
食堂餐具回收装置的研究
2015-12-20 06:28邹光明张心锋武汉科技大学机械自动化学院湖北武汉430081
食品与机械 2015年5期
肖 兵 邹光明 张心锋 杨 杏 曹 康(武汉科技大学机械自动化学院,湖北 武汉 430081)
中国餐饮行业企业数量巨大[1],餐厅、学校、企业内部食堂的餐具分类及剩余饭菜清理工作主要依靠人工进行,劳动强度大、效率低,尤其在就餐高峰期,餐具大量堆积,剩菜剩饭无法及时清理,影响就餐环境。目前,市场上缺少餐具自动分类回收设备,国外的餐具自动回收清洗技术较为先进,自动化水平较高,其自动化流水线机械设备可实现餐具除渣、分拣、消毒甚至包装等功能,值得借鉴,但是成本也很高,同时由于中外餐厅的差异,如非个性化定制,国外设备并不能完全适应中国餐厅。鉴于此,设计一种食堂餐具回收装置,实现对食堂里不同型号的不锈钢餐具的自动回收、清理和分类工作,以期改善餐饮环境,提高用餐场所的个性化、自动化,获得用餐人员的心理认同,提高食堂管理的经济性[2]。
1 装置整体结构及工作原理
本餐具回收装置由机械系统和控制系统组成。其中,机械系统包括餐具输送机、旋转电磁式机械臂和处理机三部分;控制系统包括主控模块、电机驱动模块和状态信息反馈模块。装置整体三维模型见图1。其工作原理为:餐具输送机对餐具起收集作用,用以接收用餐人员使用过的带有残留物的不锈钢餐具2,并将其传送至旋转电磁式机械臂3;该机械臂带有采用单片机控制的电磁吸盘,通过红外线反射探测传感器采集信息,从餐具输送机一端自动接收餐具,接着将其中的残留物倒入泔水桶6,然后将餐具送至处理机4;处理机工作面安装有采用电机驱动的十字拨叉,工作时十字拨叉旋转,并拨动餐具在工作面作圆周滑行。由于处理机工作面在沿餐具滑行的圆周上设有不同大小的圆孔,且孔径依次增大,所以当餐具滑至与之相匹配的圆孔处时,便从中落下,最终进入相应的餐具回收筐中。这样,就实现了对不同型号餐具的自动分类回收。
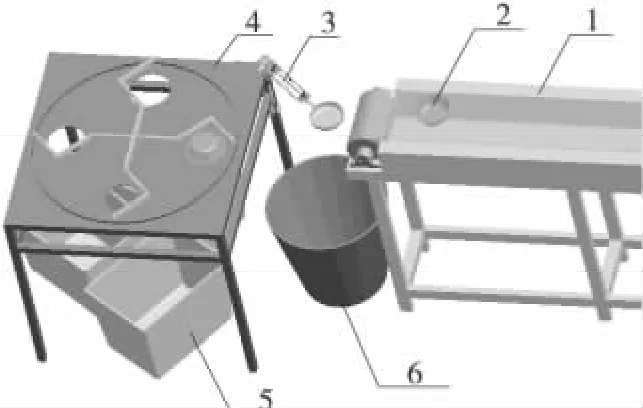
图1 餐具回收装置整体三维模型Figure 1 Overall 3D-model of the dishware recovery device
2 机械系统的设计
2.1 餐具输送机
餐具输送机由机架、输送带、滚筒和驱动电机等组成。环形输送带由前后两根滚筒支撑,可调速驱动电机将运动输送至前滚筒,从而带动输送带连续向前输送餐具。餐具输送机工作示意图见图2。餐具放在输送机上,输送带将餐具输送至输送机的端部时被红外线反射探测传感器检测到,通过控制系统,旋转电磁式机械臂处于就绪状态,餐具被旋转电磁式机械臂接收,然后进入下一处理环节。为保证机械臂依次接收餐具而不至于遗漏,输送带上设有若干工作位,使用时每个餐具都需放在工作位中。
根据人机工程学,设计的餐具输送机长度为1 500mm,高度为750mm;试验所用餐具最大外径为200mm,输送带带宽应比其略大;旋转电磁式机械臂在工作中急转急停提高了工作效率,但由于惯性又有时间延迟,进而制约了工作效率。因而,输送带速度不宜过慢或过快,可定在0.25m/s(15m/min)左右[3],使用中根据需要进行调节。餐具输送机的主要参数见表1。

表1 餐具输送机主要参数Table 1 Main parameters of the dishware conveyor
2.2 旋转电磁式机械臂

图3 旋转电磁式机械臂机构简图Figure 3 Sketch of the rotating electromagnetic manipulator mechanism
2.2.1 工作原理 旋转电磁式机械臂机构简图见图3,其组件主要包括机架、电机、联轴器、立轴、横轴、横轴底板和托盘。托盘内装有电磁铁,并通过单片机控制,可实现对不锈钢餐具的抓取和释放,操作迅速可靠。旋转电磁式机械臂工作原理为:初始状态下,托盘停留在餐具输送机端部。如前所述,当餐具即将到达餐具输送机端部时,传感器采集到信号并将其反馈至单片机,机械臂转为就绪状态,即电磁铁通电。餐具从餐具输送机端部滑入托盘后被电磁铁吸住,受电机驱动横轴顺时针旋转180°,餐具变为碗口朝下,其中的残留物落入下方的泔水桶中。短暂悬停后,立轴顺时针旋转,将餐具从泔水桶上方移至处理机工作位置上方。然后电磁铁失电,餐具被释放,立轴再逆时针旋转至初始位置。与此同时,横轴逆时针旋转180°使托盘复位。就这样,机械臂便完成一个工作周期。
为保证横轴和立轴能旋转确定角度并准确复位,在两轴附近也都安装红外线反射探测传感器,来检测轴是否转动到特定位置。采用这种方法的优点是,控制简便且无累积误差[4]。
2.2.2 强度校核 立轴、横轴和横轴底板为机械臂的核心部分,其中立轴、横轴材料为45钢,横轴底板材料为铝合金。立轴与横轴底板刚性连接,属于悬臂梁,横轴也属于悬臂梁,它们均受弯扭载荷[5]。由于横轴主要承受托盘和餐具引起的载荷,而立轴要承受横轴底板上所有部件的重量,所以主要对立轴进行强度校核。又由于机械臂在工作过程中产生的弯曲和扭转变形对其工作性能影响不大,故不需进行轴的刚度校核。
机械臂强度校核见图4,其中M1=M2=5 440N·mm,M3=767.168N·mm,T=2 000N·mm。B点为螺纹部分,尺寸M12,也是轴上直径最小的部分,再根据弯矩图和扭矩图,易知B点为危险截面,且危险截面直径d=10.2mm。
轴的弯扭合成强度条件为:

式中:
σca——轴的计算应力,MPa;
M——轴所受的弯矩,N·mm,取M=5 440N·mm;
α——折合系数,立轴受对称循环变应力,取α=1;
T——轴所受的扭矩,N·mm,取T=2 000N·mm;
W——轴的弯曲截面系数,mm3,取W=104.18mm3;
[σ-1]——轴的许用应力,MPa。
根据文献[6]得45钢[σ-1]=60MPa,可得:

故立轴满足强度条件。
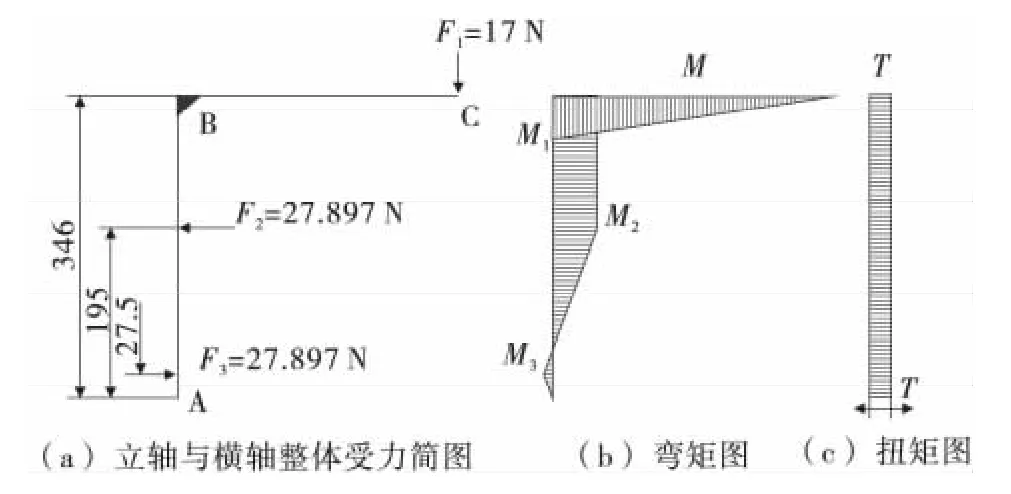
图4 机械臂强度校核简图Figure 4 Sketch of the strength about the manipulator
2.3 处理机
现将3种不同型号的餐具(外径分别为150,170,190mm的201不锈钢碗)分别称为小号碗、中号碗和大号碗。为将其区分开来,使处理机能进行连续作业,处理机主体结构设计见图5。

图5 处理机工作示意图Figure 5 Working schematic of the processor
处理机工作原理为:处理机工作面为圆形,一共有A、B、C、D 4个工位,其中A工位用于承接机械臂释放的碗,B、C、D 3个工位为3个不同大小的工作孔,孔径依次增大,分别为160,180,200mm,依次与小号碗、中号碗和大号碗对应,且比相应碗的外径稍大。工作过程中,十字拨叉顺时针旋转,拨动A工位处的碗在工作面作圆周滑行。此时,小号碗经过B工位,即从小号孔落下;而中号碗在经过小号孔时由于自身直径比孔径大,所以不会落下而继续向前滑动,直到滑动至C工位从中号孔落下;同理,大号碗最终在D工位的大号孔落下。B、C、D孔下方均放有餐具回收筐,不同大小的碗从相应的工作孔落下,再通过螺杆机构缓缓送入对应筐中,即实现对不同型号的餐具的分类回收。
通过以上对餐具回收装置的详细设计,其机械结构和强度满足设计要求,最终根据设计,加工制作了餐具回收装置实验样机,见图6。
3 控制系统设计
餐具回收装置主要采用局部智能控制方式。控制系统主要包括主控模块、驱动模块和状态信息反馈模块,其结构框图见图7。餐具输送机采用220V电源供电,控制系统采用5V电源供电。

图6 餐具回收装置实验样机Figure 6 Physical prototype of the dishware recovery
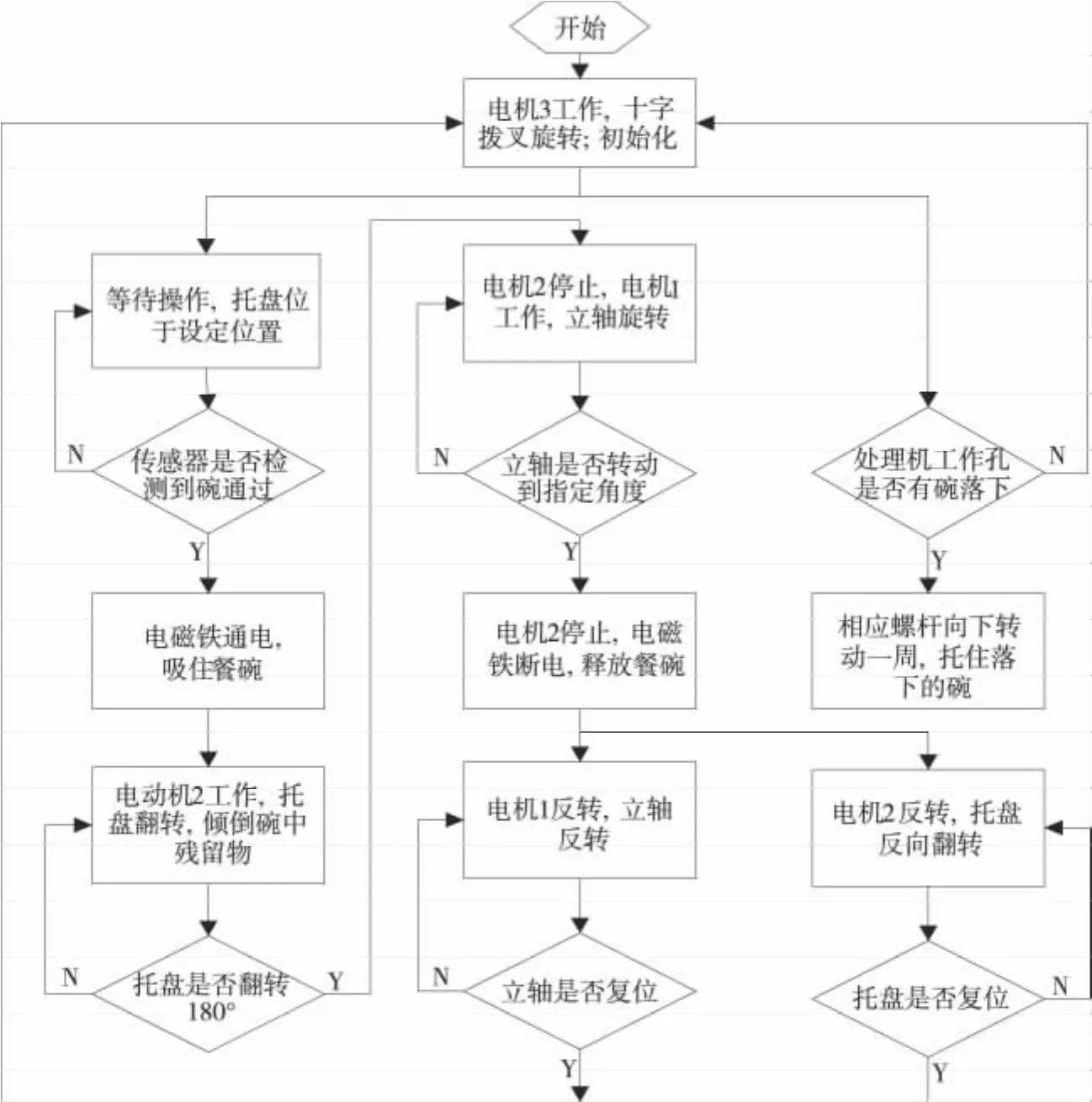
图7 控制系统结构框图Figure 7 Block diagram of the system control
3.1 主控模块
主控模块即主控制器模块,本系统采用AT89C52单片机,最小系统原理图见图8,包括程序下载接口、复位电路以及时钟电路等[7]。转置主控模块主要负责控制旋转电磁式机械臂的动作,当餐具到达餐具输送机端部时机械臂处于就绪状态,当机械臂接收餐具后开始动作(倾倒残留物,旋转至处理机释放后再复位)。
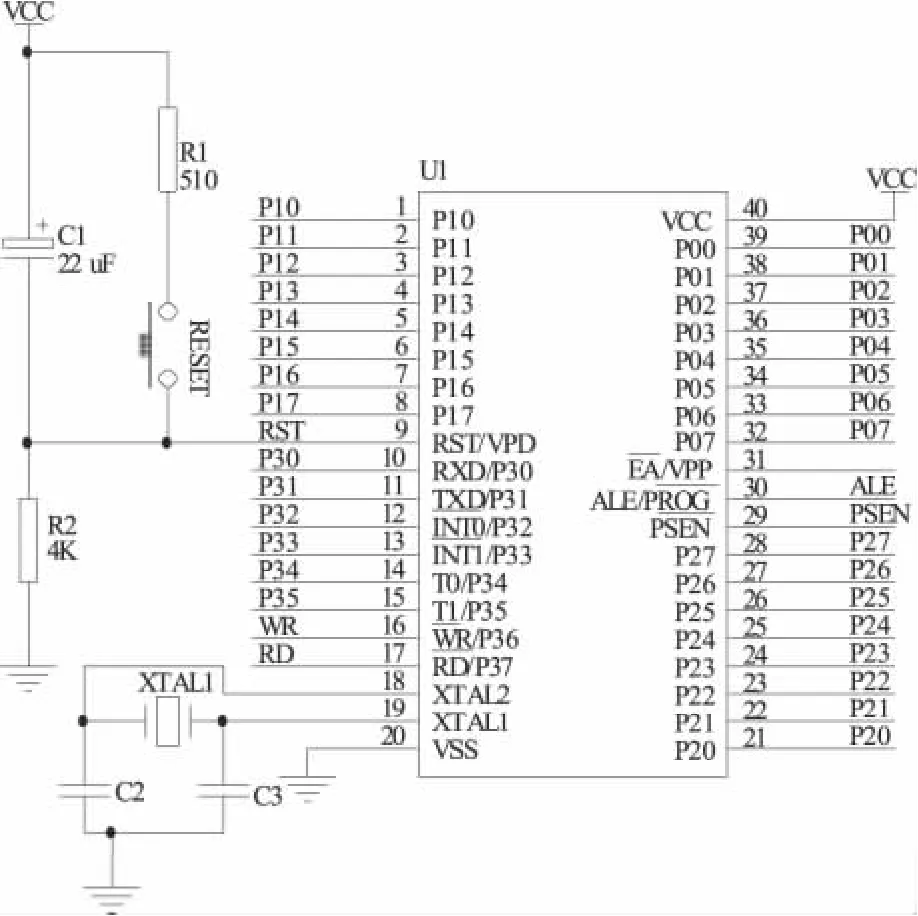
图8 AT89C52单片机最小系统原理图Figure 8 Minimum system schematic of AT89C52SCM
3.2 电机驱动模块
电机驱动模块采用双H桥驱动模块,使用L298N芯片,可控制两路直流电机正反转,分别用于驱动转臂的立轴和横轴的正反向转动,从而完成倾倒、传送及复位动作。
3.3 状态信息反馈模块
该模块采用红外线反射探测传感器,传感器的发射管发射出一定频率的红外线,当检测方向遇到障碍物时,红外线反射回来被接收管接收,经过比较器电路处理之后,绿色指示灯会亮起,同时信号输出接口输出数字信号,有效距离范围2~30cm,实际检测距离可通过电位器旋钮调节,工作电压为3.3~5.0V。该传感器的探测距离可以通过电位器调节,具有干扰小、便于装配、使用方便等特点。
该模块共采用6个红外线反射探测传感器。其中有1个传感器安装于餐具输送机上,检测餐具输送机端部是否有碗通过,并将信息反馈给主控器,从而控制电磁铁是否通电;2个传感器分别安装于横轴和立轴附近,检测轴的转动角度,并将信息反馈给主控器,以实现轴转动确定角度并能准确复位;3个传感器安装于处理机工作孔下方,检测是否有碗落下,并将信息反馈给主控器,从而控制螺杆的转动。
4 结论
设计并制造了一种食堂餐具回收装置,并对其机械系统和控制系统做了详细说明。该装置处理性能分析及测试结果表明,装置具有良好的运行性和可靠性,可对外径为150,170,190mm的不锈钢食堂用汤碗进行自动回收、清理和分类,且装置外形紧凑,移动布置方便,适合大、中、小各类型食堂使用,对食堂餐具自动回收的发展具有一定的意义。
1 张锋学.中国食品安全监管体系改革的法律思考[J].食品与机械,2013,29(2):255~257.
2 宗志,穆成攀.论餐饮桌的调研与改进[J].现代科技,2009,8(7):97~120.
3 何庆,李秀莲,吴子鹤.餐具输送机设计[J].江苏技术师范学院学报,2013,19(4):46~49.
4 Li Yan-biao,Jin Zhen-lin,Ji Shi-ming.Design of a novel 3-DOF hybrid mechanical arm[J].Sci.China,Ser.E,2009,52(12):3 592~3 600.
5 刘鸿文.材料力学[M].第5版.北京:高等教育出版社,2011.
6 濮良贵,纪名刚.机械设计[M].第8版.北京:高等教育出版社,2006.
7 Liu Ya-li,Jing Lan.Application of single-chip computer[J].IMP & HIRFL Annual Report,2004,33(3):50~51.
猜你喜欢
——辽宁省博物馆藏中国古代立轴山水画展
中华书画家(2022年4期)2022-04-21
艺术生活-福州大学厦门工艺美术学院学报(2021年1期)2021-07-21
河北农机(2020年10期)2020-12-14
广东第二师范学院学报(2020年3期)2020-06-28
天津诗人(2018年4期)2018-12-12
传感器与微系统(2018年7期)2018-08-29
优雅(2018年2期)2018-01-30
电子制作(2016年1期)2016-11-07
文体用品与科技(2016年7期)2016-06-15
电测与仪表(2016年8期)2016-04-15
