车联网专用短程通信技术
2015-12-09 07:03田大新
中兴通讯技术 2015年6期
关键词:性能测试
田大新


摘要:通过对车路通信系统的设计,车载、路侧通信单元的开发,车路通信系统测试平台的搭建及测试,指出车路通信系统是车联网系统的通信链路保障,而基于专用短程通信(DSRC)的车路通信系统可以大幅度降低通信延迟,保障了高速、网络拓扑结构频繁变化的车辆网络质量,为车车、车路间提供更为可靠、稳定、高效的通信服务。
关键词: 专用短程通信技术;车路通信系统;性能测试
随着中国人口数量、机动车保有量、路网结构、城市规模的不断增长与扩张,交通拥堵、交通安全、节能减排成为新时期交通发展聚焦的三大热点。近年来,世界范围内的智能交通研发热潮推动了交通行业的推陈革新,现代交通将逐渐向更加高效、安全、环保的方向发展。移动互联网技术的迅猛发展为交通技术的革新提供了机遇,智能交通已广泛利用无线通信技术实现数据共享,形成了以智能车辆、智能道路、智能终端为主流的发展方向。车联网作为引领未来的前沿技术,已经成为国际智能交通领域研究的新热点。
在车联网环境下,车与车、车与路之间通过无线通信手段,实现实时的信息交互融合。车与车之间通过位置信息的共享,可以相互感知;结合先进的传感器技术,车辆控制技术即可实现车车之间的协同避险,队列跟驰。在典型应用场景如十字交叉路口,车与交通信号灯系统信息交互融合,车辆可以获得信号灯的绿灯剩余时间,通过自身车速、位置信息即可判断能否正常通过交叉口,并可以帮助驾驶员合理地做出选择,避免车辆进入交通信号灯“两难区”,降低发生交通事故或引起交通拥堵的可能性;在高速公路或城市道路路侧,则提供了无线服务接入点,方便驾驶员实时获得天气、路况、限速等信息,同时可为乘车旅客提供优质的互联网娱乐服务;在出现应急事件如重大交通事故,由智能道路或其他手段感知事故点基本情况,将信息快速反馈到交通指挥中心,指挥中心根据事故情况做出合适的部署,妥善应对各种应急事件。
由此可见,车联网、车路协同技术是改善现存交通问题的有效途径,其中移动无线通信技术对保障车车、车路顺利进行信息交互融合,提升交通效率、安全等因素起到至关重要的作用。因此,为车车、车路建立一个低延迟、质量可靠、抗干扰能力强的无线通信环境就显得十分必要。由于专用短程通信(DSRC)技术在延迟、移动性、通信距离方面有着无可替代的优势,特别适用于车辆安全应用。目前全球范围内的大多车路协同项目的研究,均采用DSRC技术建立车辆网络。美国麻省理工学院Mythili Vutukuru等提出了一种基于传输误码率、信噪比自反馈的比特率自选择协议栈 SoftRate,吞吐量较传输控制协议(TCP)/IP提高近4倍[1];Jakob Eriksson等研发了基于车车、车路通信的Carbernet网络协议栈,开发了QuickWifi客户端,降低行车中用户与Wi-Fi接入点的连接时间,其相应开发的Carbernet网络传输层协议(CTP),吞吐量[2]较TCP/IP增加近2倍;俄亥俄州立大学Eylem Ekici等研究了适合与车辆自组织网络(VANETs)的跨层协议栈,并提出一种网络协议栈PROMPT,该协议栈可选择最小延迟的数据传输路径,完成多跳通信[3]。文章则介绍了适用于车联网应用的专用短程通信系统。
1 通信系统及协议栈
1.1 通信系统
随着车辆中加装的传感器增多,数据采集量也相应增加,因此处理数据、融合数据对计算机性能需求不断提高。由于应用平台需要执行多种复杂的应用程序来完成大量复杂计算,因此选择一台独立的计算单元作为应用平台可以提高数据处理效率。
图1为平台通信模式,其中主机端执行应用程序,路由端负责数据传输,主机端与路由端共同组成一个车载通信单元。图1中还展示了两辆不同车辆中通信单元1与单元2间的通信:主机端负责处理数据,并通过用户数据包协议传递数据到路由端,路由端采用基于非IP的通信协议栈,车载通信单元间通过802.11p物理层无线传输数据,实现信息交互融合。
1.2 通信协议栈
参考开放式系统互联(OSI)模型,并根据相关工作需求,我们设计了如图2的通信协议栈,其中网络层/传输层能够兼容非IP与IP协议[4-12]。
2软硬件架构
2.1 软件平台
车路通信系统中车载通信单元的开发平台可以分为两部分:应用平台和通信平台。应用平台执行应用程序,如处理各式传感器采集车路状态信息,提供管理配置图形化操作界面等功能;而通信平台,由无线传输硬件设备和通信协议栈组成,可由应用程序调用,实现车车、车路信息交互融合。通信平台包含软件部分与硬件部分。
2.2 硬件平台
应用平台、通信平台分别在独立单元中实现。其中通信平台在MIPS架构嵌入式设备实现,并以独立终端方式出现,最终实现车路通信功能。硬件组成结构如图3所示。
3 实验测试
3.1 测试方案
测试采用2台DSRC车载通信终端(OBU),1台DSRC路侧通信终端(RSU),3台计算单元,2台实验车,所有终端均通过网线与计算机单元相连,其中OBU终端与计算机单元组成的设备布设在实验车中,RSU终端与计算机单元组成的设备布设在路侧,计算单元运行测试程序,将测试消息发送到终端,再由终端将其广播;OBU终端的天线需放置在实验车车顶,RSU终端的天线需放置较高位置,3个天线之间始终保持无遮挡状态。测试场景如图4所示,道路两侧存在树木和建筑物等DSRC信号干扰源。确定实验环境后,首先测定车载通信单元在该环境下的最远通信距离,其后进行实验测试。
3.1.1 单跳通信距离
如图5所示,节点A包含OBU,并处于静止状态;节点B包含OBU,以速度0~120 km/h从A旁行驶,保证通信链路始终保持连接,数据包持续收发。当节点B行驶至不能收到数据包时刻,节点 A与节点B间距距离即为最远通信距离。
实测最远通信距离的结果约为256 m,因此限定节点A与B的最远相对距离为200 m,进行后续实验。
3.1.2 通信延迟
如图6所示,节点A包含RSU,并处于静止状态;而节点 B包含OBU,以速度0~120 km/h行驶。在-150~150 m范围内,节点B起点与终点间中点视为0点,测试程序输出车路通信延迟。
3.2性能测试结果
实验结果如图7所示,车路通信单元之间的距离对组网延迟几乎没有影响。文中提出的非IP协议组网延迟约为46 ms,而基于IP方式组网延迟约为92 ms,相较非IP方式组网延迟高出约1倍。
实验结果如图8所示,车路通信单元之间的距离对通信延迟几乎没有影响,文章提出的非IP协议通信延迟约为49 ms,而基于IP方式的互联网控制报文协议(ICMP)通信延迟约为144 ms,相较非IP方式通信延迟高出约2倍。
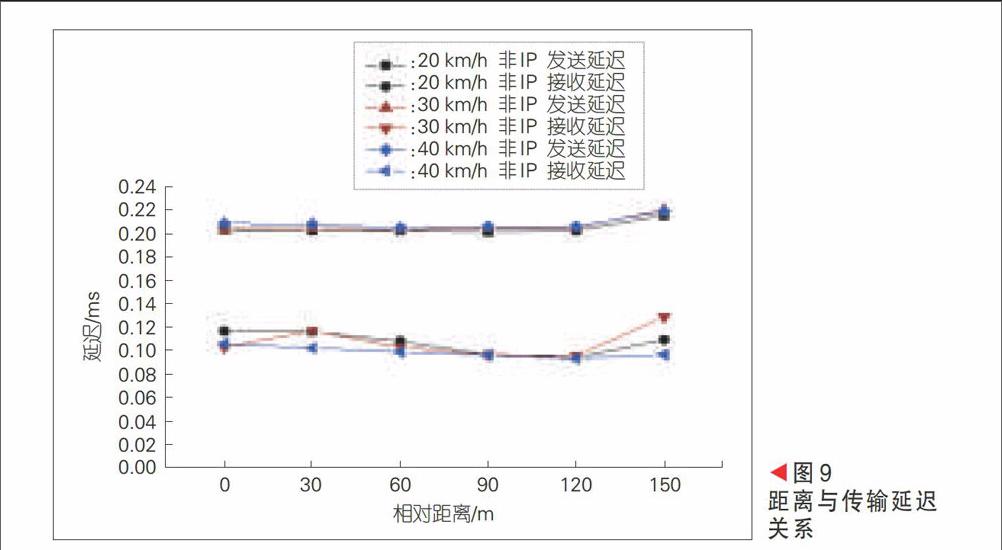
实验结果如图9显示车路通信单元之间的距离、车辆的行驶速度对传输延迟几乎没有影响,本文提出的非IP协议传输延迟约为0.2 ms。
4 结束语
文章研究的车联网专用短程通信单元的单跳通信距离约256 m,通信延迟约为50 ms,对速度、距离等干扰因素具有一定适应能力,通信延迟短,因此该终端完全满足车车、车路通信链路的两项重要指标,可以为车路协同系统提供低延迟、稳定可靠的通信服务。
参考文献
[1] VUTUKURU M, BALAKRISHNAN H, and JAMIESON K. Cross-Layer Wireless Bit Rate Adaptation [C]// in Proceedings of the ACM SIGCOMM 2009 Conference on Data Communication, Barcelona, Spain, 2009:3-14
[2] ERIKSSON J, BALAKRISHNAN H, and MADDEN S. Cabernet: Vehicular Content Delivery Using WiFi[C]// MobiCom'08 Proceedings of the 14th ACM International Conference on Mobile Computing and Networking, San Francisco, USA, 2008:199-210
[3] JARUPAN B and EKICI E. A Survey of Cross-layer Design for VANETs [J]. Ad Hoc Networks, 2011, 9(5): 966-983
[4] European Commission, M453. Standardization Mandate Addressed to CEN, CENELEC and ETSI in the Field of Information and Communication Technologies to Support the Interoperability of Co-operative Systems for Intelligent Transport in the European Community [S]. Brussels: European Commission, 2009
[5] ISO 29281 Intelligent transport systems- Communications Access for Land Mobiles (CALM)-Non-IP Networking [S]. International Classification for Standards, 2011
[6] IEEE Standard 802.11p IEEE Standard for Information technology — Telecommunications and Information Exchange between Systems — Local and Metropolitan Networks — Specific Requirements — Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications — Amendment 6: Wireless Access in Vehicular Environments [S].New York: IEEE Computer Society, 2010
[7] IEEE Standard 1609.1 Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE) — Resource Manager[S].New York: IEEE Vehicular Technology Society, 2006
[8] IEEE Standard 1609.2 IEEE Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE) — Security Services for Applications and Management Messages[S].New York: IEEE Vehicular Technology Society, 2006
[9] IEEE Standard 1609.3 IEEE Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE) — Networking Services[S].New York: IEEE Vehicular Technology Society, 2007
[10] IEEE Standard 1609.4 IEEE Trial-Use Standard for Wireless Access in Vehicular Environments (WAVE) — Multi-Channel Operation[S].New York: IEEE Vehicular Technology Society, 2006
[11] STEVENS W R, FENNER B, RUDOFF A M. Unix网络编程 卷1:套接字联网API [M]. 北京: 人民邮电出版社, 2010:77-96,580-622
[12] MORGAN Y L. Notes on DSRC & WAVE Standards Suite: Its Architecture, Design, and Characteristics [J]. IEEE Communications, Surveys& Tutorials, 2009:1-15
猜你喜欢
大陆桥视野·下(2016年11期)2017-02-28
软件导刊(2016年12期)2017-01-21
电脑知识与技术(2016年15期)2016-07-04
科技与创新(2016年3期)2016-03-15
科技与创新(2015年19期)2015-10-14
中国纤检(2015年3期)2015-03-13