欧洲“罗塞塔”释放“菲莱”成功着陆
2015-12-26 03:27:12刘嘉宁北京空间科技信息研究所
国际太空 2015年2期
刘嘉宁(北京空间科技信息研究所)
北京时间2014年11月13日06∶03,欧洲航天局(ESA)“罗塞塔”(Rosetta)探测器团队最终确认“菲莱”(Philae)着陆器已附着在彗星表面,偏离预定位置“J”点1000多米,着陆器位于悬崖底部位置,光照严重不足,导致包裹的太阳电池片不能提供足够的电量。但“菲莱”若干科学载荷工作正常,在主电池电量消耗至休眠电量前传回了关于67P/楚留莫夫-格拉西门克彗星(以下简称67P彗星)的大量重要数据。目前,“菲莱”已处于休眠状态,尽管其着陆过程颇多曲折,但创造了历史,成为人类首个软着陆于彗星表面进行探测的飞行器。
1 着陆过程磨难重重,着陆地点差强人意
北京时间2014年11月12日16:35,“罗塞塔”成功释放“菲莱”,28min20s延时之后,北京时间17:03,ESA控制中心收到确认消息,“菲莱”已经与“罗塞塔”安全分离。
由于67P彗星重力为10-3m/s2,逃逸速度仅为0.48m/s。为了防止着陆后被弹飞,“菲莱”以3.5km/h的速度做自由落体运动缓慢地朝着彗星表面下降,22.5km的路程走了约7h。
“菲莱”的着陆过程可谓磨难重重。在分离前的检查中发现,“菲莱”顶部用于抵消其着陆时反冲力的冷气喷射装置(氮气发动机)出现故障,且无法修复。“菲莱”的冷气装置由气体贮存罐和穿刺机构构成,穿刺机构含有2根刺针(1根冗余),用于刺破储气罐上的蜡封。但是传感器传回的数据显示,罐内气压并无变化,据“罗塞塔”团队工程师分析原因可能是穿刺机构失灵导致。经过紧张研究之后,ESA的工程师们仍然决定让“菲莱”按计划登陆。
当快要接触到彗星表面时,科学家团队发现用于固定的2个“鱼叉”装置并没有弹出,只剩下3个着陆腿上的冰螺栓能正常工作,原有的3个保险措施只剩下1个正常工作,这让“菲莱”能够附着在这颗重力微小彗星的希望变得渺茫。
接下来的着陆过程中可谓惊心动魄,第一次着陆(北京时间11月12日23:34)虽然准确地落在了着陆点,但由于缺少固定装置,“菲莱”没有固定下来,而是以38cm/s的横向速度向前弹跳翻滚了近113min,最远时距彗星表面450m高。

“菲莱”上的“鱼叉”装置
“罗塞塔”团队根据彗核红外与可见光分析仪(CIVA)、“罗塞塔”着陆器成像系统(ROLIS)两者传回影像的数据分析显示,预定着陆点“J”表层并非原来预想的由多孔的砂石构成,有很大可能是一层薄土覆盖在一块坚硬的岩石上,因此“菲莱”第一次着陆后被弹回了如此远的距离。
根据搭载的“罗塞塔”磁强计与等离子体监测仪(ROMAP)数据记录,“菲莱”经历了第二次弹跳(北京时间11月13日01:25),以横向速度3cm/s又向前翻滚了7min后才停在最终位置,偏离预定地点千米有余。
姿态稳定后,“菲莱”上搭载的6台彗核红外与可见光分析仪拍摄到彗星表面的全景照片显示,“菲莱”的左侧地形较平缓,右侧的“悬崖”距离很近,有可能一条腿悬空,一条腿撑在水平地面,另一条腿靠在崖壁上。
据“罗赛塔”项目主管Fred Jansen表示,“菲莱”目前处于悬崖的底部,那里阳光严重不足,“菲莱”上包覆的太阳电池片在1个67P彗星日(12.4h)里只能接收到1.5h的有效照射,而主电池电量只能维持60h。按照设计,“菲莱”在主电池电量耗尽后将依靠太阳电池供电,太阳光照不足意味着“菲莱”将无法继续运转。

“菲莱”即将降落到彗星上
为了尽可能地延长“菲莱”的探测时间,工程师已发送包括利用3个着陆腿上的冰螺栓将探测器高度提升4cm、旋转探测器主体35°的指令来调整太阳电池板的角度,使其能最大程度地接触阳光。但这于事无补,而且在完成上述机动调整后电池电压大幅下降,已接近21.5V的警戒线。
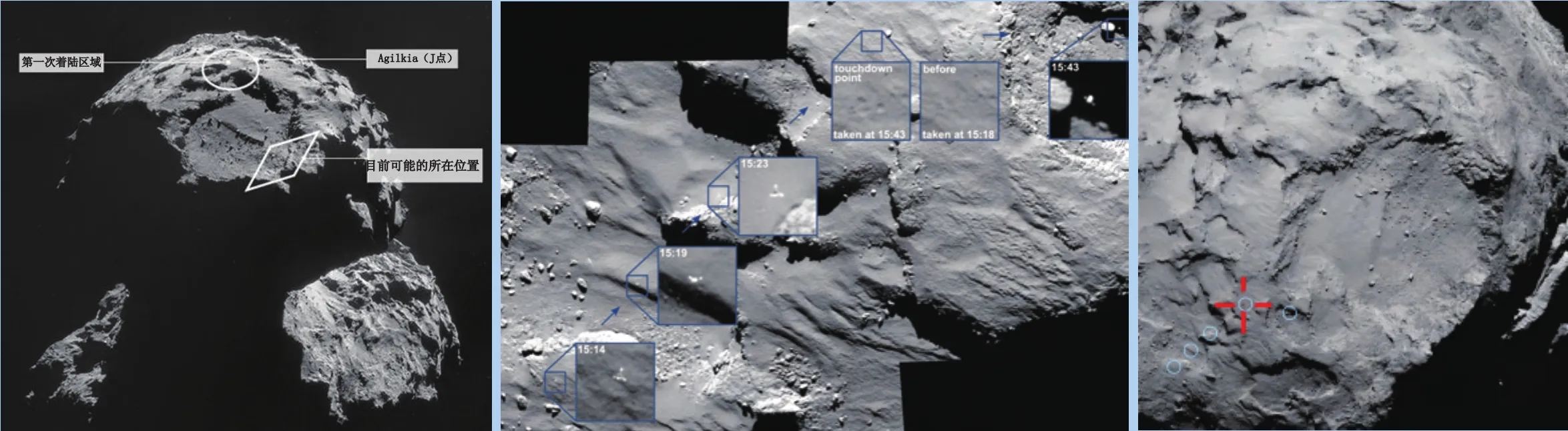
“菲莱”可能的着陆位置
不过,研究人员表示,即便电池耗尽而不再收发信号,“菲莱”着陆后完成了一些实验并已传回彗星表面和浅层物质的分析数据,这已经非常令人振奋。“菲莱”项目负责人Stephan Ulamec称,“罗塞塔”着陆器成像系统、彗星采样与成分实验件(COSAC)、托勒密实验件(Ptolemy)等科学载荷已经完成了大部分探测任务,样品与分发装置(SD2)上的钻头完成了从彗星表面以下25cm处取样并送入成分分析室的预定任务,但表面与亚表面科学多用途遥感器(MUPUS)未能达成试验目标,该遥感器上探针的钻取能力是基于20世纪80年代“乔托”(Giotto)探测器对“哈雷”彗星(1P/Halley)的认识所设计的,但67P彗星表面实际硬度大于2MPa(抗拉强度:砂石5~15MPa,花岗岩5~20MPa),探针无法穿透,没有获取表层下的数据。
“尽管经历了3次着陆才最终稳定下来,但探测器上的载荷在艰难的环境下表现很好,‘菲莱’目前已取得80%的主要科学实验数据,取得了难以置信的科学成功,我们为它感到万分骄傲。”Ulamec在接受采访时说,“根据目前主电池的状态,下次通信的可能微乎其微,团队将‘菲莱’置于休眠状态,希望在靠近太阳的过程中,太阳电池片能够获得足够照射,重新激活‘菲莱’。”
2 着陆之后的工作
按照原计划,着陆后“菲莱”上的设备将开始对彗星地表的密度和热性质进行观测,气体分析仪将帮助检测并确认那里可能存在的任何复杂有机质。与此同时,其他设备也将对彗星的磁场以及彗星与太阳风之间的相互作用进行观测—太阳风是一种源自太阳的高能粒子流。“菲莱”还携带有一部钻机,其大约可以钻进彗星地表之下20cm深,并将样品送入其内部的测试系统。
现在,“菲莱”已经着陆在彗星上,但可惜的是由于3个固定装置中的2个都出现故障,造成其未能平稳地附着在预定着陆点,而是位于一个悬崖底部的位置。主电池电量耗尽和太阳能电池接受光照严重不足,以及着陆器姿态倾斜过度,导致部分科学实验未能完成,但“菲莱”还是传回了大量有效数据,只不过原计划利用太阳能电池工作到2015年3月的扩展任务将无法实现。但“菲莱”也并不是完全没有“苏醒”的希望,由于目前彗星朝太阳飞去,预计2015年8月到达近日点,彗星与太阳的距离将缩小到1.8×108km以内,期间彗星温度会持续升高,使由冰和尘埃构成松散结构的彗星表面物质剥离和喷射,此时彗星表面每秒钟都将会喷射出数以百吨计的物质,借此有可能帮助“菲莱”调整到一个较好的位置,但也有很大的风险将其吹飞。
“菲莱”在彗星表面工作期间,“罗塞塔”将做分离后轨道(post-separation path)到环绕轨道的机动,并于2014年12月3日返回距彗心20km的圆形环绕轨道,进行为期10天的彗星整体高精度成像与喷发物质收集工作,之后其将返回30km轨道。伴随彗星继续运行至少1年,观察彗星在逐渐接近太阳时发生的变化。期间,它将进行若干次大胆的掠飞,最近处距彗心仅为8km,用携带的载荷对愈发“活跃”的彗星进行拍照和喷射物质采样分析。
3 一些启示
深空探测任务实施难度大,设计面临任务需求和探测目标恶劣环境等方面的重大挑战
地外星体的深空探测任务设计面临着任务需求、星表环境和设计需求等方面的挑战:
1)在任务需求方面,由于深空探测任务普遍耗资巨大,为了尽可能多地实现科学目标,提高投入产出比,因此都会采用“主任务+扩展任务”的模式。这样长周期的工作状态,对探测器的热控、电源、通信、自主控制等方面的设计寿命和可靠性都提出了很大的挑战。
2)在环境局限方面,目标星球的表面环境是影响像“罗塞塔”这样需要软着陆到行星表面进行原位探测任务的主要因素,表现在对重力、尘埃、长时间辐射、巨大温差和多变地形的耐受力等方面。
3)在设计需求方面,深空探测器的设计面临以下挑战:保证探测功能的前提下做到质量与尺寸的最小化;所有关键系统能长时间可靠运行;高效稳定的数据传输系统保障宝贵的探测数据及时传输;持续的能源供应与可靠的热控系统。
同时我们注意到,“菲莱”在3次跳跃后落入“坑”中,虽经过机身旋转和抬升,但机身角度仍未得到有效校正,使太阳能电池未能接收足够太阳光,扩展任务取消。因此,执行原位探测任务的探测器应模仿一些行星巡视器,增加可控弹簧、伸缩腿、小反冲火箭之类的装置,实现恶劣环境下的“脱困”。
高可靠的进入、下降与着陆技术是实现软着陆探测的关键
“罗塞塔”计划作为ESA深空探测的旗舰任务,其上搭载的科学载荷和探测器的轨道都经过了精心的设计。10年中,“罗塞塔”3次飞掠地球,1次飞掠、2次进入小行星带,4次飞掠太阳,巧妙地利用“引力弹弓”效应为自己增加动能,达到追赶上67P彗星的目的,这些精准的轨道机动可为完美。然而,万里长征的最后一步却差强人意。由于冷气系统和锚定“鱼叉”装置的固定双保险在着陆过程中均告失效,“菲莱”精确地落在着陆点后却未能平稳地停下来,导致一些重要的科学载荷未能正常工作以及后续扩展任务的取消。这个教训充分说明了对目标星体实施探测成功的关键在于高可靠进入、下降与着陆(EDL)技术的保障,进入、下降与着陆方案还需根据目标星体的表征环境和探测器结构“因地制宜”。像67P彗星这样不存在大气,引力极低,并且存在表面碎屑喷射的环境,就与在火星着陆截然不同。

总装中的“罗塞塔”与“菲莱”着陆器
需要建立健全探测目标模拟仿真环境,对探测器的部分和整体进行全面的技术及可靠性验证
“罗塞塔”上搭载的冷气系统和锚定“鱼叉”装置的失效,致使其未能稳定着陆,这是造成部分科学探测任务未能完成的主要原因。同时我们还应注意到,由于对67P彗星表面环境的评估不足和基于老旧资料来设计科学载荷,使用其上携带的一些科学载荷,即使正常工作也不能物尽所能。“罗塞塔”在20世纪70年代开始规划到今天实施,时间跨度超过40年,即便从正式被批准进入实施阶段,也已经过去了超过20年的时间。漫长的设计周期带来的问题是,仍使用之前探测器飞掠探测获得其他彗星的少量资料来对67P彗星表面环境进行的评估,而且当时的技术与设计水平也是限制载荷探测能力的重要原因。
ESA在1993年正式立项“罗塞塔”计划前,仅仅进行过一次对于中周期彗星“哈雷”的探测(“乔托”),而当时人类总共的彗星探测次数不超过5次,而且均为飞掠探测。“菲莱”上的表面与亚表面科学多用途遥感器所含探针的测试对象是低密度的疏松物质:多孔混凝土、沙、雪和绝热泡沫等。然而,67P彗星表面物质屈服强度远超过2MPa,大于探针的钻取能力,导致该项重要试验失败。因此,要有所针对地研究目标星球的环境特点,综合分析大气、重力、气候变化、地形等多种因素对探测器的影响,筛选出影响较大的因素,建立综合性模拟试验场,整合进入、下降与着陆过程中的关键技术,对探测器的部分和整体,与关键技术指标进行反复测试。
4 结束语
“罗塞塔”从2004年发射到2014年最终赶上彗星,经历了漫长的10年艰辛,期间3次飞过地球、1次飞过火星,沿着复杂的轨道围绕太阳运行超过6.0×109km,终于得偿所愿。这几乎是整整一代人的青春,一代科学家整个的职业生涯都奉献在了这个伟大的世纪项目上,同时这也是人类走出地球、探索太空的一场盛宴。从某种意义上说,“罗塞塔”项目几乎是让科幻成真,而这一项目实际上也在帮助我们解答一个终极问题:在宇宙中,我们是孤独的吗?
猜你喜欢
西湖(2022年10期)2022-10-19 03:52:28
小哥白尼(趣味科学)(2022年5期)2022-08-15 08:34:58
小聪仔(科普版)(2020年12期)2021-01-18 09:17:02
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年7期)2019-08-27 04:05:47
小学科学(2019年12期)2019-01-06 03:38:45
太空探索(2016年1期)2016-07-12 09:56:10
太空探索(2014年9期)2014-07-10 13:06:30
太空探索(2014年9期)2014-07-10 13:06:29