
四轴飞行器的动力学建模和位置控制研究
2015-12-18 11:40徐大远王英健陈冠军
电子科技 2015年1期
徐大远,王英健,陈冠军,张 巍
(长沙理工大学电气与信息工程学院,湖南长沙 410214)
随着新材料、微机电(MEMS)、微惯导(MIMU)和飞行控制等技术的进步,微小型四轴飞行器得到了迅速发展[1],目前已成为业界研究关注的热点领域。微小型四旋翼飞行器适合在近地面环境中执行监视、侦察等任务,具有广阔的军事和民用前景[2]。
以四轴为研究对象,建立其准确的动力学模型,运用成熟的控制理论设计飞行控制系统,是四轴研究的关键组成部分。
1 建立四轴动力学模型
四轴的气动力非线性且非定常。此外,气动环境复杂,难以精确建立其数学模型[3]。为简化模型,作如下假设[4]:(1)四轴视为刚体,且完全均匀对称。(2)螺旋桨(桨)固定且不变形。(3)四轴的平动速率和转动快慢,与桨的转速成比例。(4)忽略四轴在飞行过程中,受到的阻力。
建立地理坐标系E(OeXEYEZE)和机体坐标系B(ObXBYBZB),如图1所示。
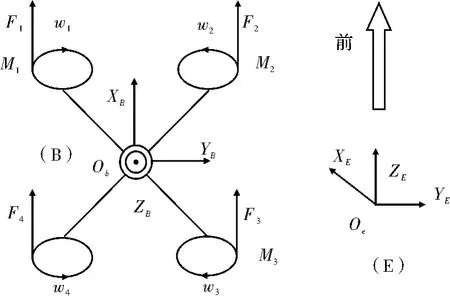
图1 四轴结构模型
从一个坐标系到另一个坐标系的变换可通过依次绕坐标轴不同的3次连续转动来实现,转动的角度称为欧拉角。按照ZYX的欧拉角转动顺序,机体坐标系B到地理参考坐标系E转换的旋转矩阵REB[5]

其中,c表示 cos(*);s表示 sin(*);φ、θ和 Ψ 为四轴绕机体坐标系B各轴ObXB、ObYB、ObZB转动的欧拉角,称作横滚角、俯仰角和偏航角。
四轴所受到的向上升力、反扭力矩与桨转速的平方成正比[6],有

图中,Fi和Mi分别表示4个桨旋转产生的向上升力和反扭力矩;Kf为升力系数;Km为反扭力矩系数;wi为旋转角速度。
四轴在机体坐标系B下所受向上升力FB,分解为在地理坐标系E下力FE
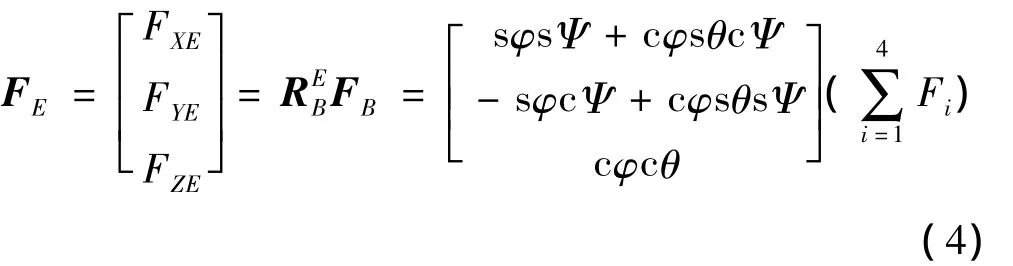
FE为四轴沿地理坐标轴OeXe、OeYE和OeYE平动受到的外力。得四轴平动时的线加速度
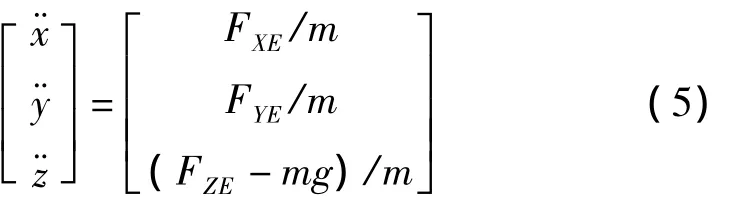
m为四轴总质量,g为当地万有引力常数。
记四轴绕机体坐标轴旋转的转矩为Mφ、Mθ和MΨ
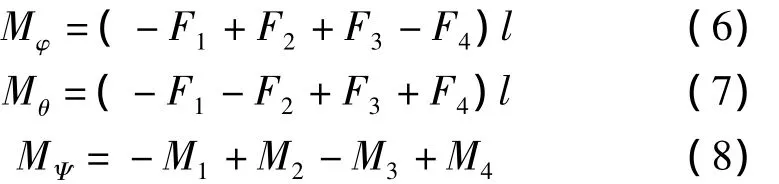
其中,l为四轴质心到电机轴中心的距离。
根据刚体转动时的牛顿—欧拉方程,得四轴绕机体坐标轴转动的角加速度
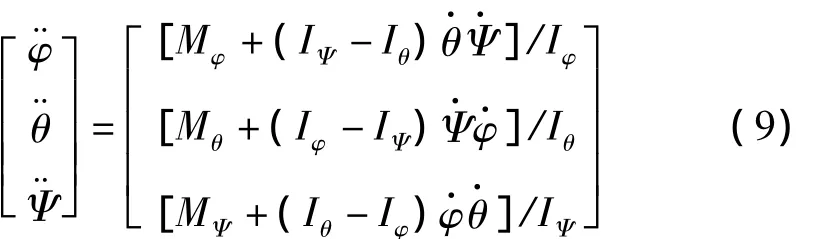
Iφ、Iθ和IΨ为四轴绕机体坐标轴旋转的转动惯量。
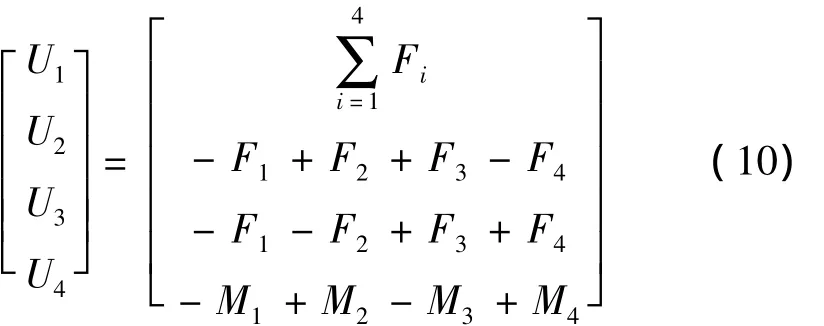
定义u1、u2、u3和u4为四轴的4个系统控制输入量[7],其表达式为
综述所述,整理得四轴的动力学模型
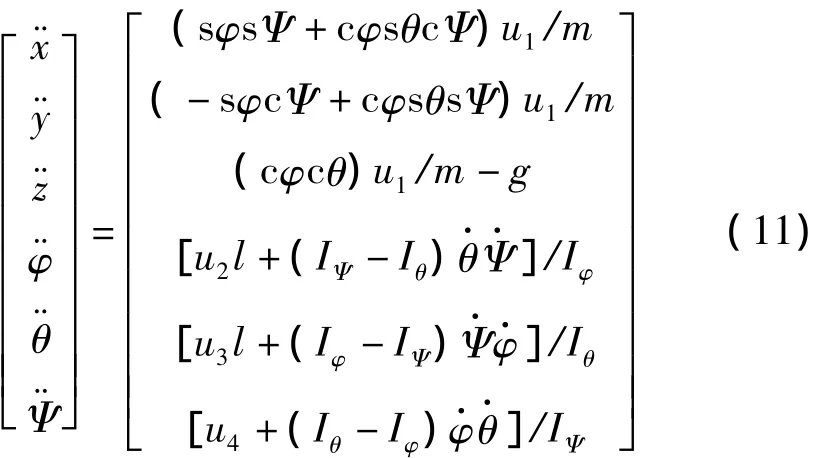
以上得到的动力学模型,是在假设的理想条件下得到的简化模型,故在实际应用中有较大的局限性。对四轴动力学模型进行简化,是为了减小后面进行仿真计算的难度,在进行初步的理论研究中可以接受。
2 飞行位置控制系统设计
四轴飞行控制由姿态控制和位置控制组成,两者间有直接耦合的关系,为使控制四轴到达某一预定位置,需通过控制姿态来实现。
2.1 控制系统结构
飞行位置控制系统分为两个回路,内回路为姿态控制回路,外回路为位置控制回路。位置控制回路控制四轴飞抵目标位置,姿态控制回路决定四轴飞行的姿态和轨迹。
位置控制回路根据目标位置信息,通过式(11)中的线运动动力学方程,反解出轨迹飞行需要的姿态角信息及系统控制输入量u1,输出给姿态控制回路。
姿态控制回路根据从位置控制回路得到的姿态角信息,通过式(11)中的角运动动力学方程,反解出系统控制输入量u2、u3和u4。将系统控制输入量u1、u2、u3和u4,输出给桨转速控制单元,反解出最终需要的桨速,实现期望的飞行姿态。
基于加速度积分计算的空间追踪模型[8],利用飞控板上的各传感器数据,得到四轴反馈过来的实时姿态信息和位置信息。四轴的控制算法采用串级PID控制,位置控制系统结构如图2所示。
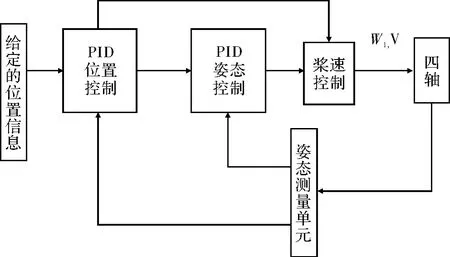
图2 四轴控制系统结构
2.2 改进型PID控制算法
四轴飞行控制运用的算法为改进后的PID算法,其是目前运用较为广泛的控制算法,具有结构简单、易于实现和鲁棒性好等优点。
文献[9]提出了一种积分分离PID控制算法,减小了积分的累计误差,避免了引起系统较大超调或振荡。根据四轴飞行器的飞行特性,将这一PID控制算法进行改进,入微分分离。
积分微分分离PID控制算法的表达式为

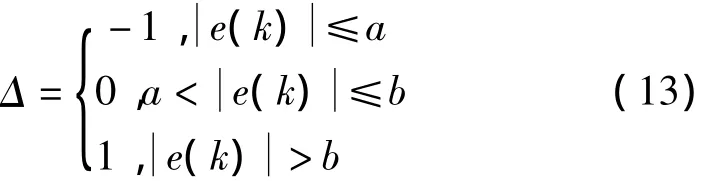
式中,a和b为实验获得的设定阈值,分别为1和10。
采用这种新型控制算法能够更具有针对性地快速减小误差,从而获得更满意的控制效果。当误差较小时,采用PI控制,以尽快消除稳态误差;当误差较大时,采用PD控制,以使偏差迅速减小。
3 Matlab仿真
利用Matlab中的Simulink模块搭建四轴飞行控制系统仿真模型,对其进行仿真研究,如图3所示。仿真模型主要由位置PID控制模块、姿态反解模块、姿态PID控制模块和位置反解模块组成。
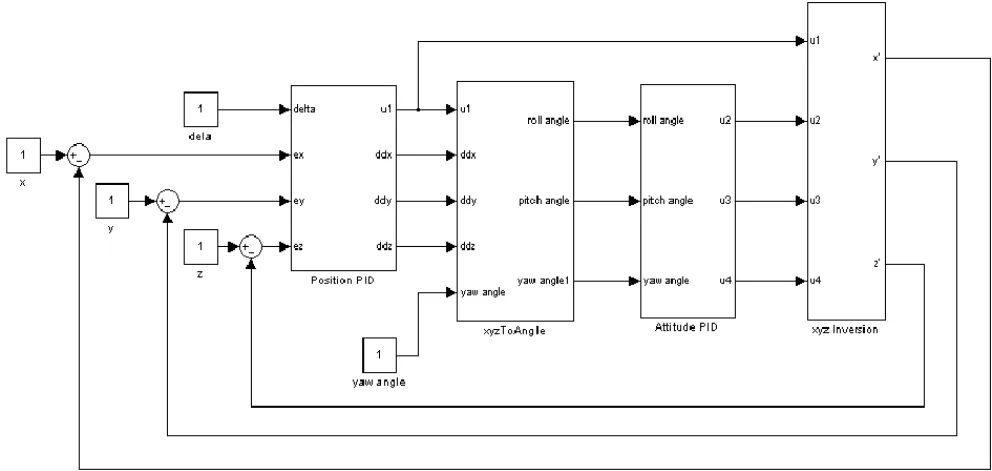
图3 四轴飞行控制系统仿真模型
地理参考坐标系E下,坐标原点记为O(0,0,0),给定的目标位置信息记为A(1,1,1)。假设四轴从O飞行至A,分别应用常规PID和本文提出的改进型PID算法,通过软件仿真得到3个位置坐标的响应曲线,两种算法的对比图如下。
图4为分别应用常规PID和改进型PID算法得到的位置X控制仿真曲线,图4(a)为常规曲线,图4(b)为改进后曲线。两条曲线均无超调且稳态误差为零,但后者更为平滑、快速性更好。这说明应用改进型算法,四轴能在更短的时间内更平稳地到达目标位置。
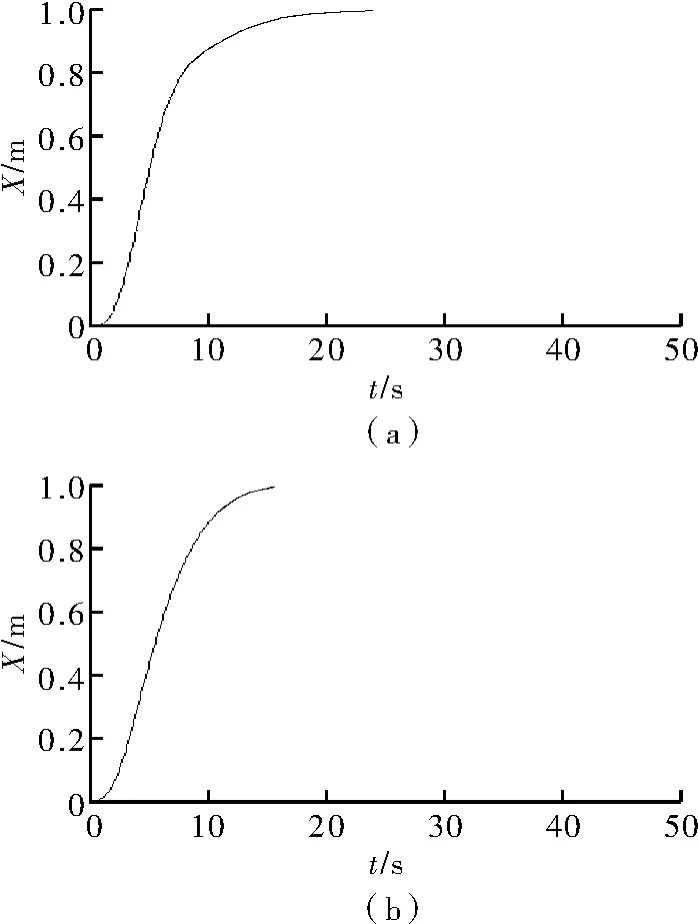
图4 位置X响应曲线对比
Y位置和Z位置的控制效果与X位置类似,具体如图5和图6所示。
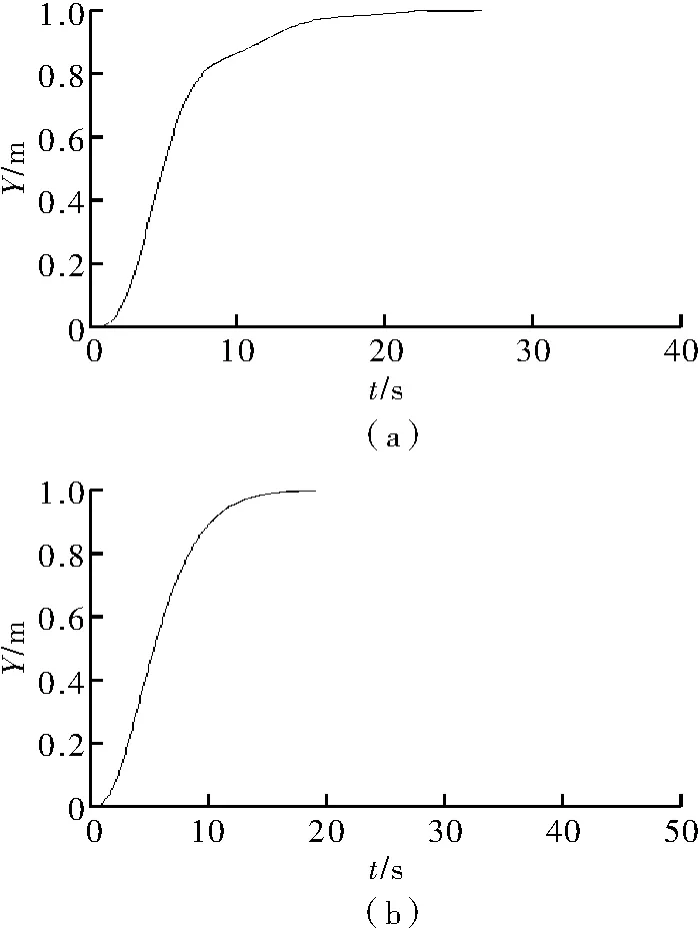
图5 位置Y响应曲线对比
4 结束语
对四轴的飞行原理进行研究后,根据牛顿第二定律和欧拉方程,建立了其准确的动力学模型。运用数学原理和控制理论,采用改进型的PID算法,设计了飞行位置控制系统。最后基于Matlab对所设计的飞行位置控制系统进行了仿真分析。仿真结果表明,所设计的飞行控制系统,达到了满意的控制性能,为将飞行控制系统应用到实际制作的四轴上,奠定了基础。

图6 位置Z响应曲线对比
[1]聂博文,马宏绪,王剑,等.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113 -117.
[2]Sureshk K,Kahn A D,Yavrucuk I.GTMARS - flight controls and computer archit-ecture[M].Atlanta:Georgia Institute of Techno-logy,2000.
[3]庞庆霈.四旋翼飞行器设计与稳定控制研究[D].北京:中国科学技术大学,2011.
[4]杨庆华,宋召青,时磊.四旋翼飞行器建模、控制与仿真[J].海军航空工程学院学报,2009,24(5):499 -502.
[5]张天光.捷联惯性导航技术[M].北京:国防工业出版杜,2007.
[6]Raymond WProuty.Helicopter performance,stability and control[M].Boston:PWSEngineering Boston,1986.
[7]程学功.四轴飞行器的设计与研究[D].杭州:杭州电子科技大学,2012.
[8]胡三庆.基于MEMS加速度传感器的空间运动轨迹追踪系统设计与实现[D].武汉:华中科技大学,2009.
[9]李素敏,王杰,宋北光.一种改进的PID控制算法[J].微计算机信息,2006(25):40-41.
猜你喜欢
数理化解题研究(2021年34期)2021-12-26
纺织科学研究(2020年1期)2020-05-21
自动化学报(2018年2期)2018-04-12
制造技术与机床(2017年6期)2018-01-19
中学生数理化·高二版(2016年7期)2016-05-14
通信电源技术(2016年4期)2016-04-04
北京航空航天大学学报(2016年3期)2016-02-27
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
空间控制技术与应用(2009年2期)2009-12-20
