
基于RGB彩色通道的结构化道路车道线检测
2015-12-18 11:40杨智杰
电子科技 2015年1期
杨智杰
(西安电子科技大学物理与光电工程学院,陕西西安 710071)
随着公路设施的完善和个人车辆持有量迅速增加,公路的安全隐患也越来越严重。车载车辆智能辅助系统的研究已成为交通领域的热点[1]。基于机器视觉的系统由于其价格低廉以及蕴含信息丰富,已被广泛应用。其中车道线检测和预警技术则是车辆智能辅助系统的重要组成部分之一[2]。
针对车道检测问题已提出多种不同算法,基本可归纳为两类:一是利用车道线固定明显的颜色特征提取出具有某种特殊颜色的目标,然后通过对车道建模,再根据其特殊的几何特征、尺寸特征、形状特征进行第二次提取最终得到车道线;二是先将原图像转化为灰度图像,进行图像预处理,然后进行边缘检测,再对车道标识线建模,利用 Hough变换检测到车道标识线[3]。通过对这两类算法的研究发现,前一类算法直接对彩色图像进行处理,算法复杂性高、实时性差。而后一类算法对灰度图像处理,在边缘检测时,车道线的特征明显被弱化,使得提取车道线难度加大[4]。
对于第一类算法处理速度慢、实时性差的缺点,本文采用一种特征颜色的边缘检测算法,针对特征颜色RGB分量值的特征,采用设定的转移函数标记特征颜色区域,在确定的车道线主要区域应用数学形态学方法进行边缘检测,从而可剔除大量的无效边缘,检测出车道线。该方法较为简单,且处理速度快。
1 车道线颜色特征提取
1.1 RGB颜色空间模型
针对图像处理,RGB是重要和常见的颜色模型,其建立在笛卡尔坐标系中,以红、绿、蓝3种基本色为基础,进行不同程度的叠加,从而产生丰富而广泛的颜色,即三基色模式[5]。
图1所示,RGB颜色空间以一个单位长度的立方体来表示颜色,黑、蓝、绿、青、红、紫(品红)、黄、白等8种常见颜色分别位于立方体的8个顶点[6]。将黑色置于三维直角坐标系的原点,红、绿、蓝分别在3个坐标轴上,整个立方体在每一象限内。各颜色的取值范围:R是0~255;G是0 ~255;B是0~255,归一化到0~1之间。红绿蓝分量全部组合共可表示2563=16 777 216种不同的颜色。因此,用RGB颜色空间来近似表达自然界中的颜色是可以达到使用要求。

图1 1 RGB颜色空间
1.2 道路图像特征分析
道路图像路面色彩接近于灰色,其RGB分量值具有以下特征

路面上的白色和黄色车道线的RGB分量分别满足下式

根据式(1)~式(3)可知,白色车道线的RGB这3个分量值均较大且接近255,而黄色车道线的R分量和G分量值接近,且远大于B分量值。
1.3 颜色特征提取函数
通过对道路图像的分析,设计标记特征颜色的转移函数如下

其中,D(i,j),red(i,j),green(i,j),blue(i,j)分别代表图像中像素点(i,j)处的转移函数值,R分量值,G分量值,B分量值。如图2(a)是原道路图像,图2(b)是应用特征函数提取出主要车道线区域后的图像。
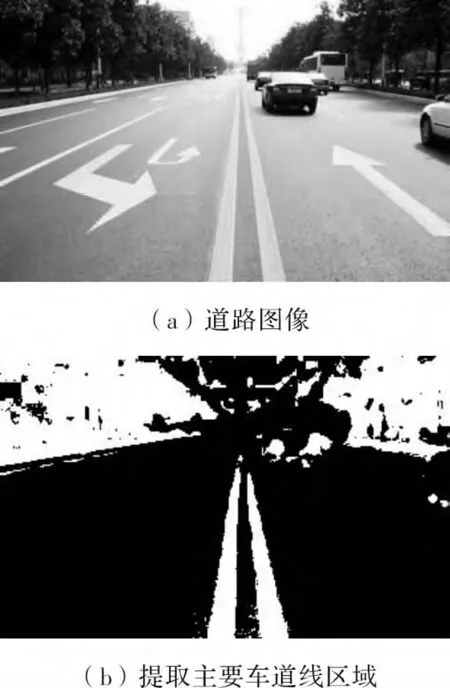
2 特征函数提取主要车道线区域
2 基于数学形态学的边缘检测
2.1 基本形态学方法
对于提取到主要车道线区域的图像,有必要应用边缘检测算法,进一步细化得到车道线。本文采用基于数学形态学的边缘检测方法。
形态学处理方法是一种非线性信号滤波器的实现过程,其是通过变换可局部修改信号的几何特征[7]。在图像处理中,形态学膨胀能使目标像素增多,填补空洞和桥接裂缝;形态学腐蚀可消除目标图像中小点和不必要的连线。将腐蚀与膨胀按不同顺序组合就形成了形态学的开闭运算,开运算是先腐蚀后膨胀,而闭运算是先膨胀后腐蚀。
设f(x,y)和b(x,y)为定义在二维离散空间f和b上的两个离散函数,f(x,y)为输入图像在点(x,y)处的灰度函数,b(x,y)为结构元素在点(x,y)处的灰度函数,Df为 f(x,y)的域,Db为 b(x,y)的域,则基本的形态开、闭滤波器为

式中,f为输入图像;b为结构元素;fob为f被b的形态学开运算;f·b为f被b的形态学闭运算;f⊕b为f被b膨胀;fΘb为f被b腐蚀。
开、闭运算具有各自的滤波效果且不同程度地影响到图像的目标信息,实际一般采用形态开、闭的级联形式,组成形态学组合滤波器。常用的有开闭、闭开滤波器,分别用γ、φ代表开和闭运算

2.2 改进的形态学边缘检测方法
为使形态学滤波器具有较强抗噪声能力,可改进基本的γφ和φγ滤波器,可将γφ和φγ滤波器以任意次序进行串联,构成γφφγ或φγγφ滤波器,其滤波效果优于基本的γφ和φγ滤波器。由于已知,两个开或两个闭的组合对于形态学滤波没有意义,可将上面两个顺序滤波器改为γφγ和φγφ,称为交变顺序滤波器(ASF)[8]。根据开、闭滤波器的对偶性有

则

可知γφγ和φγφ互为对偶滤波器。γφγ和φγφ滤波器去除的噪声点位于不同的坐标处,若将其去除噪声能力结合起来则可达到理想的噪声去除效果,该思想可应用到边缘检测中去,即本文应用的边缘检测方法。
3 实验仿真
3.1 检测方法流程
采用车道线检测方法的主要步骤:(1)对输入彩色图像进行RGB三通道分离。(2)应用式(4)设计的转移函数处理RGB彩色图像,标记出特征颜色区域。(3)对标记出特征颜色区域的图像分别应用式(11)和式(12)的形态学和滤波器处理。(4)对经(3)步处理后的两幅图像分别应用Canny算子进行边缘检测,并对检测后的图像进行膨胀。(5)对经(4)步操作后的两幅图像取交集得到检测图像,并将检测出的车道线标记与原图像中。

图3 检测流程图
应用特征函数标记出主要车道线位置,之后应用γφγ和φγφ滤波器处理。对经γφγ和φγφ处理的图像应用Canny算子检测后得到含有伪边缘的边缘图像,并对该结果边缘先进行膨胀,其目的是扩充边缘范围,便于后续处理,然后将得到的两个边缘求交集,由于检测到的边缘经膨胀后属于宽边缘,所以交运算后不会出现边缘的断裂。对噪声而言,由于两个滤波器具有互补滤波作用,所以噪声的交集几乎为零,既对噪声做了一个强去除,对最终得到的宽边缘可利用形态学边缘细化算法对其细化,得到理想的边缘图像。因此,应用本文方法可较好地检测出车道线。
3.2 仿真结果
实验通过Matlab编程实现,采用含有白色车道线与黄色车道线的公路图像,图像格式为Jpeg,图像大小为900×700。计算机硬件环境:Windows7系统,CPU为 Core i3 -2120,主频3.3 GHz,内存4 GB。
式(4)中,k值的选取取决于黄色车道线的色彩差异,若不是纯黄色,而是偏向红色或绿色,则系数k的值可适当减小。实验时,k取0.1~1.5之间的不同值进行测试,发现取值为0.2或0.3时检测效果最好,因此实验中取k值为0.3。
仿真结果如图4所示,对于未经放缩的原始RGB图像,算法处理每一帧图像的时间约为0.037~0.052 s,处理速度较快,能满足一定的实时性要求。
为验证本文所用方法对不同道路情况的鲁棒性,进行了多组实验,检测如图5所示。
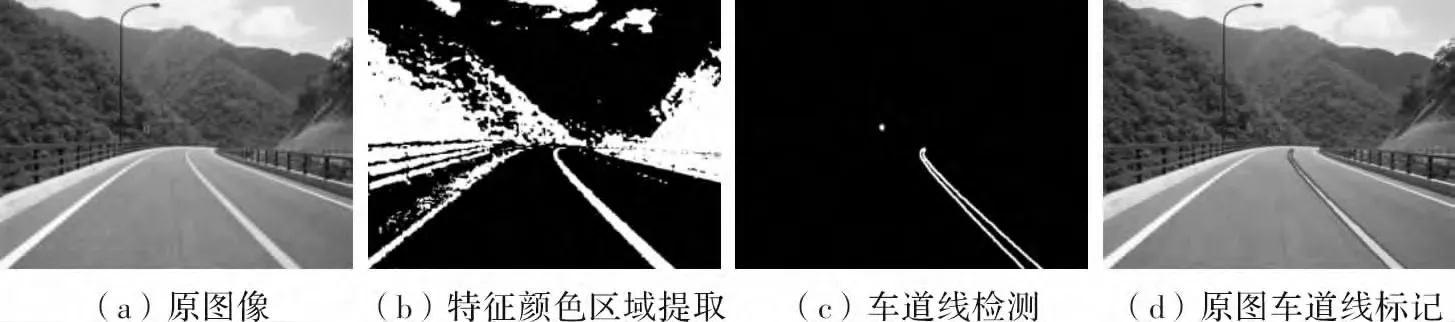
图4 车道线检测结果

图5 不同道路图像检测结果
由实验结果可看出,根据设计的特征颜色转移函数,道路图像中大部分背景基本被消除,而目标区域得到保留,在应用形态学算法对图像处理后能有效地检测出黄色车道线。其算法的原理简单,且对于特定颜色车道线的检测效果良好。
但该算法也存在不足,当背景物体颜色与车道线颜色相近时,在检测出车道线的同时,背景区域也会被标记出来。针对这一不足,正在寻求改进的方法,主要思想是根据人的视觉特点,由图像的底部开始,设定一个梯形的感兴趣区域,只对在感兴趣区域内的车道线进行检测,由此便可剔除道路以外其他背景的干扰。
4 结束语
智能车辆视觉导航系统中,车道线检测是一个重要环节。本文采用基于RGB通道和数学形态学的检测算法,根据道路图像中车道线颜色特征设计转移函数来标记原图像中的车道线区域,应用数学形态学算法对选取的区域进行边缘检测得到检测结果。该算法的原理简单,运算速度快,且在车道线边缘识别上,具有较高的准确度,因此对自动车辆车道线检测有一定的意义。
[1]胡彬,赵春霞.基于概率霍夫变换的快速车道线检测方法[J].微电子学与计算机,2011,28(10):177 -180.
[2]Kong H,Audibert JY,Ponce J.General road detection from a single image[J].IEEE Transactions on Image Processing,2010,19(8):2211 -2220.
[3]刘献如,蔡自兴.结构化道路车道线的鲁棒检测与跟踪[J].光电子·激光,2010(12):1834 -1838.
[4]周磊,任国全,肖浩,等.结构化道路车道线快速检测的一种改进算法[J].计算机仿真,2012,29(4):362 -366.
[5]赵景秀,王菁,赵昭.基于RGB空间剖分的彩色图像边缘检测[J].光电子技术,2009,29(3):171-174.
[6]杨璟,朱雷.基于RGB颜色空间的彩色图像分割方法[J].计算机与现代化,2010(8):147 -149.
[7]雷涛,樊养余,王小鹏,等.基于形态学结构元素建模的车道线检测算法[J].计算机应用,2009,29(2):440 -443.
[8]徐岩,雷涛.基于形态学方法的车道线检测算法研究[J].铁道学报,2009,31(1):107-110.
猜你喜欢
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
中国交通信息化(2020年11期)2021-01-14
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
中国继续医学教育(2015年2期)2016-01-06
中国交通信息化(2015年10期)2015-06-06
振动、测试与诊断(2014年6期)2014-03-01
