一种面向三维感知的无线传感控制器的软件设计
2015-12-22 07:26王克权杨宏光苗永康
科技视界 2015年24期
王克权 杨宏光 苗永康 沈 杰 张 腾
(徐州工程学院,江苏 徐州 221111)
0 引言
随着科技的进步,人们的生活慢慢进入科技娱乐化,一些科技含量高的穿戴式设备相继出现。现代控制输入设备都是由多种传感器将信号摄入到设备中,传感器传递的信号使用最多的是光电信号或者传感器信号。在体感输入设备中,大多数的都划分为基于摄像头图像的或者是基于传感器技术的。无线传感技术在网络中的作用,一般是进行二维空间定位,而在三维空间方面技术也在逐渐成熟,相较于二维空间技术其数据量和复杂程度更高,同时信息量也比更大。所以当前技术难点是要制造出高性能、低成本、高强度、高稳定性的三维立体控制器。
根据已有的运动识别算法加上微处理器,合理运用无线设备,设计了一种三维立体控制器。本三维立体控制器选用飞思卡尔的KL25Z芯片作为整机的控制单元,设计了底层硬件控制模块,实现主控单元与MEMS 传感器数据沟通传输。在PC 机上制定一套数据处理与上位机测试软件,并且制定与下位机之间的通讯协议。使用C# 语言在上位机PC 软件中可以实现3D 基本实物模拟,并且与实物进行互动模拟。
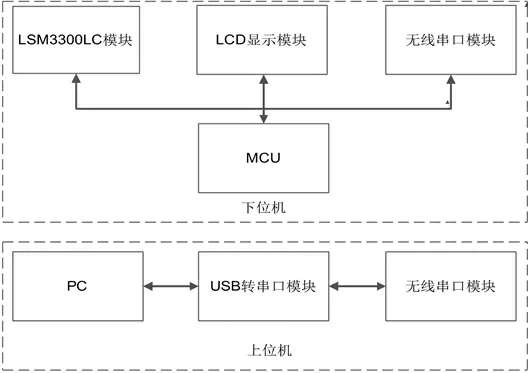
图1 系统结构框图
下位机软件设计:
下位机软件完成下位机微处理器的编程。编译器可以选择KEIL4、IAR 或者CW MCU v10.5。其主要完成的功能有:液晶驱动界面或者显示数据;实现LSM330DLC 的数据功能驱动;TSI(电容触摸技术)的使用;使用QMX 操作系统等。
1 下位机初始化流程
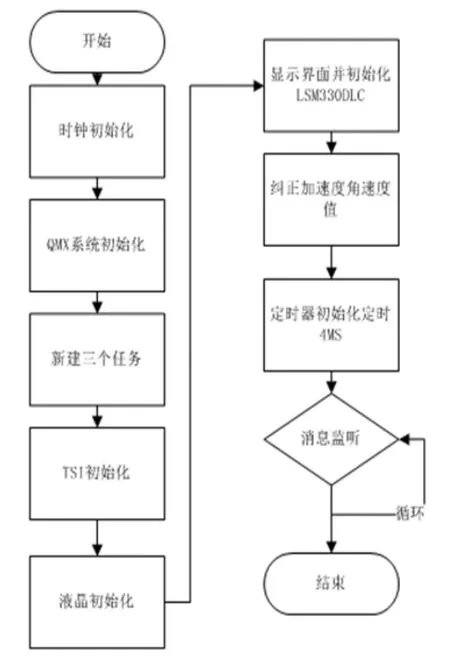
图2 初始化流程图
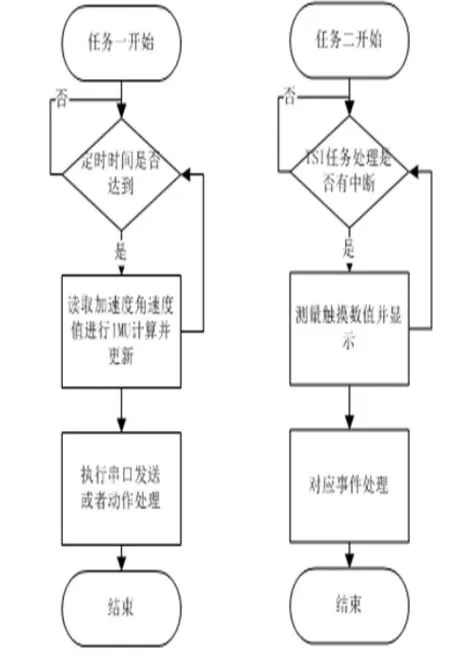
图3 任务一、二流程图
开始上电后,下位机首先配置运行时钟,时钟运行为48M。然后初始化系统栈,数据等系统参数。新建三个系统任务。在任务中初始化TSI 模块,液晶显示模块,传感器LSM330DLC 模块。初始化加速度和角速度初始值。初始化定时器模块。进入任务处理循环中,监听所有消息信号,并处理。
2 下位机消息和数据处理流程
在任务循环中,系统需要处理,串口接收指令事件、发送事件,传感器点击事件,TSI 触摸事件,IMU 姿态定时更新处理事件,和图像显示事件。
任务一:
读取传感器数值,在每4ms 执行一次IMU 姿态解算,得到解算角度。将数据通过串口发送给上位机。
任务二:
实时监测触摸按键任务,对触摸按键事件进行监听并处理。
上位机软件设计
上位机软件采用C# 编译器。主要完成的任务有:串口消息的初始化,接收和处理。数据的图标实时显示和三维控件的显示,摄像头的采集数据处理。
软件界面如下图:
上位机软件采用C#编译器。主要完成的任务有:串口消息的初始化,接收和处理。数据的图标实时显示和三维控件的显示,摄像头的采集数据处理。
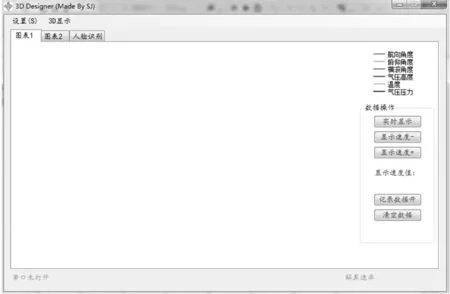
图4 主控界面
此界面上空白部分是用来显示数据实时图表,可以用来观察下位机的数据参数。按键“实时显示”则是开启显示的开关。显示速度可以通过“显示速度-”和“显示速度+”来调节刷新数据的快和慢。“记录数据开”按键是是否将数据记录到缓存中,用来区别刷新显示和3D 控件演示使用。“清除数据”是清空数据缓存中的数据,重新开始记录以后的数据。

图5 3D 运行界面
3D 窗口左上方几个标签是数据实时显示。空白部分是软件执行界面。执行时,在屏幕中心空白处有一个模拟的3D空间显示。运行图如图5。
3 结论
经过软硬件运用调试,本设计基本实现了3D 显示和三维立体控制。实现了将无线传感控制器的运动信号转化为通用的几或更多个控制命令,可以制成通用控制器,应用到三维鼠标等产品上。
[1]李全江.LabVIEW 虚拟仪器数据采集与传统通信测控应用实战[M].北京:人民邮电出版社,2010:100-134.
[2]吴帅.基于三维感知的无线多媒体传感器网络覆盖增强机制研究[D].南京邮电大学,2012:11-15.
[3]Lyshevski SE.Nano-and microelectromechanical systems:fundamentals of nanoand microengineering.[M]Boca Raton:CRC Press,2001:12-58.
[4]袁刚.六维加速度传感器的原理、系统及特性研究[D].重庆大学:2010:11-28.
猜你喜欢
科技与创新(2018年1期)2018-12-23
车迷(2018年12期)2018-07-26
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
铁道通信信号(2016年12期)2016-06-01
现代工业经济和信息化(2016年2期)2016-05-17
测绘科学与工程(2016年5期)2016-04-17
电子器件(2015年5期)2015-12-29
学习月刊(2015年3期)2015-07-09
空间控制技术与应用(2015年2期)2015-06-05