
伽玛射线探伤仪自控输源系统设计
2015-12-03 07:03李建奎邓子龙李维军
电子测试 2015年17期
李建奎,刘 峰,邓子龙,李维军
(辽宁石油化工大学机械工程学院,抚顺,113001)
伽玛射线探伤仪自控输源系统设计
李建奎,刘 峰,邓子龙,李维军
(辽宁石油化工大学机械工程学院,抚顺,113001)
传统的射线探伤仪都采用手摇式装置,人工操作周期长,对人损伤较大。这里提供了一种射线探伤仪自控输源系统装置,该装置能够在保证高可靠性和操作安全性的基础上,实现射线探伤仪放射源的传送、限位、摇控以及射线探伤定时、报警等功能。
射线探伤仪;自控输源; 报警
0 引言
1 系统整体结构设计
设计能够实现自动收放伽玛射线源的附加传输装置,提高伽玛射线探伤仪的使用安全性和对操作人员的防护。该系统功能包括放射源的传送、限位、摇控以及射线探伤定时、报警等。
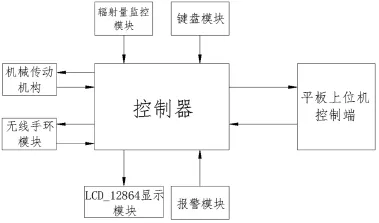
图1 自控放射源传输系统结构图
整个系统的结构图如图1所示。该系统主要由机械传动装置和主机控制两大部分组成;机械传动装置分为手动传动机构和自动传动机构,两部分可分别工作且互不干扰。系统主机控制部分中可以分为两部分,包括上位机平板电脑命令控制端、下位机控制器控制端。其中上位机平板电脑控制端包括平板电脑、上位机软件。下位机控制器控制端包括辐射量监控模块、无线手环模块、键盘模块、LCD_12864显示模块、报警模块。其中无线手环即手环远距离无线遥控装置,可以远距离对本系统装置进行远距离操作。
2 机械装置
利用原来的输入轴通过轮系组成一个传动箱,手动控制传动箱中一个滑移齿轮能使手动操作机构和自动操作机构分别进行工作,可以实现手动和自动两种互不干扰的操作方式。整个传动机构组成一个部件通过连接结构和原输源系统进行连接。系统机械传动机构如图2所示。
系统操作中手动操作与自动操作之间的切换是通过滑移齿轮来实现的,实现方式如图所示,齿轮4与齿轮6为主动齿轮,对应的齿轮11与齿轮10为从动齿轮。图示定位机构位于b处,传动处于未连接状态。从动齿轮10、11(双联齿轮)处于中间位置,与主动齿轮4、6没有接触,从动轴7与双联齿轮花键联接,双联齿轮可以带动从动轴,还可以在轴上移动。需要自动操作时,将定位机构推至a处,在换位拔叉12的作用下,双联齿轮向右移动,齿轮11与主动齿轮4啮合,齿轮4在电机驱动下转动而带动齿轮11转动,齿轮11通过花键带动从动轴转动,从而能实现自动操作。同理,将定位机构推至c处,就可以通过手摇的方式来驱动主动轴运转,来实现手动操作。
3 系统控制部分
检测开始打开系统电源,系统运行进行系统自检,如果自检没有通过指示灯闪烁提示哪个部分有问题,如果自检通过进入模式选择,手动模式和自动模式两种,在手动模式下采取手动进行机械操作,在自动模式下自动收放源功能使能,在输源过程中如果遇到砂砾或别的杂质而导致卡源现象,通过扭矩传感器,来实现报警和向电机发出指示停转。如果正常放源,在放源过程中,检测当前辐射量是否超标,超标进行报警提示,界面跳转到是否进行收源界面,提示工作人员进行如何操作,由工作人员进行选择,如果进行收源则系统收源,如果不进行收源,系统正常工作。辐射量如果在标准范围之内,LCD_12864显示且进入等待界面,等待按键信号输入或者上位机指令是否接到放源功能,收到指令进行收放源操作。
3.1 可控传输系统
平板上位机控制端通过串口RS232接口发送电机控制指令,由控制器控制驱动器驱动电机按照指定的位移进行定位。在机械传动机构中安装的动态扭矩传感器,来实现系统输源管遇阻检测功能,可以自动检测在放源时的卡死和阻力过大故障,及时报警并自动进行收源,机械传动装置通过电机驱动器和控制器STC12C5A60S2相连。
(1)辐射源自动收放功能
根据系统设置,可以实现延时启动后自动送源、定时曝光和自动收源操作。在整个工作过程中,不需要人为干预,自动完成上序步骤。由于系统能够实现自动收源、放源等工作,所以避免了人为干扰导致对人体的辐射伤害。
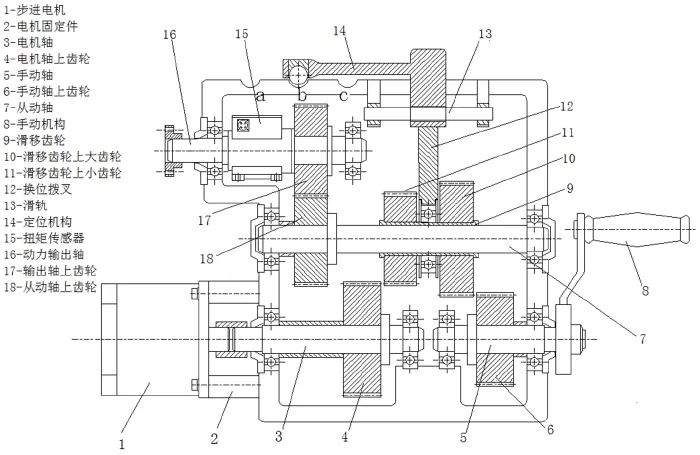
图2 系统机械传动机构
(2)送源过程遇阻检测报警和收源功能。
在送源过程中,由于输源管弯曲半径过小或局部堵塞等情况可能导致输源过程遇到很大的阻力。此时,系统不能暴力送源,否则可能导致源鞭受损等故障发生。因此,系统运用动态扭矩传感器设置在送源过程中实时监测源鞭遇阻故障。当发生遇阻故障时进行声光报警并自动收源。收源后,工作人员可处理故障,保证工作人员安全。
3.3 无线手环模块(远程遥控操作器)
手环远距离控制端如图6所示包括手环控制端液晶显示、手环信号收发按键、手环链、辐射量监控模块四部分构成,手环具有远距离遥控作用,在工作时可实现远距离控制本系统的运行状态,同时可实现在手动状态和故障状态下,远距离遥控对于放射源的放源和收源操作,报警指示功能,实现远距离安全操作。辐射量监控部分是利用单片机作为控制运算器,提高了系统集成度,减小了体积, 便携的γ 射线检测报警系统, 可以对辐射进行早期预警,有效的预防辐射扩散带来的潜在危害。
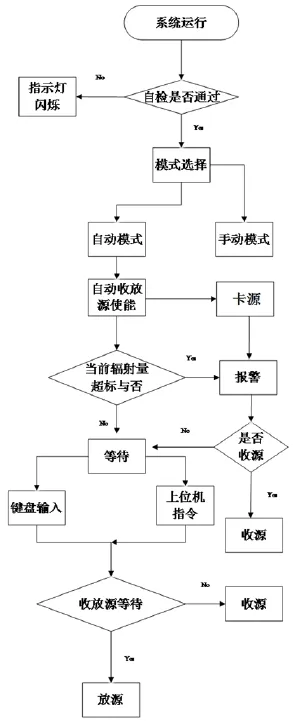
图3 系统流程图
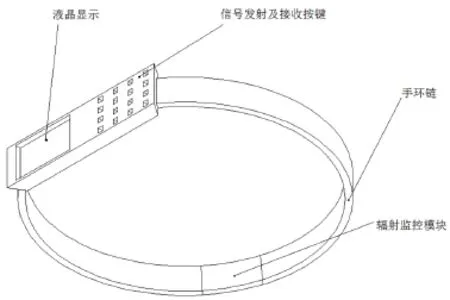
图4 无线遥控手环示意图
4 结束语
[1] 宋原.伽玛射线探伤仪失踪之谜[J].法治与社会,2007,(5):43-45.
[2] 王俊伟,王荣良.基于Q2406B的车载智能终端的研究与设计[J].微型电脑应用,2008,24(12):32-34.
[3] 屠岭.手摇攻丝机的设计[J].中国科技纵横,2010,(22):29.
[4] 李春海.塑壳断路器延时特性自动调校系统[D].河北工业大学,2011.
[5] 王艳娜,周欣悦,崔凌云等.基于单片机的X-γ射线检测报警系统的研究[J].电子设计工程,2015,(2):25-27.
[6] 张潇月,胡晓梅.X射线探伤室的辐射防护[J].中国新技术新产品,2014,(7):133-133.
Development of a Radiation Source Auto-transportation System for-Ray Radiographic Detector
Li Jiankui,Liu Feng,Deng Zilong,Li Weijun
(SchoolofMechanicalEngineering,LiaoningShihuaUniversity,Liaoning Fushun,113000,China)
The traditional-ray flaw detectorby using hand-operated is not only the period of manual operation is long,but also the injuryto people is more.Here provides the-ray detector automatic transmission source device,the device has high reliability and operational safety, and realizes the function of the transmission、limitation、remote control、timing radiographic inspection and alarm of-ray flaw detector radiation source.
-Ray Radiographic Facility;Radiation Source Auto-transportation ;Alarm
猜你喜欢
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
中学生数理化·七年级数学人教版(2019年12期)2019-05-21
作文大王·中高年级(2018年7期)2018-08-18
中成药(2017年3期)2017-05-17
小学生导刊(2017年17期)2017-05-17
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
中国塑料(2016年9期)2016-06-13
中国卒中杂志(2016年7期)2016-01-20
