基于云模型自适应算法的船舶航向控制
2015-12-15 07:47高键张凯
电子设计工程 2015年10期
高键,张凯
(江苏科技大学 电子信息学院,江苏 镇江 212000)
基于云模型自适应算法的船舶航向控制
高键,张凯
(江苏科技大学 电子信息学院,江苏 镇江 212000)
船舶在航行的过程中往往会受到各种非线性因素的干扰:海浪干扰、风速、负载变化等。所以在这样的情况下,我们需要设计一种非线性的控制器。本文通过设计出一种新型的云模型自适应规则控制器来对船舶的航向进行控制,与传统的PID控制比较,通过仿真曲线,可以看出该自适应云模型控制器更简单,直观,在控制性能上鲁棒性更强。
非线性控制器;云模型规则;船舶航向;智能控制
船舶航向的研究是从19世纪随着自动舵的出现开始的,最开始的自动舵也就是简单的比例调节,之后又产生了PID舵等,而随着自动控制理论的发展,新型的控制方法层出不穷,自适应控制,智能控制等。文献[1]就提出了一种基于神经网络的自适应输出反馈的船舶航向控制,应用线性观测器进行估计。文献[2]提出了船舶航向模糊自适应的控制手段,利用模糊控制和自适应控制相结合的手段对船舶航向进行控制。而李德毅教授提出的云模型,是一种基于定性概念和定量概念的综合,在云模型理论的基础上,本文提出了一种新型的云模型映射器。通过云模型的三个数字特征:期望、熵、超熵来表现一个整体,然后通过仿真验证,设计出合适的云映射,在一定程度上解决了非线性的干扰问题,相比传统的PID控制和之前的模糊智能控制体现除了优越性,可以为今后的船舶航向控制中做为参考,提高船舶的经济性和可靠性。
1 船舶航向控制的数学模型
船舶航向控制系统的数学模型如图1所示。
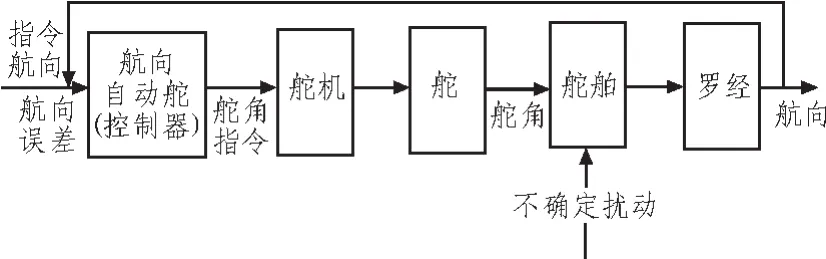
图1 船舶数学模型模型Fig.1 Ship mathematical model
数学模型来自参考文献[3]。
由船舶运动的8个数学参数:船速、船舶俩柱间长、船宽、排水量、满载吃水、舵叶面积、方形系数和船舶重心距中心距离从而求得“育龙”轮的模型为:

2 云模型的基本概念
2.1 云模型的概念
云模型是用语言的值来表示定性概念和定量表示之间的不确定性的一种转换模型,它把概念的模糊性和随机性统一在了一起,并且构成了定性与定量间的相互映射,如图2所示。
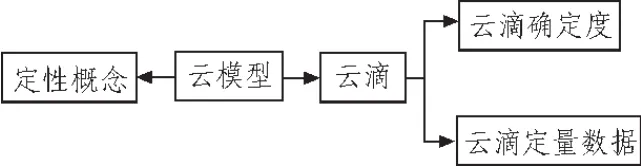
图2 云模型映射关系Fig.2 Cloud model mapping relationship
设U是用精确数值表示的定量论域,A是U上相应的定性概念。若定量值x∈U,且x是定性概念A在论域U上的一次具有类正态分布的随机实现,x对A的确定度A(x)∈[0,1]也是具有类正态分布的随机数,则数据元组(x,A(x))称为云滴,则称论域U中全部元素xi(i=1,2,…n)与其对A的确定度A(xi),即n个数据元组(x,A(xi)),构成具有n个云滴的云模型,称x在论域U上的分布为云分布[4]。
2.2 云模型的数学特征
期望Ex,熵En,超熵He。
1)隶属云的期望:隶属云覆盖范围的重心下所对应的论域值,它反应了相应的模糊概念的信息中心值。
2)隶属云的熵:指隶属云的期望曲线的带宽,它反应了模糊概念的亦此亦彼性的裕度。由Ex,En两个数字特征值便确定了具有正态分布形式的隶属云期望曲线方程

3)隶属云的超熵:隶属云期望曲线上任一点所对应的隶属都随机分布的方差,反应了隶属云的离散程度[5]。
3 云模型映射器
一维云模型映射器:控制器的本质实际上就是从输入偏差到输出控制量的一种映射关系,不同的控制器会有不同的映射效果,而云模型映射器就是根据不同的云模型的对应守则来确定这种控制关系。云模型的映射规则由映射前条件和映射后条件构成,也称为规则前件和规则后件。如果已知云模型(Ex,En,He)和指定的输入x=x0,就称为X条件云模型,记做CMx;当X条件云模型的输出u刺激了另外的Y条件云模型时(称为CMy),产生了一个u对应的y值。这时便达到了一一映射的效果,从而产生控制。
具体的实施过程 :X条件云模型:

Y条件云模型:

其中R1(En,He)表示产生以En为期望,以He为方差的正态随机数,在(4)式中,当X>Ex时为‘+’,当X<Ex为‘-’。如图3所示。

图3 云模型映射器Fig.3 The mapping of cloud model
二维云模型映射器:二维云模型控制器实际上就是双输入,单输出的控制器。控制器的输入数据经过云化,产生大量的云滴,再由云模型控制规则,产生新的云模型的输出,最后进行云逆化从而产生控制量。
4 云模型自适应控制器
传统的PID云模型控制器是在 PID控制的基础上所形成的一种控制器。通过期望输出与实际输出的偏差e和其导数的云化模型通过自定义的云规则从而得到相应的输出来对控制对象进行控制。但是传统的云模型控制器不能进行对PID参数的实时整段,而采用自适应的方式可以对控制模型的PID参数进行实时修改,使其更加稳定,鲁棒性更强。
4.1 传统的云模型PD控制器
传统的云模型控制器采用一一对应的云规则,通过输出的偏差,经过自定义的云规则推理,得到相应的控制量。现定义输入偏差为:

输出控制量为:

定义云规则为if E=E1,Ep=Ep1;if E=E2,Ep=Ep2;if E= E3,Ep=Ep3;if E=E4,Ep=Ep4;if E=E5,Ep=Ep5;同理对微分也是一样。
Simulink仿真过程如图4所示。

图4 PD云模型控制器仿真图Fig.4 PD cloud model controller simulation map
4.2 云模型自适应PD控制
与传统云模型控制算法一样,也是通过输出的偏差和其导数来确定值,但不是控制量,而是PD控制的参数Kp和Kd,通过调整PD的参数来进行实时控制。现取
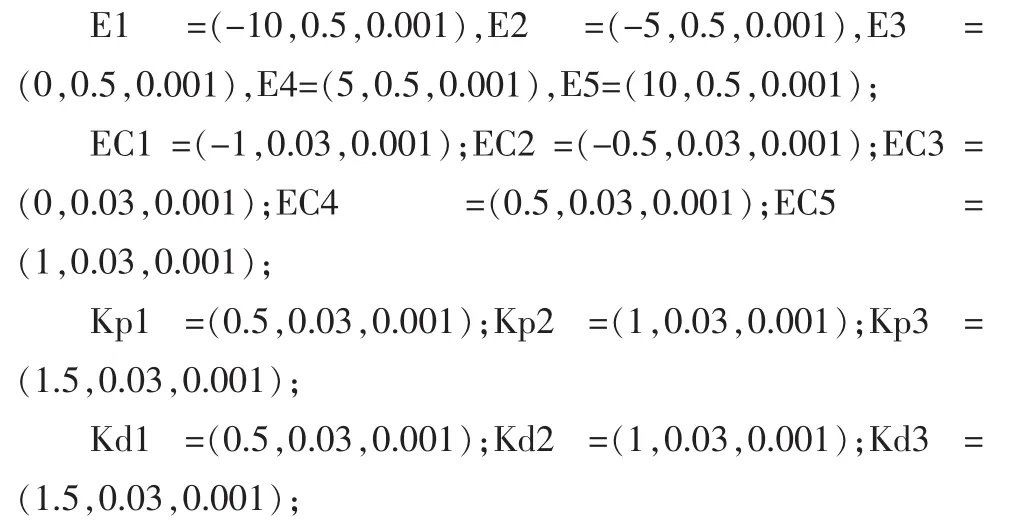
定义映射规则如表1和表2所示。
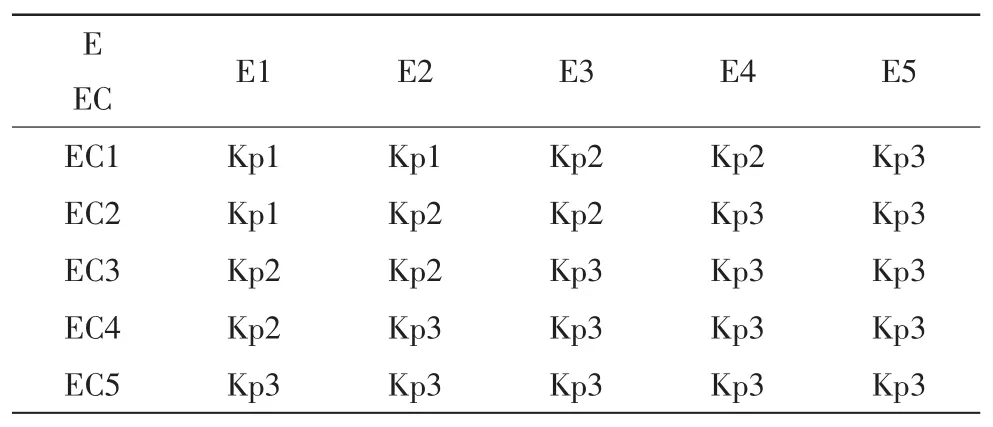
表1 比例系数云规则Tab.1 The cloud rule of ratio coefficient
Simulink仿真过程如图5所示。

图5 PD自适应云模型控制器仿真图Fig.5 PD adaptive cloud model controller simulation map
仿真图的对比,如图6所示。
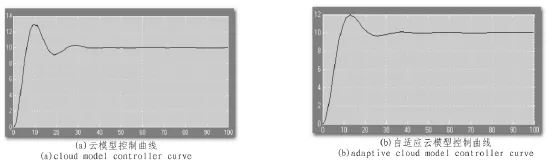
图6 仿真图比较Fig.6 Comparison of the simulation map
5 结论
本文在传统的模糊自适应控制上加入了由李德毅教授提出的云模型算法,并且将在传统的云模型PID算法上进行了改进,让其在线实时地对PD参数进行调节。由上图可以看出自适应云模型比传统的云模型控制效果使得系统的超调更小,但是调节时间不是很明显。
PID控制方式自诞生以来一直备受推崇,其稳定性和可靠性都深受人们青睐,但是在某些复杂情况下却不能达到很好的控制效果,随着模糊自适应控制在上世纪的提出,为人们开辟了更加广阔的视野,而云模型是将模糊更加深层次化,将定性与定量的结合,相比模糊控制更具有优越性和前瞻性,本文提出的一种云模型自适应算法也相当于是对之前的改进和提高。

表2 微分系数云规则Tab.2 The cloud rule of differential coefficient
[1]王志文.基于自适应输出反馈的船舶航向控制[J].北京理工大学学报,2011,31(4):425.WANG Zhi-wen.The ship course control based on adaptive outputfeedback[J].Journal of Beijing Institute of Technology,2011,31(4):425.
[2]刘晓明.船舶航向模糊自适应研究[D].上海:上海海运学院,2002.
[3]周蓉.船舶航向自适应PID控制器的设计与应用[D].大连:大连海事大学,2012.
[4]高博.无确定度逆向云模型新算法 [J].计算机应用研究,2013,30(8):22-62.GAO Bo.A new algorithm of uncertainty inverse cloud model[J].Computer Application Research,2013,30(8):22-62.
[5]李德毅.隶属云和隶属云发生器 [J].计算机研究与发展,1995,32(6):15.LI De-yi.The cloud and the cloud generator[J].Computer Research and Development,1995,32(6):15.
[6]高键.一种新的云模型控制器 [J].信息与控制,2005,34(2),157.GAO Jian.A new cloud model controller[J].Information and Control,2005,34(2):157.
[7]高键.船舶航向保持系统的研究 [J].江苏科技大学学报,2008,22(5):11.GAO Jian.The research of ship course keeping system[J] Journal of Jiangsu University of Science and Technology,2008,22(5):11.
Ship course control based on cloud model adaptive arithmetic
GAO Jian,ZHANG Kai
(School of Electronics and Information,Jiangsu University of Science and Technology,Zhenjiang 212000,China)
In the process of voyage,the ship always suffer from various of nonlinear disturbance:the wave interfere、wind speed and the load change and so on.So we need to design a kind of nonlinear controller in this circumstance.This paper presents a control to ship course through a new cloud model adaptive regulation controller,compared to traditional PID control,through the simulation curve,we can see that the adaptive cloud model controller is simple、directly perceived and has strong robustness in control performance.
nonlinear controller;cloud model regulation;ship course;intelligence control
TN081
A
1674-6236(2015)10-0036-03
2014-09-14 稿件编号:201409115
高 键(1964—),女,江苏南通人,博士研究生,副教授。研究方向:智能控制,电气自动化技术。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
成都信息工程大学学报(2021年5期)2021-12-30
新世纪智能(高一语文)(2021年3期)2021-07-16
成都信息工程大学学报(2021年6期)2021-02-12
民用飞机设计与研究(2019年4期)2019-05-21
中成药(2018年12期)2018-12-29
测控技术(2018年10期)2018-11-25
电子制作(2017年24期)2017-02-02
广东石油化工学院学报(2016年3期)2016-05-17
体育科学研究(2015年5期)2015-02-28