
经济型电脑横机三角结构及控制方式的改进分析
2015-12-19 03:37福建红旗股份有限公司郑敏
纺织机械 2015年2期
福建红旗股份有限公司 郑敏/文
近两年经济型电脑横机得到较快的发展,因其价格实惠,仅为全电脑横机的三分之一左右,而功能上也同样可以实现提花、集圈、挑孔、绞花、波纹、明收针和暗收针等,因此得到国内中小企业及东南亚发展中国家企业的青睐。然而,原有经济型电脑横机的三角控制基本采用电磁铁直接控制,存在噪音大,电控不稳定、维修率高等问题,因此,仍存在较大改进空间。
1 原三角部装结构分析
原经济型电脑横机三角部装如图1所示,三角部装正面图。

由图1可看出,三角底板上部分控制织针的走针轨迹,主要由上导针三角、密度三角、桥三角和移圈三角组成;三角底板下部分控制选针片的走针轨迹,主要由下导针三角、编织三角、起针三角和中心三角组成,其中移圈三角、起针三角、编织三角均可单独垂直于三角平面的方向上下活动。
由图1分析:

a.起针三角的作用有起针、吊目和接针,但吊目位高于接针位,因此,接针完成后还会被推起至吊目高度后才被压下,这样增加了纱线的张力,造成纱线和织针的磨损,对密度较紧的组织可能会产生破洞;
b.选针片在工作中除了选针功能外,还直接参与编织、吊目和接圈,即织针需要通过选针片推动进行编织、吊目和集圈,仅有翻针时,由选中的织针单独完成,这样选针片工作频繁,而经济型电脑横机的针床的针槽不是插片式,是整体铣槽,因此针槽的侧面粗糙度较高,选针片靠弯曲一定的弧度与针槽接触,在针槽中容易发生磨损,弧度减小,而掉下针槽造成漏选、撞针等严重故障。
由于以上存在的缺点,造成编织时速度不能太快,编织密度不能太紧,经常要检查选针片松紧程度,及时更换选针片,以免损坏机器或编织错误。
三角控制方式见图2三角部装反面图,为使图形简洁清晰,与本文讨论无关的零部件均拆除。图2中可看出有4个磁保持电磁铁分别控制4个可活动的三角,当电磁铁通电时,铁芯被吸下并推动三角芯轴,使三角退出三角底板表面形成走针道;当电磁铁断电,铁芯则失去磁保持力处于放松状态,在压簧的作用下,三角缩起与三角底板平面平齐,即退出工作。
这种控制虽然简单直接,但电磁铁吸下时瞬间冲击力大,噪音较大,并且三角芯轴与三角座的配合间隙太大或太小都会造成卡阻,每个电磁铁的高低位置需要人工仔细调整,维修率较高。

2 三角走针道的改进
为提高编织速度和稳定性,减少选针片的磨损,考虑将编织三角移到三角底板上部,位于移圈三角下方,均可活动。编织时移圈三角下降;移圈时,移圈和编织均凸出。三角底板的下部由于吊目和接针有干涉,所以考虑将这个三角分别拆为起针三角和接针三角,各自可以活动,并且在接针三角最高位对应的位置,将起针三角铣一斜面,使接完线圈的织针可以顺利通过起针三角。
改进后的三角结构及走针轨迹见图3,改进后的走针方式更加合理,减少了选针片磨损,提高了织针编织的稳定性。
3 三角控制机构改进
3.1 初步方案的确定
由于将吊目三角和接针三角分开,就增加了两个活动三角,三角动作组合增加,电磁铁越多越不利于装配调整和维修,使机械故障增多,再有接口增多、线路及控制程序复杂,且电磁铁吸放瞬间产生较强电磁脉冲和电源波动,干扰电控稳定性。
而目前在电脑横机行业自动化控制方面,步进电机等应用已经很成熟,步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件,其特点是:在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响;可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
从步进电机的特点可以总结出使用步进电机的好处:一,过载性好。其转速不受负载大小的影响,所以步进电机使用在对速度和位置都有严格要求的场合,适合三角控制的要求;二,控制方便。步进电机是以步为单位旋转的,数字特征比较明显,这样就给计算机控制带来了很大的方便,便于三角控制程序计算和编写;三,整机结构简单。传统的机械速度和位置控制结构比较复杂,调整困难,使用步进电机后,使得整机的结构变得简单和紧凑。
鉴于以上原因,初步方案为:三角底板中间位置较空,将步进电机安放在中间,轴由两端伸出,凸轮与电机轴固定联接。上凸轮控制移圈三角和编织三角,下凸轮控制左、右起针三角,左、右接针三角。那么凸轮曲线该怎么绘制,上下凸轮该如何组合实现各种编织功能,还需要将各动作进行分解才能明确。
3.2 凸轮曲线设计
三角的编织状态共有5种:编织、移圈(翻针时要脱去线圈的针的动作)、左接针、右接针(翻针时要接线圈的针的动作,按机头运行方向不同分左右)、吊目。从电控设计方面考虑,电机旋转一周就可以分成5个控制点,相邻两个控制点间,电机转动角度是:360°/5=72°,每个控制点实现一个编织状态,即对应的在每个控制点上,上下凸轮的组合能够使三角有序实现相应的动作,互不干涉。那么我们需要了解每个编织状态下各三角的动作:
编织时:移圈三角提起,其余三角全放;
移圈时:所有三角全放;
左接针时:右起针三角、右接针三角和左起针三角均提起,左接针三角、移圈三角和编织三角放下;
右接针时:左起针三角、左接针三角和右起针三角均提起,右接针三角、移圈三角和编织三角放下;
吊目时:编织三角、移圈三角提起,其余三角均放下。
3.2.1上凸轮曲线确定
由以上动作分析,编织三角在吊目时被提起,移圈三角在编织和吊目时被提起不工作,其余放下工作,因此可知控制编织三角的凸轮曲线可以设一处凸起即可,见图4(a);控制移圈三角的凸轮曲线应有两处凸起,分别在两个控制点起作用,而两处凸起至少应相隔72°,但还要保证低位有足够的过渡,因此将两个凸起相隔两个控制点144°较为合适,见图4(b)。
因两个三角距离较近,可以设一个凸轮分别控制两个三角,因在吊目时两个三角均要提起不工作,将移圈凸轮曲线其中一处凸起与编织凸轮曲线的凸起处于同一位置即可,合并后上凸轮示意图。见图4(c)。

3.2.2下凸轮曲线确定
由三角动作分析,左、右接针三角在左、右接针时各被提起不工作,左、右起针三角则不论左接针还是右接针均被提起不工作。因此可知控制左、右接针三角的凸轮曲线各有一处凸起即可,两凸轮曲线相同,见图5(a),但两个凸轮合并后,应在不同控制点上,可相隔72°或144°,取其一合并后的下凸轮示意图见图5(b),两控制点相隔72°。
3.2.3 联动机构
左、右起针三角位于中轴线外侧,如果单独由凸轮控制,距离远,力矩较大,而且单独被提起不起作用,只有和接针三角同时提起,才能实现接针状态,因此可以将左、右起针三角与接针三角联动。结构示意图见图6。
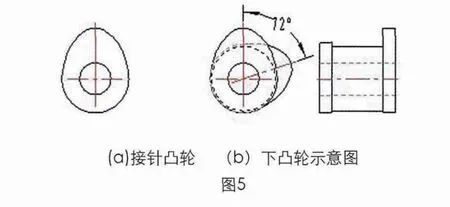
图6中导板通过4个支撑柱固定在三角底板背面,每个三角背面各连接一导杆,各导杆穿过导板,在左、右起针三角导杆的端部各用螺钉安装一联动杆,联动杆一头与起针三角导杆固定联接,另一头靠着接针三角导杆的端面,没有连接。
接针三角与起针三角相邻的边做成台阶形,接针三角提起时可以带动相邻的起针三角一起上提,同时导杆的端面将联动杆顶起,带动另一边与联动杆锁紧的起针三角导杆一起上提,如图6 A-A中所示,三个三角同时抬起实现接针功能。

3.2.4 凸轮的组合
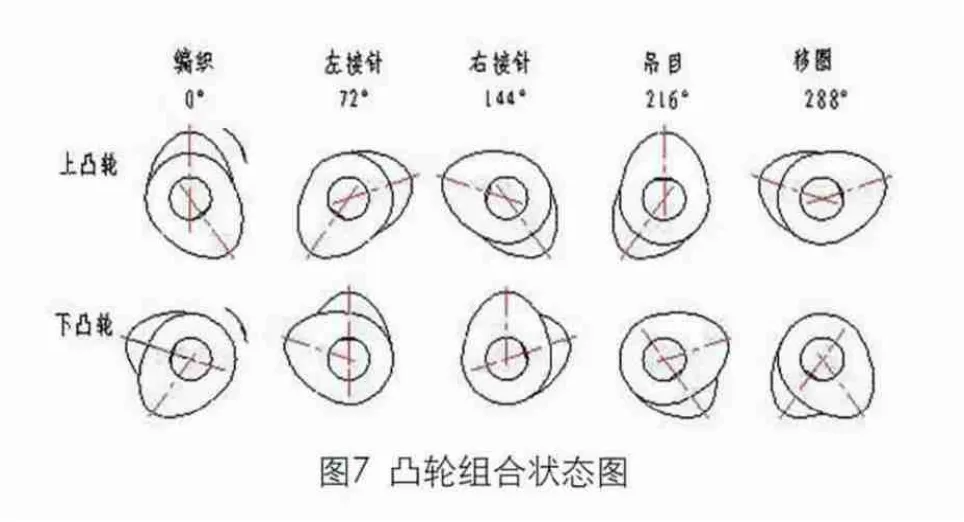
上下凸轮按一定的角度安装后,才可以实现所有动作,图7为凸轮组合安装后,每个动作的凸轮状态图。
图7中,上下凸轮按顺时针方向同步转动,相邻的转动角度为72°,轴承位于凸轮的正上方,即始终处于0°的位置(图中未画出),当编织位为0°时,上凸轮正上方有一个凸起,对应的是移圈三角,也就是移圈三角被提起,对应编织三角的凸轮没有凸起,编织三角放下;同理,下凸轮对应的起针三角和接针三角均被放下,此时形成的是编织的走针道。依此类推,可以实现左接针、右接针、吊目和移圈。
3.3 三角控制总体结构
通过以上各部分的设计,机械上就可以实现五种编织状态。同时为了给电控一个零位信号和五个分度信号,可在电机轴上安装5等分的分度盘,并在其上设定一个零位点,分度和零位的感应可用金属感应、霍尔感应或光耦感应,具体结构与电控设计的配合,选择合适的感应器,图中仅给出分度盘示意图。三角控制的总体结构,如图8所示:

双轴伸步进电机锁在三角底板上,上、下导板通过支撑柱固定在三角底板上,三角背面连接有导杆、导杆通过导板定位和导向,导杆上固定安装有滚轮或轴承,并用压簧使轴承始终靠在凸轮上面。
控制过程是:先使凸轮复位,即保证凸轮处于零位的正确位置上,按照编织程序设定的动作发送一定的脉冲,驱动电机转动相应的角度,再通过分度感应器传达的信号判断转动角度是否正确,若不正确,则停止转动,并发出报警信号;若正确则继续执行下一步骤。这样步进电机可以带动凸轮准确的旋转即定的角度,凸轮将轴承顶起或放下,实现三角的所有编织动作。
4 结语
本文分析了经济型电脑横机的三角结构及控制方式的改进,针对三角走针的缺陷,对三角结构进行优化的设计,减少选针片的磨损,提高了织针编织性能和可靠性;三角控制方式由原来的电磁铁控制改为步进电机和凸轮的组合控制,对三角减少了冲击力和噪音,减少了电磁脉冲的干扰,控制方式简单,易于编程,提高了电控的稳定性和降低维修率,在实际应用中有很大的意义。
猜你喜欢
机械设计与制造工程(2022年1期)2022-02-19
模具制造(2019年10期)2020-01-06
制造技术与机床(2019年8期)2019-09-03
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
华北理工大学学报(自然科学版)(2017年4期)2017-11-29
纺织科学研究(2017年6期)2017-07-03
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
中国纤检(2016年8期)2016-10-22
西安工程大学学报(2016年3期)2016-06-05
