光,据此机器人可以判断是否有障碍物及其与之的距离,用于在前进过程中的提前避障。采用近距离红外传感器的优点是其体积小、使用方便、对环境的要求不高,而且可避开外部的干扰光线。接触式传感器(碰撞开关)布置在小车裙罩周边,当障碍物比较小或红外传感器对障碍物颜色不敏感时起作用。接触式传感器能检测到6个方位的障碍物,如图4所示。当判别出是哪个方位时,控制器就发出向相反方向运动的指令。红外线传感器与碰撞开关一起实现小车的避障功能。
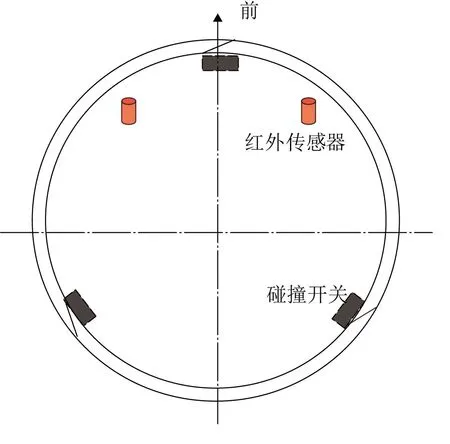
图3 传感器位置布置
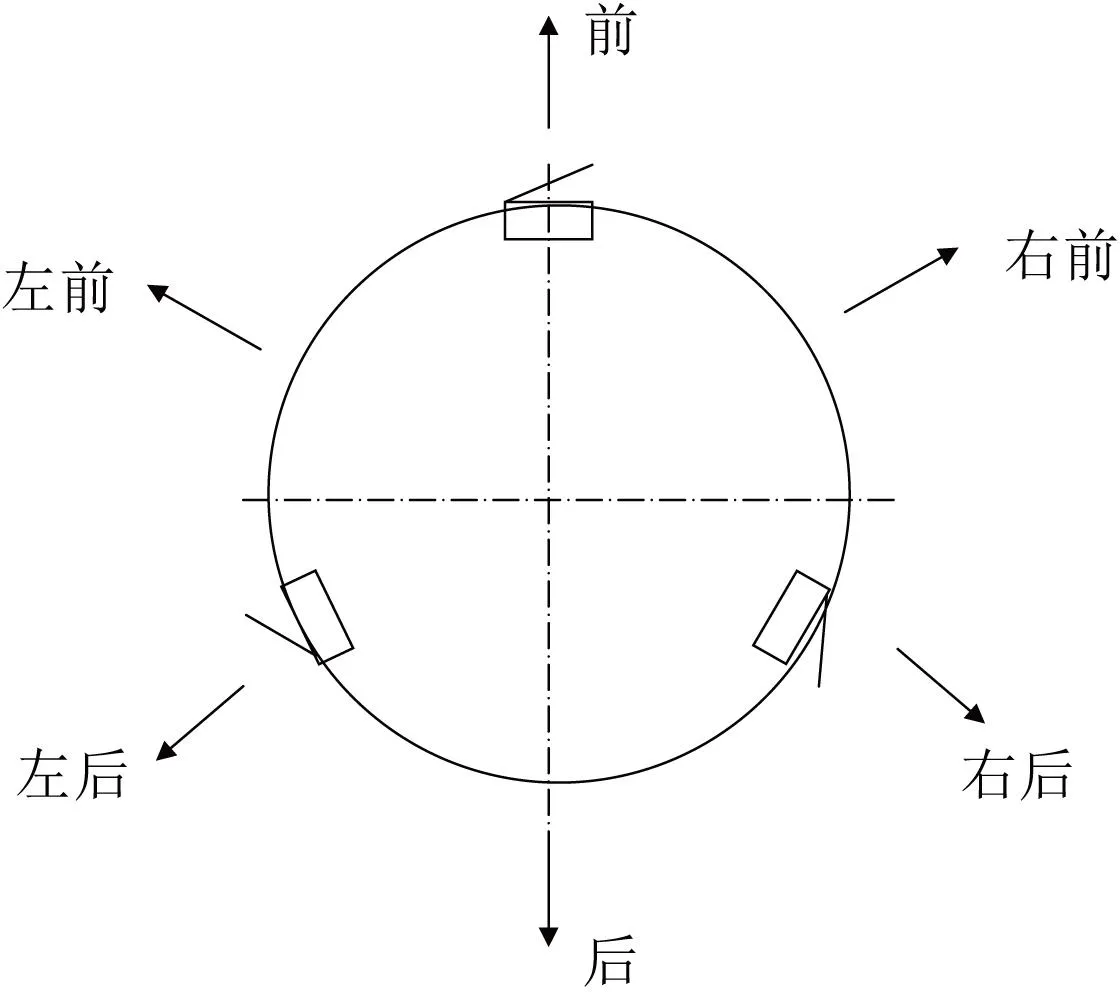
图4 六个方位避障
c) 控制模块
小车运动的轨迹相对简单,只要完成到预定位置的行走即可。处理器可以选择单片机或DSP,但DSP在运算速度、存储空间以及减少外围电路等方面具有优越性。结合采样小车工作环境的实际要求,研究的控制器选用TI公司的专门用于电机控制的TMS320LF2407A处理器。
控制器的主要功能:接收遥感信号;检测红外线、碰撞开关和转速的反馈信号。根据检测信号综合分析发出指令控制小车的运动。
制成的样车如图5所示。
图5 取样小车样车
2钻探器的设计
与其他市面上的冲击钻、电锤等钻探设备相比,超声波钻探器具有一些显著优点:结构简单,体积小、质量轻、功耗低、无需提供大的轴向力,不存在运动副,不需要润滑、钻头无需刃口,不存在钻头磨钝问题,整个装置无旋转运动,无需保持旋转力矩;可在高温或低温条件下工作等,非常适合深空探测研究使用。当前国内、外也正在开展此项研究,期望将其用于深空探测研究中。
兰杰文振子结构,如图6所示,是一种利用压电陶瓷的纵向效应(d33)构造的超声压电振子,具有结构简单、效率高、允许输入较大的电功率、振子的输出端具有较高的振动速度的位移振幅和聚能作用等优点。因此采用兰杰文振子结构设计钻探器。
图6 兰杰文振子
当前已有的大多数超声加工技术是利用变幅杆来放大兰杰文振子的振动,经研究证实此种结构的振幅太小,对一些坚硬物质的破碎效果不佳。经过适当改进,增加能量积蓄/转换部件—自由质量(图7),取得较好的试验效果[7]。
图7 超声钻探器实物
图8和图9为上述超声波钻探器钻探的实际效果。
图8 混凝土钻探效果

图9 砖块钻探效果
3结语
设计的小车能在一定的地表环境行走,基本达到设定的要求。但是要用于深空探测还需开展更深入的试验,结构上还需改进。
设计的超声钻探器也达到预期目标,能钻探混凝土等坚硬材质。
研究拓展了超声驱动器的应用领域,为超声驱动器在月球探测中的应用作了一些探索性研究,但外太空物质采样设备的研制是一个综合工作,还需要联合多个相关单位共同攻关。
参考文献:
[1] 赵淳生,朱华. 超声电机技术的发展和应用[J]. 机械制造与自动化,2008,37(3): 1-9.
[2] 王宏建. 超声电机驱动的自主吸尘机器人研制[D]. 南京:南京航空航天大学,2006:9-14.
[3] 郑伟,赵淳生. 低温环境下超声电机定子特性[J]. 南京航空航天大学学报,2009,41(1):1-4.
[4] 郑伟,朱春玲,芦丹,等. 高温环境下旋转型行波超声电机性能研究[J]. 中国电机工程学报, 2008,28(21):85-89.
[5] 苏娜,芦丹,赵淳生. 超声电机在真空环境下的负载特性试验研究[J]. 振动、测试与诊断,2006,26(2):151-153.
[6] 白永明. 激光多普勒面内振动测试系统的研发[D]. 南京:南京航空航天大学,2007:25-30.
[7] 郭俊杰. 新型超声波钻探器的研究[D]. 南京:南京航空航天大学,2008:5-1.
欢迎投稿欢迎刊登广告欢迎订阅
Lunar Soil Sampling Equipment Based on Ultrasonic Actuator
BAI Yong-ming1, SHI Yun-lai2
(1.Wuxi Institute of arts and Technology,Yixing 214206, China;
2. Nanjing University of Aeronautics and Astronautics,Nanjing 210016, China)
Abstract:Ultrasonic actuator is a new drive device developed in recent decades. Because of its significant advantages, it has a good application prospects in some special fields, especially suitable for use in deep space exploration. According to the demand of sampling device in outer space research, and the existing research results on ultrasonic actuator development, a rock samples sampling equipment is desiged based on ultrasonic actuator, then some experimental researches are made and some preliminary research results are got.
Keywords:ultrasonic actuator; rock specimen; sampling equipment
收稿日期:2014-04-22
中图分类号:TH248
文献标志码:B
文章编号:1671-5276(2015)03-0080-03
作者简介:白永明(1982-),男,江苏宜兴人,硕士,讲师,从事机电一体化研究。
