
图像处理及存储显示一体化系统设计
2015-12-07 06:58曹立华
新媒体研究 2015年14期
曹立华
中国科学院长春光学精密机械与物理研究所,吉林长春 130033
图像处理及存储显示一体化系统设计
曹立华
中国科学院长春光学精密机械与物理研究所,吉林长春 130033
本文详细论述了基于高性能工控机平台的图像处理及存储显示一体化系统设计。利用数字图像采集卡实时接收红外传感器输出的数字图像信号,利用工控机CPU利用接收到的数字图像信号进行目标定位、图像实时存储及图像增强处理等操作。文中详细论述了硬件组成及软件工作原理,给出了试验结果及结论图片。
高性能工控机;数字图像;图像实时存储
目前红外图像处理技术随着红外图像传感器的发展得到了极大的发展,红外图像传感器有着可见光传感器无法比拟的优点,基本上可以实现全天候工作,其主要民用应用领域为监控、森林防火、道路监察及高精度位置测量等。军用应用领域为光电经纬仪及红外告警等。
20世纪90年代以后,随着高性能计算机技术的提高及图像处理技术的飞速发展,可以在高性能计算机上实现很多以前无法实现的功能,可以将很多功能集成在同一台计算机上进行综合处理,减少了中间处理环节的费用降低了成本。
文中介绍的系统采用一台高性能工控机实现了数字图像的目标定位、图像实时存储及图像增强输出,详细介绍了硬件组成及软件构成框架,并对每一部分进行了详细论述。
1 系统组成原理
显示系统组成原理如图1所示。
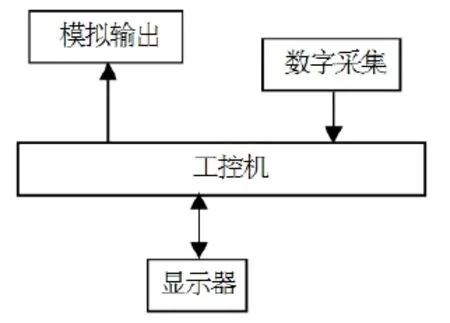
图1 光电编码器整体结构图
如图1所示,工控机为显示系统功能核心。各部分完成功能如下。
1)高性能工控机负责对数数字图像进行目标定位、图像存储及增强处理,输出8位图像数据作为输出数据源。
2)采用数字图像采集卡实时采集数字图像。
3)标准模拟图像输出卡用于输出8位数字图像进。
2 系统硬件配置
高性能工控机选用研华公司生产的工业计算机,可支持3.6 GHzI7处理器,前端总线达1 GHz;可支持通道DDR3内存,最大可扩展到32G,本系统采用16G内存。
3 系统软件配置
3.1 软件整体框架
考虑到高性能工控机I7处理器具有4核8线程的特性,同时系统需要完成目标提取、图像存储及实时增强3项功能,在软件结构上采用4线程处理机制,即图像数据获取及分配线程、目标提取线程、图像存储线程及实时增强线程。
各线程间的关系如图2所示。
各线程功能如下:
图像数据获取及分配线程的功能为当采集卡中断产生时,实时获取图像数据,为去3个线程提供图像数据。
目标提取线程的功能为在图像中定位目标,计算出目标的精确位置信息。
图像存储线程的功能为实时存储图像数据,为事后处理提供数据源。
实时增强线程的功能为将图像进行增强处理,输出显示。
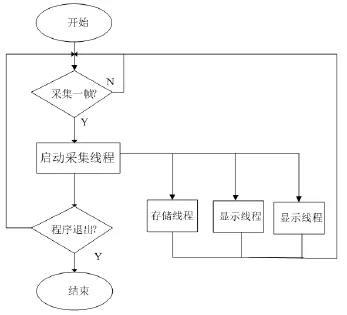
图2 软件多线程结构
3.2 目标提取
采用形心方法进行目标提取。根据目标特征自适应的计算目标阈值,根据目标阈值二值化图像数据,根据如下目标二阶矩公式计算出目标位置信息。

计算目标二阶矩公式是一个集团统计过程,不是个别点的位置信息,因此具有稳定性好,精度高的特点。
3.3 图像存储
为了保证图像数据存储的实时性,采用具有64MB缓存的SATA2高转速硬盘作为介质,其大容量的缓存能够保证数据写入硬盘的连续性和稳定性,防止由于硬盘磁头跳转等因素造成数据无法及时写入现象的发生。
在开启图像数据存储线程后,系统首先分配两块较大的内存空间,每块空间约可存储50帧的图像数据,系统采用乒乓操作方式,图像采集卡采集到的图像数据首先存储到其中的一块内存中,当该块内存写满后,转而写入另外一块内存,同时将第一块内存中的数据写入硬盘,从而从软件角度构建硬盘二级缓存,保证数据的完整和实时性。
每帧图像的数据大小为640×512×2=0.655 MB字节,按照帧频为100 F/s计算,则1秒钟存储量为:
(640×512×2)×100=65.5 MB
选择1 TB硬盘,可以存储时间约为4.2 h。
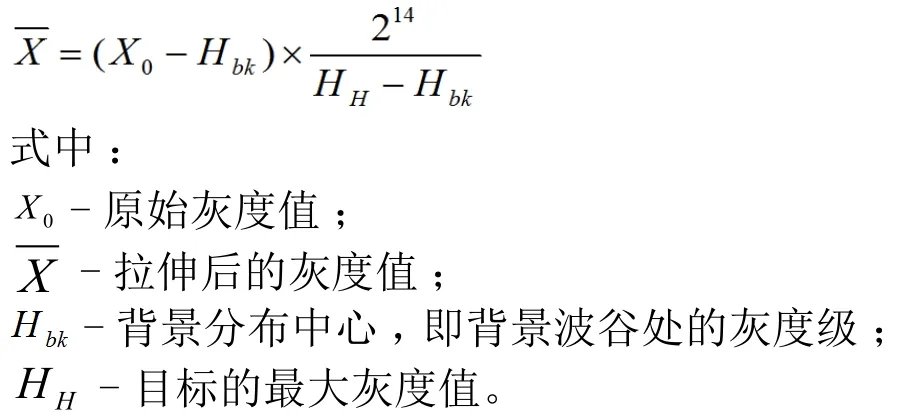
3.4 图像增强
灰度拉伸采取线性拉伸方法,即采用线性公式对灰度值分布在(,HH)区间的像元进行拉伸:
4 结论
本文以高性能工控机为核心,设计了一体化系统,实现目标定位、图像实时存储及图像增强输出3种功能。给出了具体的硬件电路设计和软件设计,系统实时性好、稳定可靠,在实际处理中有非常广泛的应用前景。
[1]葛文奇.红外探测技术的进展应用及发展趋势[J].红外技术与应用,2007(5):1.
[2]吕立波.红外探测技术的发展及应用[J].CPSE第十一届全会,2004(11):93-97.
[3]徐松涛,等.红外辐射在生物学、医学、光通信中的应用及其检测[M].北京:北京科学技术文献出版社,1997:118-123.
G2
A
2096-0360(2015)14-0019-02
曹立华,研究方向为图像处理。
猜你喜欢
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
山西电子技术(2021年3期)2021-06-28
铁道通信信号(2020年12期)2020-03-29
网络安全技术与应用(2020年1期)2020-01-07
通信技术(2019年9期)2019-10-09
制造技术与机床(2018年11期)2018-11-23
艺术品鉴证.中国艺术金融(2018年12期)2018-08-26
中国工程咨询(2016年10期)2016-01-31
中央民族大学学报(自然科学版)(2015年2期)2015-06-09
自动化博览(2014年6期)2014-02-28
