基于电磁定位的软组织术中实时跟踪系统的开发*
2015-12-05 01:59马宝秋常小红卢虹冰
中国医学装备 2015年4期
刘 洋 马宝秋 徐 桓 常小红 卢虹冰*
基于电磁定位的软组织术中实时跟踪系统的开发*
刘 洋①马宝秋②徐 桓③常小红①卢虹冰①*
目的:开发软组织形变的实时跟踪系统,可有效提高胸腹部手术的精度,降低手术损伤率。方法:利用术前CT/MRI图像、术中超声成像与电磁定位系统相结合的方法,实时跟踪软组织形变。结果:通过结合术前图像高分辨率和术中超声实时性的优点,解决了软组织导航技术的关键问题,并通过试验验证了软组织形变跟踪技术在临床应用的可行性。结论:将术前、术中影像及电磁定位系统相结合,不仅为软组织形变实时跟踪提供了一个可行的手段,而且对胸腹部手术的术中导航技术的实施和应用奠定了基础。
软组织;形变跟踪;实时影像;电磁定位;超声
[First-author’s address] School of Biomedical Engineering, Fourth Military Medical University, Xi’an 710032, China.
影像引导下的计算机辅助手术是指利用光学、电磁及三维成像等技术手段,在手术过程中为医生提供直观的融合有病灶、关键组织和器官以及手术器械等信息的模拟手术场景导航图像的计算机技术[1]。该技术可增加医生对患者病灶及其周围解剖结构的理解,从而降低手术引起的组织损伤,减少手术并发症[2]。近年来,该技术在神经外科、耳鼻喉科、骨科(脊柱及关节)等手术中以及活检切除、组织消融等介入治疗中得到快速发展及广泛应用。
传统的图像导航系统建立在术前扫描图像构建的三维组织解剖结构模型基础上,但软组织易受到呼吸和身体运动等的影响,造成术前建立的三维模型不能正确反映术中的组织解剖结构,从而造成导航精度降低,甚至失败[3]。目前,临床上常用超声引导腹部微创手术和介入治疗,但由于超声有结构选择性,无法反映周围组织结构的全貌[4-5]。因此,将术前三维结构图像和术中超声图像相结合,对软组织形变进行实时跟踪,将为胸腹部手术的实施提供准确和定量依据[6]。
本研究针对软组织实时跟踪技术,通过将术前图像、术中超声实时成像与电磁定位系统相结合,利用多模态影像实现软组织结构的实时成像及软组织形变的实时跟踪,建立一个可跟踪软组织形变的软件、硬件框架,从而为研究基于图像引导的软组织术中计算机导航技术的实现及其在涉及软组织的开放和微创手术中的应用奠定基础。
1 软组织术中实时跟踪系统开发工具及总体设计
目前,基于视觉化工具函式库(visualization toolkit,VTK)的三维医学图像可视化已成为医学成像研究的热点[7-8]。VTK是免费、开源的计算机图形、图像处理和可视化工具,具有优秀的架构和运行机制,可实现多样化、可视化和交互式手术模拟及仿真。因此,本研究选用VTK作为系统交互式设计的实现工具,并利用Visual Studio 2005进行开发。
系统通过将高分辨率的术前CT/MRI影像、实时
超声图像及电磁定位系统有机的结合,实现了一种软组织形变实时跟踪的框架和方法。系统工作过程为:①将定位系统的坐标系与术前影像的坐标系进行配准;②成像系统采集软组织图像,同时采用定位系统获取成像系统所采集图像的位置及方向信息;③采集到的图像经过图像处理后根据其对应的位置及方向数据与术前影像共同进行配准、融合和显示。系统总体设计如图1所示。
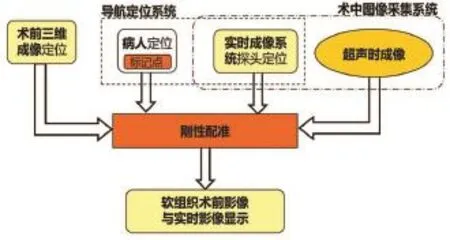
图1 系统总体设计框图
2 软组织术中实时跟踪硬件系统的搭建
系统的硬件设备包括电磁定位系统、超声设备及计算机处理平台。系统硬件构成及连接如图2所示。

图2 系统硬件构成及连接图
2.1 电磁定位系统
本研究采用Ascension公司生产的3D Guidance medSAFE平板电磁定位系统作为定位跟踪设备,定位系统由主机、发生器及接收器3部分组成,可获取6个自由度的信息(感应器所处的X、Y、Z位置和感应器的3个偏转角)。
2.2 超声设备
本研究采用超声设备进行软组织实时形变的跟踪,型号为Siemens Sequoia 512,空间分辨率为1 mm,帧数为30。超声设备具有多种信号输出接口,根据实验的具体情况采用S-Video的视频传输接口,并利用MV-750图像采集卡对超声图像进行输出。为了控制采集数据,在超声探头上固定一个微动开关,并将其通过引线与视频采集卡的外部控制接口输入端连接,当操作人员选定某个软组织切面的数据时按下该微动开关,实验软件会自动记录该幅图像。
2.3 定位与成像系统配合
由于超声是二维图像,且每一帧图像并不平行,为此,本研究将定位探针固定在超声探头上,利用电磁定位系统采集超声探头的位置信息,从而实时确定超声图像对应的空间位置和方向数据。
3 软组织术中实时跟踪软件系统的开发
在设计软件系统时,从软组织形变实时跟踪的角度出发,主要考虑如何在硬件系统的配合下能够使系统无缝的连接在一起。从操作的方便性考虑,软件程序包括配准、监测、硬件控制、图像处理及底层硬件接口5个模块,整体的软件系统架构如图3所示。
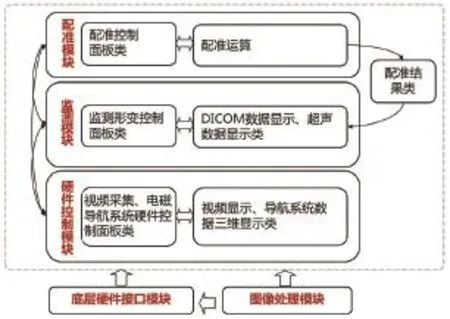
图3 软件系统框架结构图
3.1 配准模块
该模块主要负责配准功能,刚性配准计算简单,运算速度快,满足本研究对实时性的要求[9]。为此,本研究利用基于特征点的刚性配准算法对术前和术中图像进行配准,并利用VTK中的迭代最近点法进行刚性配准。
由于软组织的形变,使得到的超声图像与术前三维图像之间可能已经不再是刚性的关系,所以刚性变换只能达到近似的配准结果。在下步工作中,将进一步考虑在刚性配准的基础上进行可反映软组织形变的非刚性配准。
3.2 监测模块
该模块主要负责形变显示,包括软组织术前影像的显示,软组织实时超声图像的显示,以及实时超声图像与术前CT/MRI图像的融合显示等。
3.3 硬件控制模块
该模块负责电磁定位系统和视频采集系统等硬件的控制,同时还有超声探头的空间位置、方向获取及实时超声图像的抓取等。
3.4 图像处理模块
该模块中包括数字图像处理中的一些通用算法以及本研究所采用的超声图像去除噪声、标记点自动识别及中心点计算等算法。在超声图像中,散斑噪声是图像退化的主要原因,因此根据文献报道,本研究采用基于局部统计信息的滤波算法对超声图像进行滤波[10]。
标记点的自动识别,依赖于标记物的选取,本研究初步选用的是可在MRI下显影的维生素E球形胶囊,其材质比较均匀,因此采用简单的阈值分割的算法即可很好的识别出标记点。经过实验,在MRI的序列为t1_fl2d_icor,图像窗宽为2292的情况下,阈值为920~950,便可识别出完整的标记点。但在实验过程中,即使得到了标记点,也很难手动测量出标记点精确的中心位置,为此本研究通过几何计算,得出球体的中心,并将其作为标记点的物理中心位置。
3.5 硬件接口模块
该模块包括电磁导航系统及视频采集系统的硬件接口程序。通过该模块,上层的软件可以对底层硬件进行操作和设置。
4 软组织术中实时跟踪系统的验证
在建立系统硬件和软件框架的基础上,通过标记物固定、获取标记点位置和标记(配准)点的显示试验,验证采用术前MRI、实时超声及电磁定位导航系统相结合进行软组织形变实时跟踪的可行性(如图4所示)。
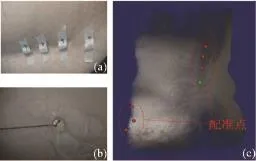
图4 图像配准过程示图
4.1 标记物的固定
本研究选择肾脏为感兴趣区域,根据MRI对软组织的成像优势选用MRI进行扫描,并选择可在MRI下显影的维生素E胶囊作为标记物。为了减小标记物的位移,将标记物尽量固定在不易发生形变的区域。其中,3个标记物用胶布固定在右胯外侧部位,接近于盆骨外端处,另4个标记物固定在背部腰椎L2、L3、L4、L5位置,如图4(a)所示。
4.2 术前数据扫描
通过MRI获取腹部三维图像,型号为Siemens 3T Magnetom Trio Tim。图像为256×224像素,层厚为5 mm,采用t1_fl2d_icor序列,TE为3.7,TR为207。
4.3 图像配准
通过建立的系统读取MRI数据,并自动识别所有7个标记点,计算出标记点中心在影像空间中的坐标。将固定有定位系统的探针尖端通过维生素E球形胶囊上的小管插入,并停留在胶囊内的球心位置,如图4(b)所示,由系统软件记录此时的空间坐标值,作为当前标记点中心在患者空间的坐标。通过影像空间与患者空间标记点的刚性配准,将术前的影像空间与患者空间对应。
4.4 多模显示
将经过配准后的超声图像与术前三维图像进行融合,在多模态显示区域,超声图像和术前三维影像配准后叠加在一起,深色区域为重建出的肾脏在超声截面上的形状与超声图像中肾脏叠加的区域(如图5所示)。
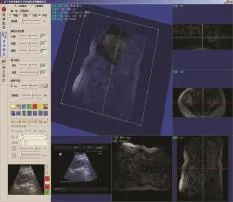
图5 配准后超声图像与术前三维图像的显示图
5 结论
本研究通过将术前三维影像、术中实时超声和电磁定位系统有机结合,设计并实现了一种术中软组织形变实时跟踪系统框架。基于该系统框架,可对感兴趣区域组织的结构和形变进行实时的跟踪,并通过试验初步验证了所提出形变跟踪技术的可行性。同时,本系统的开发将为临床提供适用于软组织手术的导航工具,辅助医生进行更为精确、安全及快速的手术治疗,从而提高手术治疗疗效。
[1]李雪琦,马宝秋,张国鹏,等.基于图像的计算机辅助软组织导航技术[J].医疗卫生装备,2011,32(2):125-126.
[2]Eliashar R,Sichel JY,Gross M,et al.Image guided navigation system-a new technology for complex endoscopic endonasal surgery[J]. Postgrad Med J,2003,79(938):686-690.
[3]Beller S,Hünerbein M,Lange T,et al.Imageguided surgery of liver metastases by three-
dimensional ultrasound-based optoelectronic navigation[J].Br J Surg,2007,94(7):866-875.
[4]Bao P,Sinha TK,Chen CC,et al.A prototype ultrasound-guided laparoscopic radiofrequency ablation system[J].Surg Endosc,2007,21(1):74-79.
[5]Torzilli G,Montorsi M,Donadon M,et al.“Radical but conservative”is the main goal for ultrasonography-guided liver resection:prospective validation of this approach[J].J Am Coll Surg,2005,201(4):517-528.
[6]Schicho K,Figl M,Donat M,et al.Stability of miniature electromagnetic tracking systems[J]. Phys Med Biol,2005,50(9):2089-2098.
[7]William JS,Lisa SA,William H.Visualizing with VTK:A Tutorial[J].IEEE Comput Graph Appl,2000,20(5):20-27.
[8]Will Schroeder,Ken Martin,Bill Lorensen.The visualization toolkit[M].Kitware:Prentice-Hall,2003.
[9]Konishi K,Nakamoto M,Kakeji Y,et al.A realtime navigation system for laparoscopic surgery based on three-dimensional ultrasound using magneto-optic hybrid tracking configuration[J]. Inter J Computer Assisted Radiology and Surgery,2007,2(1):1-10.
[10]Loizou CP,Pattichis CS,Christodoulou CI,et al. Comparative evaluation of despeckle filtering in ultrasound imaging of the carotid artery[J]. IEEE Trans Ultrason Ferroelectr Freq Control,2005,52(10):1653-1669.
The development of real-time tracking of soft tissue deformation based on electromagnetic positioning
/LIU Yang, MA Bao-qiu, XU Huan, et al// China Medical Equipment,2015,12(4):6-9.
Objective: The real-time and accurate tracking of soft tissue deformation can improve the accuracy of chest/abdominal operation and reduce damage. Methods: The preoperative CT/MRI images, intra-operative ultrasound image and electromagnetic tracking system were combined for real-time tracking of soft tissue deformation. Results: The system integrates advantage of high resolution of pre-operative images and real-time feature of ultrasound imaging for tracking the soft tissue deformation. Volunteer study has indicated feasibility of the system for clinical application. Conclusion: The combination of preoperative and intra-operative image and electromagnetic tracking system provides a possible means for the property study of soft tissue and lays the foundation for the implement and application of the chest/abdominal navigation.
Soft tissue; Deformation tracking; Real-time imaging; Electromagnetic tracking system; Ultrasound imaging
10.3969/J.ISSN.1672-8270.2015.04.002
1672-8270(2015)04-0006-04
R197.324
A
刘洋,男,(1981- ),博士,讲师。第四军医大学生物医学工程学院计算机应用教研室,研究方向:医学图像处理。
2014-12-27
国家自然科学基金(81230035)“基于影像定量分析和特征可视化的虚拟内窥镜关键技术研究”;军队重点项目(BWS14J038)青年项目(13QNP126)
①第四军医大学生物医学工程学院计算机应用教研室 陕西 西安 710032
②石家庄职业技术学院机电工程系 河北 石家庄 050081
③总后卫生部药品仪器检验所 北京 100071
*通讯作者:luhb@fmmu.edu.cn
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
当代陕西(2022年5期)2022-04-19
资源信息与工程(2021年5期)2022-01-15
军民两用技术与产品(2021年9期)2021-03-09
河南科学(2020年3期)2020-06-02
中国生物医学工程学报(2019年4期)2019-07-16
制造技术与机床(2017年3期)2017-06-23
智能建筑电气技术(2015年5期)2015-12-10
浙江人大(2014年1期)2014-03-20