
基于预测与跟踪的激光图像光迹快速细化方法
2015-12-24 10:25戴立,管庶安,高益
武汉轻工大学学报 2015年3期
通信作者:管庶安(1956-),男,教授,E-mail:1592547368@qq.com.
基于预测与跟踪的激光图像光迹快速细化方法
戴立, 管庶安, 高益
(武汉轻工大学 数学与计算机学院,湖北 武汉430023)
摘要:线形激光图像中光迹的细化是视觉测量的关键问题。由于激光成像过程中存在散斑噪声,导致图像中的光迹断裂,光迹粗糙,影响光迹细化的准确性和速度。针对上述问题,提出基于预测与跟踪的光迹快速细化方法。首先对激光图像进行预处理以简化计算和抑制散斑噪声,接着对光迹进行搜索与标记,然后运用基于预测与跟踪的方法快速定位光迹的中心线,完成光迹的细化。实验结果表明,该法能准确实现光迹细化,单幅图像的细化速度小于10 ms。
关键词:激光图像;线形光迹;散斑噪声;快速细化;预测与跟踪
收稿日期:2015-01-30.修回日期:2015-04-03.
作者简介:戴立(1990-),男,硕士研究生,E-mail:liiadv5@163.com.
文章编号:2095-7386(2015)03-0060-04
DOI:10.3969/j.issn.2095-7386.2015.03.013
中图分类号:TP 391
Laser image fast thinning method based on prediction and tracking
DAILi,GUANShu-an,GAOYi
(School of Mathematics and Computer Science,Wuhan Polytechnic University, Wuhan 430023, China)
Abstract:The thinning processing of light trails for the linear laser image is the key to the visual measurement problem. With speckle noise ,in the process of imaging ,light trails of the image become fractured and rough, thus affecting not only the accuracy but also the speed of the refinement of the trails.According to the above problem, this paper proposes the method based on prediction and tracking to fulfill the refinement. Firstly, preprocessing the laser image to simplify the calculation and suppress the speckle noise, then searching and marking the trails,and lastly, using the method based on prediction and tracking to locate the center line of the trails,as finishing the refinement process.The experimental results show that the method can accurately realize the thinning, at the same time ,single image thinning rate is less than 10 ms.
Key words:laser image;linear light trails; speckle noise;fast thinning;prediction and tracking
1引言
激光成像技术广泛地应用在基于机器视觉的智能检测系统当中。在工业产品品质检测中[1-2],采用三角测量的方法将线状激光束投射到待测工件表面(本文以图1(a)所示的换向器作为待测工件)[3-4],在工件表面形成激光带,运用面阵CCD相机拍摄激光带发出的散射光,形成光迹图像(图1(b)中白色部分即为光迹)。图像中的光迹就是工件被投射截面的形状或轮廓。如果被测工件存在缺陷而出现破损、形状改变等情况,会导致工件表面激光带发生变化,相应的,图像中的光迹形状也会改变。因此,通过将待测光迹图像与标准工件光迹图像进行配准,根据配准效果,就可以实现对工件的品质检测。
由于光迹图像是粗糙不均匀的曲线,进行配准前需要提取光迹的边缘或中心线点集作为配准的特征点集。提取光迹中心线点集的过程就是光迹曲线细化的过程。现有的细化方法有逐层剥离法,距离变换法[5]。逐层剥离法的基本思想是在不破坏图像连通性的原则下建立连通性判别准则,剔除图像中的可删点。该方法简单、易于实现,但是需要多次迭代,并且条件判断复杂,效率较低。距离变换法依据最终细化的线条位于原图像中心的思想,将原图像做距离变换,求出中间点集合。该方法虽避免了逐步迭代,但是中间点集合无法确保原图像的连通性。考虑到上述方法的不足,以及可能出现光迹断裂的情况,提出基于预测与跟踪的方法,并就图1所示的电机换向器部件轴孔端面的光迹图像,研究如何运用该方法来实光迹的快速细化。
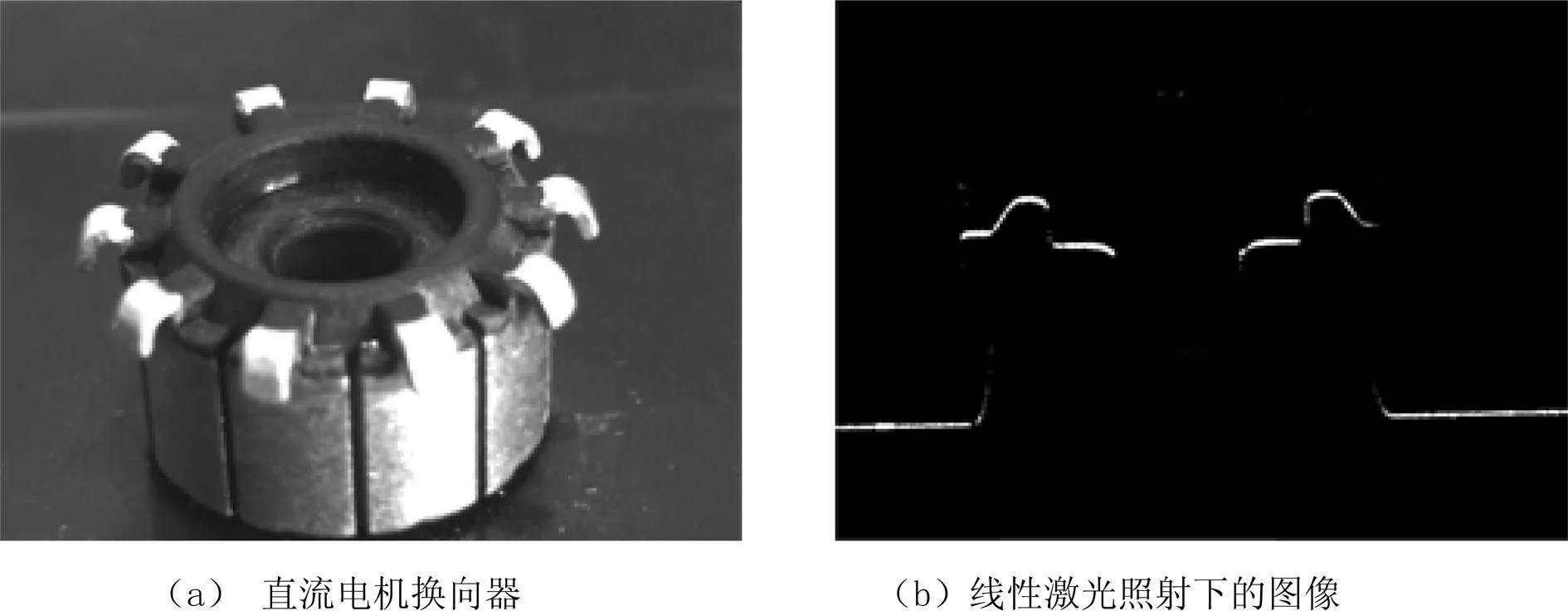
图1 直流电机换向器及其激光图像
2激光图像预处理
由于采集的图像像素量大,存在散斑噪声干扰,为了简化计算和抑制散斑,需要对原图像进行预处理操作,包括图像滤波、二值化处理以及搜索和标记目标光迹等。
因为相机和激光发射器的安装位置相对固定,目标光迹主要分布在图像中间部分。将图1(b)按像素点灰度值大小向左侧竖直方向投影,获得光迹的分布情况,剔除下半部分两条干扰的激光亮线,确定中间部分目标光迹的上下边界,以缩小滤波范围,提高运算效率。
为了抑制散斑噪声[6-7],使光迹平滑,提出基于邻域比较的快速滤波算法,该滤波算法共有8个模板如图2所示,对于每个模板的中心点p(图2黑色小块)分别比较其相邻两点p-1,p+1(白色小块)的灰度值大小,仅当p同时小于p-1与p+1时,对p进行滤波操作,即取p点灰度值为p-1与p+1求和的一半。该滤波算法对于乘性散斑噪声较为敏感,避免了对所有像素点进行滤波,较好的保持了原图像的细节信息,使原图像更加平滑,断裂的光迹连续。

图2 邻域比较快速滤波算法模板
鉴于光迹与背景区分明显,依据先验阈值t,可以直接分割出光迹信息。传统的基于灰度直方图投影确定分割阈值的方法和基于类间方差最大化的自适应阈值等方法,获取阈值时间较长,难以满足实时处理要求。经过二值化后图像如图3所示。

图3 预处理后的二值图像
二值化后的激光图像是一系列散点,各点之间不相关,接下来通过改进的连通区生成算法,将散点连接成若干相关的连通光迹块,并标记相应光迹块。本文所采用的连通区生成算法过程如下。
建立两个堆栈S1、S2,一个用于压入像素点,另一个用于弹出像素点。遍历一个区域M中所有点的算法如下:
(1)在图像中找到一个光迹点Pο,作为区域的种子点(x0,y0),将其压入S1,并将其标记为Mo。置S2为空;
(2)交换 S1和 S2;
(3)从S2中逐一弹出压入的点。每弹出一点,立即搜索该点的8邻域中目标点,将其压入 .. ,并将其标记为Mo;
(4)在(3)中,若没有压入任何点,则结束区域搜索;否则,转到(2)。
执行上述算法,可获得该光迹块像素点个数、外接矩形的左上角和右下角坐标等尺度和位置参数。按照一定步长继续搜索未被标记的光迹点,重复以上算法,将得到所有的光迹块。依据获得的尺度和空间分布参数,剔除部分无关的光迹块。
3基于预测与跟踪的光迹快速细化处理
获得光迹块后,就可以针对相应的光迹块进行细化处理。考虑到光迹粗糙,不规则,本文采用基于边缘点法线的中心线定位算法来完成光迹的细化。首先,搜索各光迹块的边缘点作为定位算法的参考点,然后根据各参考点法线方向定位与其对应的中心点,最后连接各中心点,完成光迹的细化。为了加快边缘点的搜索速度避免盲目搜索,提出了基于预测与跟踪的方法进行快速搜索。该方法包括预测和跟踪两个过程。
(1)预测过程:从每一个光迹块的外接矩形左上角开始,以可变步长κ(κ小于矩形的高度)垂直向下预测光迹块外接矩形内的第一个块标记点可能存在的位置,初步将其定位在区间[κ1,κ2]内,然后从区间左端点κ1开始逐点向下搜索直到遇到块标记点停止搜索,将该点作为光迹块边缘起始点Tο并进行跟踪。
(2)跟踪过程:首先判断下一边缘点可能的位置,分别判断Tο邻域的右上点和右下点是否为块标记点;若右上点为块标记点,再判断Tο的正上方相邻点是否为块标记点,若是则该点即为下一边缘点,若不是则Tο的右上点为下一边缘点;若右下点为块标记点,接着判断Tο的右方相邻点是否是标记点,若是则该点为下一边缘点,若不是则右下点为下一边缘点;将跟踪得到的下一边缘点记为Tο,按照上述过程进行跟踪,直到外接矩形右下角停止跟踪。
获得各光迹块的边缘点后,接着进行光迹块中心线的定位操作。算法思路如下:对每一个光迹块边缘点T(i,(x,y)),取与其两侧相相邻k(1<=k<5)点的两个边缘点连成一条直线l ,其中



应用插补策略连接各中点坐标使之成为一条连续细线,该连接的中心线即为细化曲线。对每个光迹块采取上述方法,完成光迹的细化处理。
4实验结果分析
利用文中方法进行实验验证,实验环境为VC++ 6.0,华硕笔记本,4G内存,使用的相机为IMAGINGSOURCE公司的DMK23GM021,激光发射器为650nm *50mW红外线定位灯,采集的图像大小为640×480。对图像分别运用经典的均值滤波算法和不采取滤波处理方式与本文方法进行对比,效果如图4所示。

图4 三种方法对原图像进行处理的对比图
图4中(a)为待处理图像,(b)是没有经过滤波处理,(c)为采用经典均值滤波算法,(d)是本文所用方法,图(b)(c)(d)光迹块外的白色虚线为光迹块的外接矩形,块中的黑色线为光迹的中心线。
对比图4中的(a)、(b),(b)未经过任何滤波算法处理,在搜索光迹块的过程中,因为散斑噪声干扰,光迹断裂致,(b)中左下角部分的光迹被划分成两部分,同时右下角部分较小的断裂块被剔除,表现出的光迹信息不准确且不完整,因此光迹的细化效果较差。对比(a)、(c)可知,均值滤波算法使图像中的光迹过于平滑,没能准确反映(c)中下半部分光迹断裂的形状,弱化了光迹的细节信息,同时最右侧部分的小块光迹被剔除,出现光迹缺失。相比较而言(d)所反映的光迹信息更加完整准确,没有出现(b)和(c)中光迹信息缺失的情况,本文的方法较好的抑制了散斑噪声,保持了原图像应有的细节信息。
工业产品检测对所采用的算法效率要求较高,如果不采取快速有效的处理方法将难以满足实时检测的要求。对于换向器轴孔端面的检测,要求每秒至少采集20幅图像进行分析处理,考虑到图像采集和传输过程也需要耗费一定时间,因此实际图像处理的时间要远小于50ms,通过对100幅光迹图像进行处理分析,得出三种处理方法所需平均时间如表1所示。

表1 三种处理方法所需的平均时间 /ms
由表1可知,在图像预处理阶段如果不进行滤波处理,而直接采用本文提出的基于预测与跟踪的方法,光迹细化的速度小于10 ms,能满足实时检测的要求,验证了基于预测与跟踪方法的快速性。如果在预处理阶段采用经典的均值滤波算法,则检测速度会很慢,无法满足实时性检测,从而说明笔者所提出的滤波算法的快速性。以上实验结果充分验证了笔者所提出方法的准确性和快速性。
5结束语
笔者所提出的基于预测与跟踪的方法能准确快速的实现光迹的细化处理。提出基于邻域比较的快速滤波算法对散斑噪声的抑制效果较好,使断裂的光迹连续,避免滤波后光迹过于平滑,充分表现光迹的细节信息。基于预测与跟踪的方法避免了盲目搜索,加快了光迹边缘点的搜索速度。对于粗糙的光迹,采用边缘点法线的方法,使得光迹中心线定位更加准确。实验结果表明,笔者提出的方法适合复杂激光图像光迹的细化,并且能满足工业实时检测要求。
参考文献:
[1]赵勇.基于激光图像的轮对踏面磨耗动态测量[J]. 激光与红外,2012(07):743-746.
[2]陈向伟,肖冰,高强.基于机器视觉的电容器铝壳端面缺陷检测[J]. 制造技术与机床,2013(12):122-125.
[3]黄桂平,李广云,王保丰,等.单目视觉测量技术研究[J].计量学报,2004,25(4):314-317.
[4]激光三角法在位移测量中的应用[J].光学精密工程,2004,12(z2):104-107.
[5]陈军,杨存建,段英杰,等.一种基于分区标记的快速细化方法[J].计算机应用与软件,2008,25(3):12-15.
[6]李晓峰,徐军,罗积军,等.激光主动成像图像噪声分析与抑制[J].红外与激光工程,2011(02):332-337.
[7]李自勤,王骐,李琦,等.激光成像系统图像散斑抑制算法比较[J].红外与激光工程,2003(02):130-133.
[8]李晓峰,徐军,张胜修,等.激光主动成像图像边缘检测方法[J]. 中国激光,2010(06):1599-1601.
