
基于状态机模型的无线式双闸门监控系统设计
2015-12-20 06:47王卓君杨群丰沙鑫美范凯
电网与清洁能源 2015年10期
王卓君,杨群丰,沙鑫美,范凯
(1. 三江学院 机械工程学院,江苏 南京 210012;2. 中国高速传动设备集团有限公司,江苏 南京 2111000)
我国水资源丰富,但大部分地区也长期饱受水资源泛滥或短缺的危害,水库在调节水资源配置中发挥着重要作用,闸门控制作为水库调节的关键环节,也越来越受到广泛关注,并进行深入研究[1-2]。传统的水库闸门控制主要以人工方式为主,长期值守监管耗费了大量的人力、财力。近年来,随着计算机信息技术的快速普及和工业自动化技术的迅猛发展,现代化的闸门控制系统正逐渐出现在各种闸门控制中,信息化、自动化程度较传统的人工控制方式都有显著提高[3-7],文献[8]运用单片机设计了水电站的闸门控制系统,能够实现对闸门控制机构运行状态的可靠监控;文献[9]运用PLC对闸门进行监控,并通过WinCC组态软件构造了闸门监控系统的通讯网络。
为提升中小型水库闸门监控的现代化水平,确保监控可靠安全,本文对双闸门的中小型水库自动化监控系统进行开展研究,综合采用嵌入式、射频通信及自动控制技术对监控系统硬件平台进行设计,并运用有限状态机模型对远程监控的软件平台进行算法设计,对设计的监控平台进行了性能测试,构建了快速稳定的闸门监控系统。
1 系统方案
本文采用嵌入式及无线通信技术,设计了1套无线排涝站闸门控制系统,系统结构由下位机、下位机和执行机构3部分组成,如图1所示。
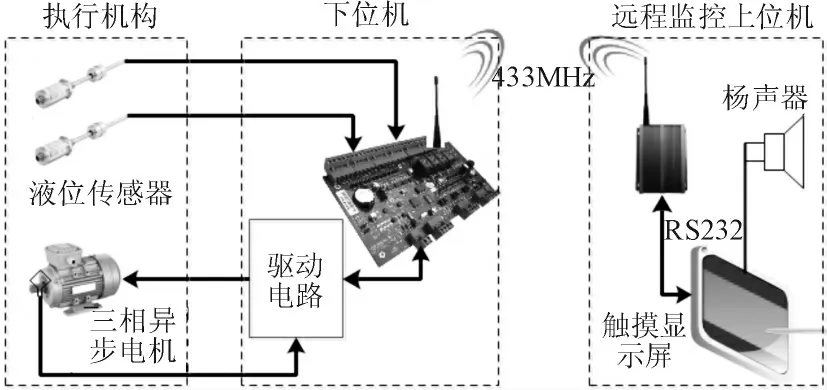
图1 闸门控制系统结构图Fig. 1 Sluice gate's control system structure
1)远程监控上位机。由工业触摸显示屏、无线接收模块和报警器组成,触摸屏提供人机接口,实时显示接收到的水位高度和闸门状态并存储,管理员还可根据应用场合的不同自行设定报警水位等参数;当启动自动运行时,若水位超出或低于设定的警戒水位,扬声器报警提醒,同时软件程序对水位信息进行分析处理,形成控制策略,并用无线的方式向下位机下达闸门控制指令。
2)下位机。自行设计控制电路和电机驱动电路,借助液位传感器检测闸门2侧水位高度,并对当前闸门状态(开/关)进行判断,经无线射频将检测信息发送给远程监控上位机。
3)执行机构。执行机构主要由液位传感器和三相异步电机组成,分别用于液位测量和闸门开关。下位机正确解析指令后经强电隔离电路驱动电机控制闸门的开启或关闭。
2 硬件设计
下位机以某公司针对IEEE802.15.4和ZigBee标准设计生产的CC2430-F128芯片为核心进行设计,CC2430-F128是一款片上系统芯片(SOC),该芯片集成了2.4 GHz ISM频段,发射功率可调的射频模块,具备128 KB可编程闪存和8 kB的SRAM,其中4 kB具备掉电数据保存功能,且具有资源丰富的USART、IO等硬件资源[10-11]。文中选用一对收发模块进行点对点通信,实现双向信息交互。
2.1 液位传感器
执行机构采用投入式液位传感器CYH3016进行水位高度检测,参数见表1。

表1 CYH3016参数Tab. 1 CYH3016 parameter
2.2 驱动电路
驱动闸门的三相异步电机工作在AC380 V电压等级,为保证控制安全可靠,采用光耦设计了5路光电隔离驱动电路,对控制信号进行放大,控制电机正向与反向运转。一路继电器KA1由P1.0控制,另一路由P1.1控制,分别用于驱动控制三相异步电机的正转与反转交流接触器,从而控制闸门的开启与关闭。电机控制的逻辑电路如图2所示。

图2 电机控制电路Fig. 2 Motor control circuit
KA1导通时,交流接触器KM1线圈2端加AC220 V电压,从而闭合电机正转触电,控制闸门开启;同样,KA2导通时,KM2触点闭合,并由互锁使电机由正转变为反转运行,控制闸门关闭。图2中,SQ1和SQ2分别为闸门的正向最大行程开关和反向最大行程限位。
3 软件设计
根据系统方案及设计的硬件平台分别对水位高度监测、无线通信及电机控制和上位机监控平台进行软件设计。通过上位机人机界面设置上下游水位安全高度、预警高度和警戒高度,系统开启后,无线发送端向下位机无线发送运行指令;下位机解析指令后判断是否是手动控制指令,如果不是,即进行周期性水位高度采集,并以无线方式实时传送给监控平台,监控平台根据设定的水位参数对采集的上下游水位高度进行相应的算法处理,形成闸门控制指令;控制指令再经无线的方式发送给下位机,经解析后自动进行闸门控制。
3.1 下位机软件
采用C 语言在IAR for CS51 开发环境下对CC2430下位机进行软件设计。上下游水位传感器采用CC2430内部的12位ADC进行周期性采集,采集后数据打包经无线射频发送给远端监控平台的无线接收端。软件流程如图3所示。

图3 软件流程图Fig. 3 Software flowchart
为规范通信协议,对数据格式及控制命令进行通信格式规范设计,如图4所示。
通信规范分为运行指令、水位数据指令和闸门控制指令3种,控制字分别为R、H和C,命令传输完成后,通过识别S(起始位)字节后一字节的控制字,来确定当前传输的命令类型,然后进行相应的命令解析与处理。
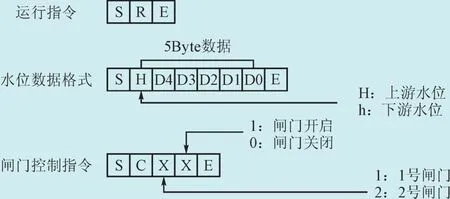
图4 指令协议Fig. 4 Command protocol
3.2 监控软件
监控软件以WQT 10.4吋串口触摸屏为平台,在Realview MDK开发环境下进行设计,主要功能包括:实时水位监测、自动调控设置和手动闸门控制等。作为监控后端和人机交互的窗口,监控平台采用RS232串口与CC2430射频模块通信,用于接收水位高度数据和发送运行命令及调控命令,系统设计中默认手动控制级别高于自动监控级别,即在自动监控运行中,也可以通过人工调控按钮控制闸门的开启与关闭,保证可靠的水位监控。
为适应不同的水库需求,保证危险水情时快速缓解危情,监控平台提供了警戒水位、预警水位和安全水位设定的接口,通过对实时水位情况检测,利用有限状态机模型(FSM)[12-13]进行闸门控制的软件设计,设计的监控状态机模型如图5所示。

图5 状态机模型Fig. 5 State machine model
如图5所示,将控制状态分为单个闸门开启、2个闸门开启和闸门关闭3个状态,“闸门关闭”——2个闸门电机均位于反向最大行程位置(闸门关闭位),处于停机态;“单个闸门开启”——其中1个闸门电机处于正向开启状态,直至达到正向最大行程(闸门开启位)停机,收到关闭命令时,反向关闭闸门,直至达到反向最大行程时停机;“2个闸门开启”——2个闸门电机均处于正向开启状态,直至达到正向最大行程停机,收到关闭命令时,反向关闭闸门,直至达到反向最大行程时停机。通过周期性的对水位进行实时检测,判断是否达到跳转条件,如图5所示,以预警水位的上下2 m作为跳转条件判据,实现3个状态间的跳转切换,该判据可根据应用场合的不同来进行设定。由于闸门开启或关闭均有一定的时间过程,因而状态跳转指令判断条件与设定水位有0.2 m缓冲空间。
程序设计中设定状态检测周期为2 s,即每2 s钟下位机会对当前水位检测1次,并参照设定的预警水位高度判定当前水位在状态机模型中所处的状态,电机提升速度约4 m/min,假设闸门高度为20 m,则完全打开或关闭1扇闸门时间为4 min,则4 min内共对当前水位状态进行了150次状态检测,当闸门提升或降下过程中,若检测到当前所处状态发生变化,则相应的电机立即停机并反转进而降下或提升闸门;若在此过程中,当前所处状态未发生变化,则电机持续运行直至达到正向或反向的行程,电机停机,如此循环。设计的软件平台如图6所示。

图6 监控平台Fig. 6 Monitoring platform
4 试验结论
为保证系统运行可靠稳定,分别对射频通信效果和闸门控制响应效果进行试验测试。
4.1 无线通信丢包率试验
试验以设计的硬件平台为基础,将液位采集器固定于距地面高2 m的空旷位置,每10 s采集一次液位高度并发送给无线接收器;无线接收器分别位于距液位采集器10 m、50 m、100 m、150 m、200 m、250 m、300 m、400 m、500 m的位置进行数据接收,每个位置测试1 min,射频均采用5 db的棒状天线,发射功率设为0 db。由图6可知,每次数据发送为8个Byte,因此每个位置理论应接收6组数据,共48个Byte。测试数据如表2所示。

表2 射频测试数据Tab. 2 Data of RF test
由试验数据可以得出,设计的硬件平台可以实现至少400 m的稳定无线数据传输。
4.2 闸门控制响应试验
采用串口调试助手模拟水位高度与控制平台通信,并接收平台的控制命令,对平台控制的响应速率进行模拟分析。设定水位采集器和数据接收器之间的间距为200 m,其他设置参见4.1节试验,设定上、下游水位设置参数如图8所示,先后进行2次测试,发送与接收测试结果见表3。

表3 测试结果Tab. 3 Test result
根据表3的试验结果分析知,该系统具有很好的响应实时性,能够实现水位的准确监测和对闸门的快速控制,对水情起到很好的控制效果。
综上所述,该无线闸门监控系统能够实现至少400 m的水情无线实时监测,具备良好的人机交互接口,可依据不同的应用场合进行系统配置,具有一定的通用性。同时,该系统能及时实现闸门调控,实时性良好。
[1] 汪卫红,李阳. 基于GSM的水电厂闸门PLC远程监控系统[J]. 电网与清洁能源,2004,20(4):3-25.WANG Weihong,LI Yang. PLC remote monitoring system based on GSM for gate of hydropower station[J]. Power System and Clean Energy,2004,20(4):3-25(in Chinese).
[2] 李丽芬,朱永利. 基于无线传感器网络的绝缘子泄露电流在线监测系统[J].电力系统保护与控制,2011,3(10):74-79.LI Lifeng,ZHU Yongli. Monitoring system of insulator leakage current on line based on wireless sensor network[J].Power System Protection and Control,2011,3(10):74-79(in Chinese).
[3] 王晓辉,熊海军. 基于无线传感器网络的和GPS的电容介损角的在线监测[J]. 华北电力大学学报,2013(3):47-52: 119-123.WAMG Xiaohui. XIONG Haijun. Power capacitor online monitoring system based on wireless sensor network and GPS clock module[J]. Journal of North China Electric Power University,2013(3): 47-52(in Chinese).
[4] 秦理. 基于无线视频识别的电力设备全寿命[J]. 南方电网技术,2014(8):3.QIN Li. The RFTD-Based whole life-cycle management of electric equipments[J]. Southern Power System Technology,2014(8):3(in Chinese).
[5] 张青山,段建东. 基于ZigBee的开关柜触头温度在线监测预警系统[J]. 高压电器,2015,313(4): 29-35.ZHANG Qingshan,DUAN Jiandong. Online temperature monitoring warning system based on ZigBee for switchgear contacts[J]. High Voltage Apparatus,2015,313(4): 29-35(in Chinese).
[6] 姜毅. 水电站分布式闸门开度检测系统的研究[D]. 重庆:重庆大学,2003.
[7] 蒋元广. 水闸自动化监控系统的设计与研究[D]. 南京:河海大学,2002.
[8] 梁晨露. 基于单片机的水电站闸门控制系统设计[D]. 吉林:吉林大学,2011.
[9] 李曼娜. 基于PLC的水电站闸门监控系统的研究[D]. 武汉:武汉理工大学,2012.
[10] Smart CC2430.A True system-on-chip solution for 2.4 GHz IEEE802.15.4/ZigBee[EB/OL]. [2015-04-02]. http://www.chipcon.com.
[11] 姚晓通,王记荣. 牵引供电系统中避雷器在线监测的研究[J]. 电瓷避雷器,2015,138(3): 89-95.YAO Xiaotong,WANG Jirong. Study for on-line monitoring of arrester in traction supply system[J]. Insulators and Arresters,2015,138(3):89-95(in Chinese).
[12] GRIESKAMPW,GUREVICH Y,SCHULTEW,et a1.Generating finite state machines from abstract state machines[J]. Software Engineering Notes,2002,27(4):112-122.
[13] HABIBIA,MOINUDEEN H,TAHARS. Generating finite state machines from system[J]. International Workshop on Abstract State Machines,2005(32):101-109.
猜你喜欢
经济技术协作信息(2020年23期)2020-02-28
科技与创新(2018年1期)2018-12-23
中国卫生(2016年12期)2016-11-23
新高考·高一数学(2016年3期)2016-05-19
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
华东理工大学学报(自然科学版)(2015年1期)2015-11-07
空间控制技术与应用(2015年2期)2015-06-05
中国医药导报(2015年27期)2015-02-28
