
基于物联网的云视频监控平台实现与调度方法
2015-12-07 06:12皮春春李文翔韩梅刘洁陈英杰栾卓
软件导刊 2015年11期
皮春春 李文翔 韩梅 刘洁 陈英杰 栾卓
摘要摘要:面向便捷部署的视频应用需求,设计基于物联网的云视频监控系统,阐述调度器的功能架构及关键处理算法的实现方法。基于遗传算法开发面向总时延最小化的调度方法,实现分布式处理节点的高效协作。仿真结果表明,该调度方法能提供较小的处理和传输时延,且能有效避免共用无线信道传输所带来的冲突。
关键词关键词:视频监控;物联网;云计算;调度
DOIDOI:10.11907/rjdk.151911
中图分类号:TP301
文献标识码:A文章编号文章编号:16727800(2015)011001403
基金项目基金项目:教育部留学回国人员科研启动基金项目(2015) ;湖北省教育厅科研计划项目(Q20141110);湖北省大学生创新创业训练计划项目(201410488046);武汉科技大学大学生创新基金项目(14ZRA140)
作者简介作者简介:皮春春(1993-),男,湖南澧县人,武汉科技大学电子信息工程学院学生,研究方向为嵌入式系统;李文翔(1979-),男,湖北武汉人,博士,武汉科技大学信息科学与工程学院副教授,研究方向为无线传感网。
0引言
随着国民经济的迅速发展及信息技术的应用,以主动预防为特色的视频监控系统在各场合的应用日渐广泛[1],用户对视频监控功能的需求也逐步多元化与系统化,主要表现在随机部署、高承载能力、智能处理功能等方面。视频监控系统目前正向第4代基于云计算的方向发展[2]。其中,基于物联网实现的云视频监控系统具有分布式运行/集中控制、多用户/大数据量支持、扩展性强及轻便低成本等优点,能实现对视频信息的分布式实时采集和处理,直接为用户提供满意的处理结果。目前,这方面研究还存在如下挑战:①热点关注现象容易产生局部甚至全局的数据拥塞,影响误码率、切换效率、时延、带宽稳定性等指标,使视频出现马赛克、跳屏、停顿等现象;②用户需求的提升,会带来更高的系统部署代价和运行开销。因此需要均衡利用能量有限的嵌入式节点,延长网络及监控系统的使用寿命;③本项目基于含有多个分布式嵌入式节点的物联网来设计视频监控云平台,针对含有不同处理步骤的视频处理应用,开发选择合适算法处理节点的智能调度方法,以提供应对以上问题和挑战的有效方法。
1架构与实体描述
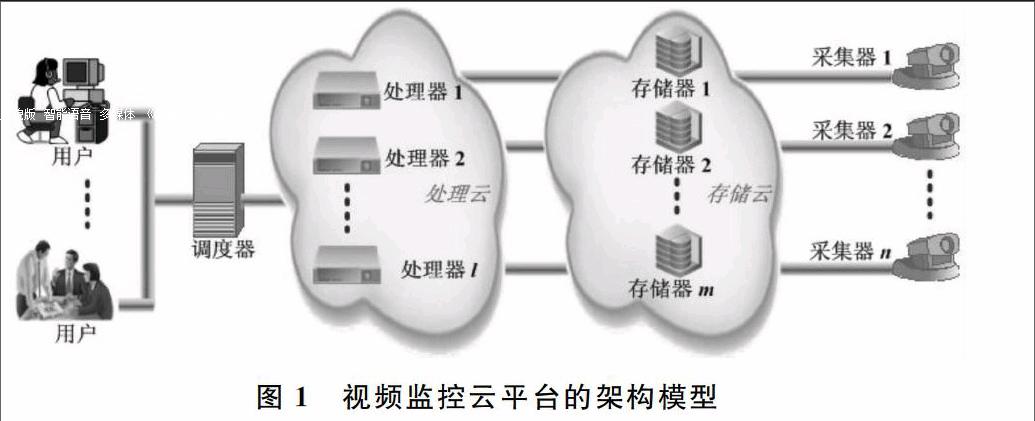
系统架构如图1,其中处理云和存储云分别为处理及存储视频的资源池,包含调度器、处理器、存储器及采集器4类实体:①调度器:接收来自不同用户的请求,综合分析后,发出调度指令给相关的视频采集节点以及视频处理节点,同时定期获取各处理器、存储器、采集器及传输/处理的状态信息;②采集器:所在节点可具有移动性,依监控目标的方位部署,根据调度器指令采集所选地点的视频数据,将数据传送给相应的存储器;③存储器:所在节点可具有移动性,接收来自采集器的视频数据;④处理器:由于节点能力的限制,每个节点具有有限的几种视频处理功能,如修改视频分辨率、文件格式等,需要根据调度器指令协同完成工序,此后将结果转发给用户。
2软件功能设计
2.1调度器
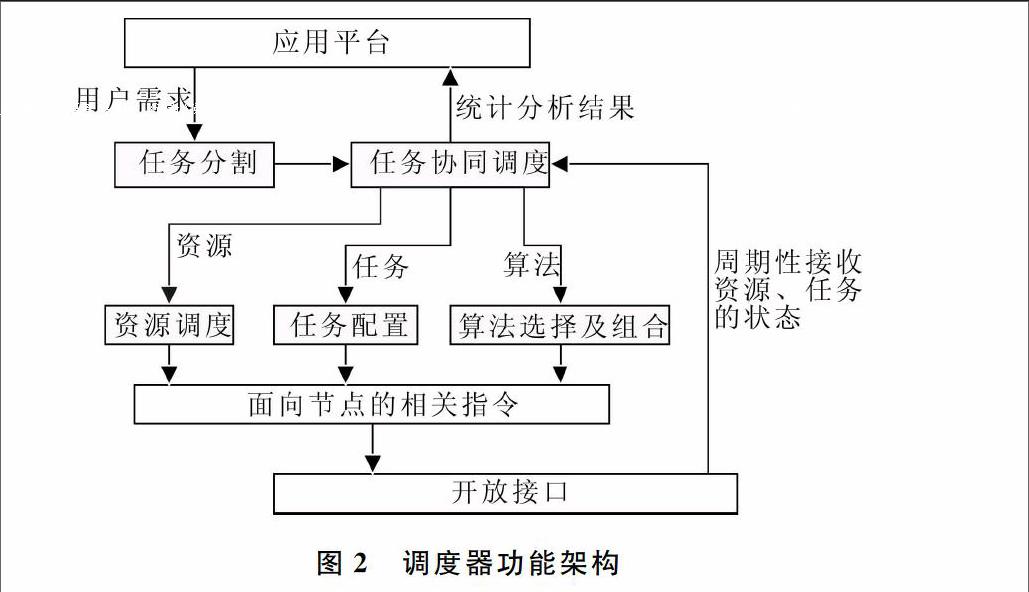
调度器功能架构如图2,其中调度器接收各用户随机到达的需求信息(包括用户的基本属性、当前位置和内容
需求描述),采集器、存储器及处理器周期性发来的状态信息(能耗、资源、资源利用率),以及当前运行中的处理任务的执行情况(完成进度、完成时间)[4]。调度器对各个用户需求加以分析,通过智能算法决策来设置监控的目标位置、视频处理的工序步骤、参与节点、资源供应和处理结果的传送目标,发出调度指令给相关的节点,并在执行完各处理任务后将结果数据返回给用户。
2.2典型视频处理算法
2.2.1基于自适应背景更新的运动目标检测
运动物体主要是道路上的车辆以及行人。帧间差分法是运动分割中最简单的一种方法。该方法是在连续的图像序列中两个或三个相邻帧间采用基于像素的帧间差分并且阈值化来提取图像的运动区域。在序列图像中,通过逐象素比较可直接求取前后两帧图像之间的差别[5]。
2.2.2基于粒子滤波方法实现运动手势的跟踪
运动手势跟踪是指对实时的视频序列连续帧中的每一帧都能实时确定其中人手的位置,描述人手的运动轨迹信息。现在常用的手势跟踪算法有:卡尔曼预测算法、粒子滤波算法、均值偏移算法等。本文采用粒子滤波算法,具体流程如下:①选取需要进行实时跟踪的目标;②对目标区域计算归一化颜色直方图作为观测模型,接着确定粒子数目,进行初始化;③计算每个粒子的颜色直方图,然后算出每个粒子与目标的巴氏距离,接着进行权值更新;④舍弃权重较小的粒子,复制权重大的粒子;⑤粒子权重表示其中心出现概率的大小,通过计算所有粒子权值的期望可找出跟踪目标手势的中心。
2.2.3基于神经网络的车牌识别
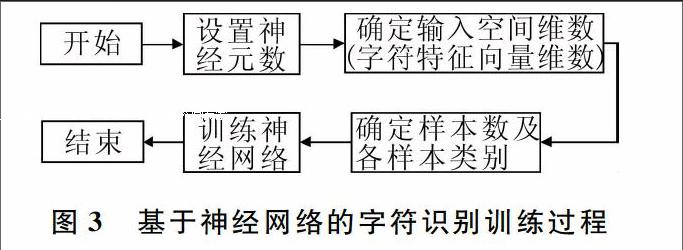
BP(Back Propagation)网络的一个重要用途就是用于模式识别,任务是要设计并训练一个可行的、高效的BP网络,以实现对车牌汉字、字母、数字和识别。经过图像预处理过程之后,将最终提取到的字符的特征送入BP网络进行训练及识别[6]。具体训练过程如图3所示。
3视频处理调度方法
3.1调度问题描述
各个视频处理器节点上实现了不同的算法功能,且各个应用的实现可能包含按某个顺序进行的多个算法的执行步骤,使得一个应用的实现需要多个处理器协同完成,各处理器节点的运作具有复杂的关联性,故需要建立最优化模型并用智能算法实现最优调度[7]。调度问题的建模要素如下:①各节点的当前负载;②各节点具有的算法功能集;③各节点上的各算法处理时延及处理结果的传输时延;④分解应用得到的处理算法集、及应用中实际所需处理的数据量。基于上述约束条件,为各个应用的各个分解处理算法分配合适的处理器,以满足诸如时延、能耗等的优化目标。
3.2基于遗传算法的调度方法实现
遗传算法[8]作为现代有关智能计算中的关键技术,不存在求导和函数连续性的限定,能直接对结构对象进行操作,且具有很好的自适应全局寻优能力,已被广泛应用于多个领域。采用遗传算法进行处理器调度的步骤如下:
(1) 适应度函数定义。给定当前待处理的所有任务分解得到m个算法,给定各算法STi(1≤i≤m)的处理完成时间TEi和处理结果的传输完成时间TCi。以总时延最小化为例的优化目标对应的适应度函数表示为:
Fdelay=∑Nk=1αk∑mi=1(TEi+TCi)(1)
其中,N为处理节点总数,αk为第k个节点上所有算法处理及传输时间发生重合的比例因子,其值越小,则各步骤之间产生影响的概率越小。
(2) 初始种群生成。每个染色体包含m个基因,每个基因对应一个算法,基因的取值为所分配的处理器的编号、开始处理时间及开始传输时间。随机生成N个染色体作为初始种群。
(3) 选择。对每个染色体计算适应度函数值,选择适应度函数最高的N/2个染色体进行后继步骤。
(4) 交叉与变异操作。交叉模仿自然界的基因重组过程,生成包含更优良基因结构的新个体。文中对所选的N/2个染色体进行随机配对,并选择随机的基因起点进行交叉。变异可拓展新的搜索空间,在种群局部收敛时,通过变异可以保持种群多样性。本文中选择随机的基因进行变异,替换成其它具有相同功能的处理器。这样新生成N/2个染色体。
(5) 算法判定。当算法执行轮数未达到阈值且适应度函数值未收敛时,在所有3N/2个染色体中选择适应度最高的N个作为新种群,回到步骤(3)开始下一轮算法执行。否则输出适应度最高的染色体作为调度分配结果,算法终止。
4仿真实验与分析
基于Matlab平台下的仿真,将本文提出的遗传算法优化调度策略(GAO)与常见的随机调度策略(RAN)及机会均衡调度策略(BAL)进行比较。相关参数如下:处理节点N=20个,应用类型共6种(包括人脸识别、车流量统计、遗留物检测、视频编码、区域入侵检测及移动物体跟踪),各类应用含有3~5个步骤,相关处理算法共12种,每个算法的实例数目在4~6之间,平均数目为5个,则平均每个节点上实现算法12*5/20=3个,各节点上每KByte数据的处理时延取值在0.5s~1.5s之间,均值为1s,每KByte数据的传输时延取值在1s~3s,均值为2s。按照以上参数的约束,随机构建30个不同的配置场景Ci,1≤i≤30,并对各个场景下的所有结果求平均,以体现结果的有效性和普适性。为方便起见,设各个节点的当前负载均为0。设定数据量从小到大的共10个应用场景,应用数目分别为5、10、15、…、50,每个应用的处理数据量范围是2~4M字节,均值为3M字节,体现不同程度的网络负载。
所提取的性能指标为总处理时延和总传输时延,结果如图4、图5所示。可以看出,随着应用场景中待处理数据量的增长,各调度方案的时延都随之增长。对于处理时延,RAN和BAL策略的结果接近,稍大于GAO策略。对于传输时延,GAO的最小,BAL的次之,而RAN策略的要明细大些,尤其是在大数据量时,其时延的增长尤为迅速,其原因在于此时通信冲突明显增加,重传、信道退避等行为明显延长了网络传输时间,而GAO方法则能有效的减少传输过程中无意义的时间消耗。整体上看,传输时延比处理时延要大得多。
5结语
本文云视频监控架构及优化调度方法,能以较低的部署和维护开销,方便地应用到动态部署的视频监控场合中,通过调度器有效的控制分布式处理节点的协作,实现高效处理和传输。仿真结果表明,该调度方法能提供较小的处理和传输时延,且能有效避免共用无线信道传输所带来的冲突。
图5传输时延仿真结果
参考文献参考文献:
[1]贺媛婧.“云教室”应用模式探讨[J].软件导刊.2015,14(5):199201.
[2]BARRIE SOSINSKY.Cloud computing bible[M].Wiley Publishing Inc.2011.
[3]王鑫,常静坤.视频监控联网系统中云媒体服务器的架构研究与设计[J].计算机与现代化,2014(10):2530.
[4]王菁,韩燕波.保护私有数据的云工作流调度方法.计算机集成制造系统,2013,19(8):18591867.
[5]廖斌.典型视频目标跟踪方法实现与分析[J].软件导刊,2015,14(1):136138.
[6]李敬.基于云计算的视频监控平台的研究[J].现代计算机,2014(13):6569.
[7]LARTIGAU JORICK,NIE LANSHUN,XU XIAOFEI,et al.Scheduling methodology for production services in cloud manufacturing[J].Proc.of Intl Joint Conference on Service Sciences,2012(12):3439.
[8]G FARUK.Process plan and part routing optimization in a dynamic flexible job shop scheduling environment:an optimization via simulation approach[J].Neural Computing and Applications,2013,23(6):16311641.
责任编辑(责任编辑:陈福时)
猜你喜欢
电脑知识与技术(2016年26期)2016-11-24
电脑知识与技术(2016年24期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
电脑知识与技术(2016年21期)2016-10-18
电脑知识与技术(2016年21期)2016-10-18
大学教育(2016年9期)2016-10-09
科技视界(2016年20期)2016-09-29
环球时报(2016-08-01)2016-08-01