
基于加速度传感器MMA8451的滑坡监测系统设计
2015-12-24 10:25高益,郭峰林,戴立
武汉轻工大学学报 2015年3期
通信作者:郭峰林(1969-),男,教授,E-mail:cflguo@gmail.com.
基于加速度传感器MMA8451的滑坡监测系统设计
高益,郭峰林,戴立
(武汉轻工大学 数学与计算机学院,湖北 武汉 430023)
摘要:采用MMA8451三轴速度传感器设计出一个低功耗、高精度的滑坡监测仪器。基于这款高性能传感器,ZigBee模块终端节点(TND)将位移棒测得的各方向加速度信号传递到中心节点(CND),通过PC端软件算法将加速度信号转换成对应倾角。由倾角与两个位移棒间的距离可求得该位移棒的相对偏移距离,将各相对偏移距离累加算出倾斜距离。通过实验验证表明:系统功耗小,精度高,速度快,能够很好地完成了对滑坡的监测,并且能够设定安全阀值,对山体滑坡等自然灾害进行预警。
关键词:滑坡监测;三轴加速度传感器;ZigBee模块
收稿日期:2015-03-31.修回日期:2015-06-15.
作者简介:高益(1990-),男,硕士研究生,E-mail:workspace27@163.com.
文章编号:2095-7386(2015)03-0080-04
DOI:10.3969/j.issn.2095-7386.2015.03.017
中图分类号:TP 212;TB 535
Design of landslide monitoring system
based on acceleration sensor MMA8451
GAOYi,GUOFENGLin,DAILi
(School of Mathematics and Computer Science,Wuhan Polytechnic University,Wuhan 430023,China)
Abstract:Using MMA8451 three axis acceleration sensor to design a low power, high precision instruments of landslide monitoring. Based on this high-performance sensor, ZigBee module terminal node (TND) passes the rod displacement measured inclination to the central node (CND), which will be accelerated into angle through PC client software algorithm .As inclination and the distance between the two displacement rods that can obtain relative displacement of the displacement bar, with each relative offset accumulation method finding the maximum offset. The experiment shows that: the low system power consumption, high precision, high speed, so can be well done for landslide monitoring. At the same time,the ability to set security thresholds for landslides and other natural disaster warnings is of high availability .
Key words:landslide monitoring; three axis acceleration sensor; ZigBee module
1引言
在传统滑坡监测和预警中,主要是通过现场监测、室内试验及理论计算的方法来进行研究的。但是现场监测需要人工采集数据,工作量大,也不可能在雷雨过程中进行数据采集,同时由于山体常有泥石流和滚石流等危险,给人员安全带来隐患。GPS技术能够实现对滑坡体与地表水平位移和垂直位移的监测,具有全天候、高精度、全自动等优点。但在复杂地形区域卫星信号易被阻挡,多路径效应较为严重,对精度有一定的影响,而且无法监测地面以下的岩体变化。
笔者设计完成的滑坡监测系统能够探测到地面以下岩体的位移变化,因此可以较好地监测牵引式滑坡(滑坡体下部先变形,使上部岩体失去支撑,从而使上部岩体也随着变形移动,由下部带动上部发生的滑坡)的发生,采用ZigBee模块无线采集技术来代替人工测量的装置,保证了监测人员安全。文中,ZigBee终端节点(Terminal Node Data)简记为TND,ZigBee中心节点(Central Node Data)简记为CND。系统有调试和监测两种工作状态,TND进入正常监测状态后会定期向CND发送监测数据。不发送期间,CND进入休眠状态,使功耗降到最低。当监测到的滑坡位移大于设定的安全阀值时,系统发出警报,达到预警的目的。
2硬件系统组成
该滑坡监测系统为了实现对滑坡进行安全、准确、实时地检测,在一个长2.5 m的软管中从顶部往下以50 cm的间隔顺序放入5个加速度传感器(位移棒),与单片机MSP430F5342一起组成信号采集模块,垂直埋入山体中,这样可以监测地下不同深度的土层位移变化。设定初始软管竖直状态为零状态。当软管随山体发生偏移时,通过加速度传感器对加速度信号进行采集,单片机MSP430F5342将接收到的传感器信号进行处理,通过RS485串行通信将各个位移棒(图中圆点)采集的信号集中传送到ZigBee终端节点(TND),经无线传输到数据控制中心的ZigBee中心节点(CND),再由USB通讯电缆与PC机连接,通过软件编程进行数据分析与计算,将偏移位移及偏移图像准确在PC端显示。系统框图如图1所示。

图1 系统框图
2.1信号采集模块
信号采集模块电路主要由三轴加速度传感器和MSP430F5342单片机组成。MMA8451三轴加速度传感器,数字I2C输出,量程有±2g/±4g/±8g可选,8位/14位精度(最高位表示正负,根据量程确定整数位,如±4g,则是最高位往后两位为整数位,剩余为小数位),电源供电1.95—3.6 V可选。输出数据速率从1.56 Hz到800 Hz。有两个可编程的中断引脚,7个中断源。可检测自由落体、运动、脉冲、振动、倾角等。典型应用有:电子罗盘,静态姿态、运动检测,笔记本电子书等便携设备的翻滚、自由落体检测,实时的方向检测可用于虚拟现实设备或3d游戏中的位置检测,便携设备的节能应用中的运动检测等。本系统利用该加速度传感器检测倾角的特性。加速度方向输出如图2所示。

图2 加速度方向
当加速度传感器发生倾斜,对应的X、Y、Z三轴就会产生不同的加速度信号输出,由不同方向的加速度信号通过编程算法得出相应的倾角。
模块控制部分采用TI公司的MSP430F5342单片机,内部自带的12位A/D转换器和DMA控制单元,可以分别为系统采样电路和数据传输部分采用,使得系统的硬件电路更加集成化、小型化,适合各种功率要求低的场合。
两种主要芯片都具有低功耗的特点,由锂电池对组成的模块电路进行供电,能够保证系统稳定运行。该模块将物体移动过程中的加速度信号进行采集。
2.2ZigBee模块
ZigBee模块内嵌串口具有点多点和点对多点的通讯协议(本系统采用点对多(PMP)通讯协议),采用串口透传方式,串口通信参数:9600,n,8,1,通信频率:2 450 MHz,支持空中升级固件或配置远程模块信息。将无线通讯产品的复杂的射频电路集成在一起,将无线通讯产品复杂的通讯协议内嵌到内置的8051单片机里,整体模块具有体积小,集成度高,并且在无线传输距离、功耗、组网规模、安全方面都具有明显的优势[4]。ZigBee组网模式如图3所示。

图3 ZigBee组网模式
TND的任务是定时采集所辖的位移棒(简记为Bar,一般有多根)的倾角,并传输到CND。TND一般有多个。CND的任务是接收各TND传来的位移棒倾角数据,并协调各TND同步休眠与唤醒。CND只能有1个。CND和TND的网络角色均为终端设备,符合PMP组网模式。CND的本地地址指派为0X2005,目的地址可以实时指派为希望通信的某TND的本地地址。各TND的本地地址互不相同,且不得与CND的相同;各TND的目的地址都设置为CND的本地地址。
TND有两种工作状态:调试状态、监测状态,通过跳线来选择。
(1)调试状态:TND处于与CND联络状态,TND不能进入休眠,可随时接受CND的命令,包括查询、设置等命令。
(2)监测状态:TND进入正常监测状态后会定期向CND发送监测数据。不发送期间,CND进入休眠状态,使功耗降到最低。
节点间的通信协议:
(1)任何命令(或回应)都以字符串出现,以字符@开头,以字符#结束。
(2)任何命令(或回应)的第二字段都为地址,以ASCII字符串表示的十六进制数。
(3)任何命令(或回应)的第三字段都为以ASCII字符串命名的命令名,必须是英文字母、数字或下划线,且只能用英文字母开头。本字符串的长度必须是4个字符。
(4)任何命令(或回应)的第三字段为用户数据,以ASCII字符串表示。如果是数值,则为用ASCII字符串表示的十六进制数。字符数限制为2 000之内
(5)具体内容一栏中,正体字符为常量字符串,斜体字符为变量字符串,发送前需要具体赋值。
3测量原理
采集到的数据是一个3维矢量,记为g。当Bar无轴向旋转时,g的方向与Bar的方向相同。加速度三维矢量如图4所示,终端节点运动曲线由图5所示。
xxxx某Bar的重力加速度的测量值的x分量=0xxxxx,高字节在前。
yyyy某Bar的重力加速度的测量值的y分量=0xyyyy,高字节在前。
zzzz某Bar的重力加速度的测量值的z分量=0xzzzz,高字节在前。
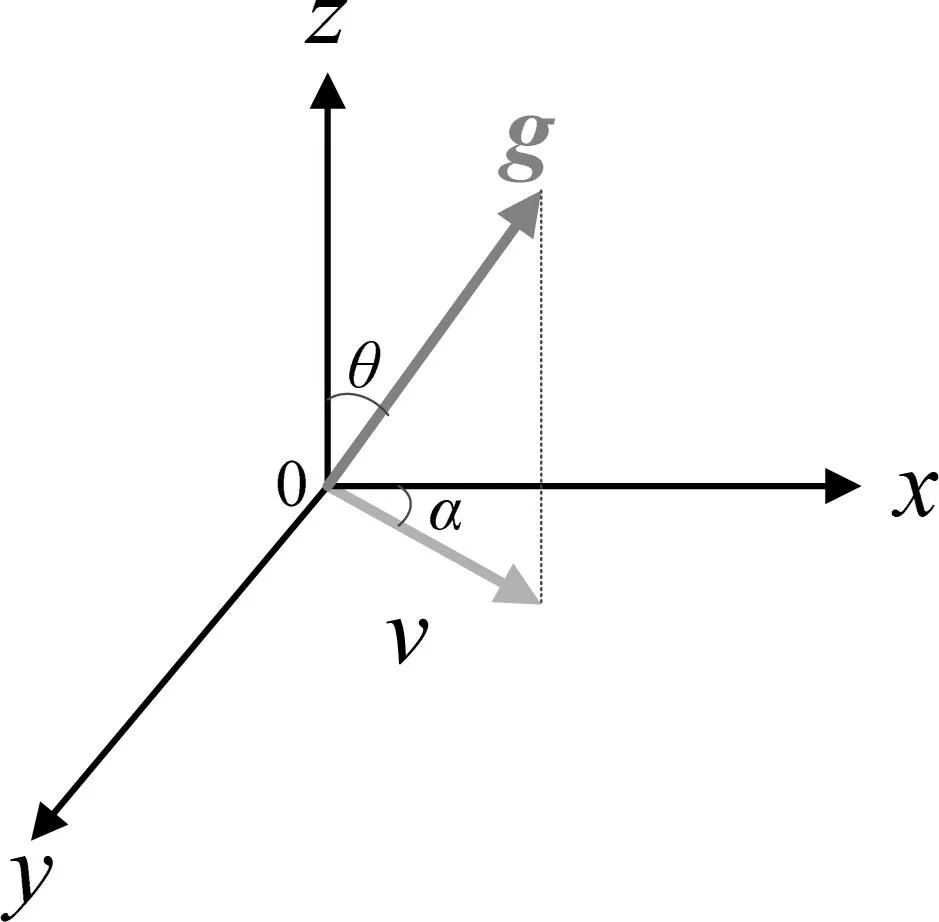
图4 加速度三维矢量

图5 终端节点运动曲线
当MMA8451(加速度测量芯片)水平放置:正面朝上时θ=0°,正面朝下时θ=180°。角度ɑ是MMA8451放置时的平面旋转角。
与z轴夹角θ的计算:
θ=arctan {[(x2+y2)0.5]/z}(结果为弧度,再化为度)。
当终端节点发生位移变化时,在节点中的各传感器(位移棒)会测得相应的加速度三维矢量,从而得出对应的倾角。两传感器之间的距离为50 cm,每个终端节点中有5个传感器,从最下一个到最上面一个依次为Bar1,Bar2···Bar5。
由Bar1得出的倾角可以求出Bar1的相对偏移距离为:
d1=sinθ1×50.
(1)
Bar2的相对偏移距离为:d2=sinθ2×50.
(2)
Bar3的相对偏移距离为:d3=sinθ3×50.
(3)
Bar4的相对偏移距离为:d4=sinθ4×50.
(4)
Bar5的相对偏移距离为:d5=sinθ5×50.
(5)
倾斜距离:d=d1+d2+d3+d4+d5.
(6)
4程序流程图
PC端通过ZigBee接收端收集到数据,并进行处理,实现对倾斜距离实时监测的功能,并作出预警。主程序流程图如图6所示。
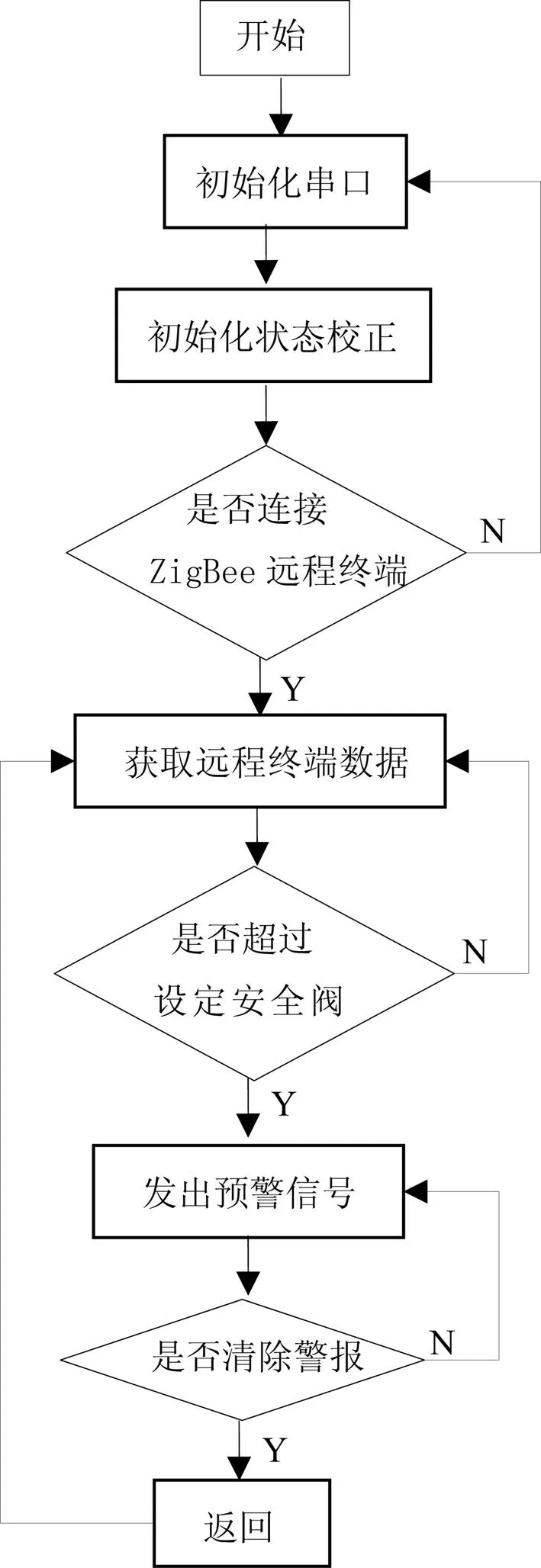
图6 主程序流程图
5监测结果
由于在自然条件下监测耗时太久且具有不确定因素,因此将测试在实验室模拟条件下进行。将信号采集模块软管垂直放置,并将下端固定,将垂直软管设为初始状态(如图6中设置为灰色)。将软管顶端偏移至直尺测量的各标准距离位移点。软管的偏移变化能够在PC端实时显示,测出倾斜距离,从而对滑坡灾害进行预警。最后将测量位移与对应的标准位移进行对比,并计算出相对误差。PC端的软件开发采用VS2008集成开发环境,使用C++语言模块化编程,为系统的调试带来了极大的方便。通过测试,证明该系统能够实现对滑坡的实时监测。图7为PC端显示的实时监测结果。

图7 测试结果
在调试状态下对测试结果的精确度进行验证,结果如表1所示。
表1调试状态下测量结果

测量次数12345678标准位移/cm510253045506075测量位移/cm5.1410.2325.8731.3246.8651.8262.2177.49相对误差/%2.82.33.484.44.133.643.683.32
在监测状态下TND进入正常监测状态后会定期向CND发送监测数据。不发送期间,CND进入休眠状态,使功耗降到最低。这样既能达到监测滑坡动向的目的,也可以减小功耗,使系统能够长时间稳定工作。
6结束语
笔者对滑坡监测的相关知识进行了介绍和分析,包括硬件电路设计、测量原理和程序流程图三部分。基于三轴加速传感器MMA8451及单片机MSP430F5342的卓越性能,使得该系统具有功耗低、精确度高、速度快等优点。相对于传统人工监测方法,GPS方法在某些方面具有较好的表现,对于促进滑坡监测系统的发展有一定意义。当然,本设计还有很多需要改进的地方,如提高数据处理速度,为信号采集模块寻求更加持久的供电方式,改进软件算法,提高测试精度。
参考文献:
[1]文海家,张永兴.滑坡预报国内外研究动态及发展趋势[J].中国地质灾害与防治学报,2004,15(1): 1-4.
[2]王莘迪,汪再兴.基于加速度传感器MMA8451的振动检测仪设计[J].电子科技,2013,27(4):118-20
[3]赖小龙,刘卫平,王勇志,等.车辆制动性能测试方法研究与装置设计[J].传感器与微系统,2013,32(10):57-60.
[4]黄双华,赵志宏,郭志,等.Zigbee无线传感器网络路由研究与实现[J]. 电子测量技术. 2007(02).
