基于车轮定位参数匹配的悬架优化方法研究
2015-12-03 06:29:34吴靖杰吴志成
车辆与动力技术 2015年2期
鲍 婕,侯 宇,王 伟,陈 堂,吴靖杰,吴志成
(1.北京理工大学机械与车辆学院,北京 100081;2.重庆大江信达车辆股份有限公司,重庆 401321)
操纵稳定性是汽车的重要使用性能之一,受到诸多因素的影响,其中悬架对于整车操纵稳定性有十分关键的作用.当车辆整体布置正式确定,整车参数无法改变的情况下,通过调整其悬架系统运动学规律是提高操纵稳定性较为切实可行的方法.文中提出了一种基于车轮外倾角与前束角运动学匹配的悬架优化设计方法.通过整车稳态和瞬态转向仿真试验验证,合理的车轮外倾角与前束角运动学匹配可以提高整车操纵稳定性.
1 外倾角与前束角匹配研究
为了保证汽车具有良好的转向和行驶特性,汽车设置有车轮外倾角、车轮前束角、主销内倾角与主销后倾角等定位参数.实践表明,汽车轮胎的磨损,除与轮胎自身质量、车轮动平衡等因素有关外,另一重要原因就是车轮外倾角、前束角大小匹配不合理[1].不正常的轮胎磨损反映了轮胎与地面接触的不正常,这种附着状态会使车辆转弯时产生滑移,影响操纵稳定性.文中从运动学出发,研究外倾角与前束角的合理匹配方法.只考虑前轮外倾时前轮运动,如图1和图2所示.
图1 左前轮仅有外倾时的运动后视图
图2 左前轮仅有外倾时的运动俯视图
图1中轮胎轴线延长线与地面交点为O,当前轮外倾角为β时,若无前轴的约束,前轮沿AA1所示轨迹运动.图2中R1为仅有外倾角作用时车轮纯滚动时转向半径,Re为轮胎半径.则有

从整车运动的角度分析仅考虑前束角影响时的前轮运动,如图3所示
图3 左前轮仅有前束角时的运动俯视图
受车轮前束角α的影响,向前滚动时左前轮向右偏离.左前轮的运动相当于以O1为中心,以R2为半径作圆周运动.R2为仅有前束角作用时车轮纯滚动转向半径,L为车辆的轴距.则有

分析左前轮外倾角和前束角同时作用时,车轮局部运动情况如图4所示.
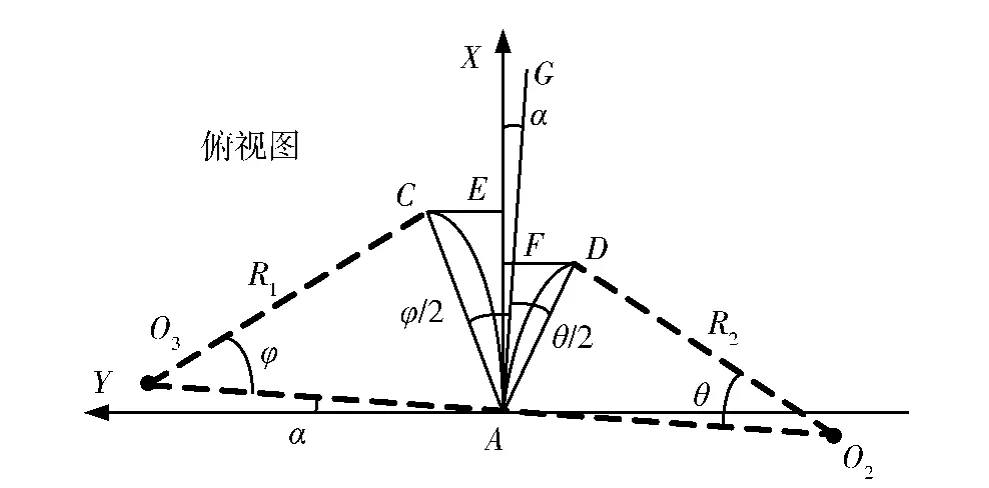
图4 左前轮外倾角和前束角同时作用时运动俯视图
X轴方向为车辆行驶方向,O3为左前轮只受外倾角作用时车轮滚锥运动的中心,O2为左前轮只受前束角作用时车轮滚锥运动的中心,AG为轮胎实际滚动的方向,A为轮胎接地印迹的中点.假定车辆前轮外倾角和前束角保持不变.当前轮运动时,只考虑外倾角的影响,前轮在某一瞬时 (t内滚动的距离为弧长AC;只考虑前束角的影响,前轮在同一瞬间 (t内滚动的距离为弧长AD.然而由于外倾角与前束角的互相制约,车轮在 (t时间内滚动时既没有到达C点也没有到达D点,而是分别从C、D点滑到了E、F点.因此当外倾角有合理的前束角与其匹配时,向量|AC|与向量|AD|的横向分量大小近似相等方向相反,此时轮胎的侧滑量最小.图中φ表示外倾角引起的弧AC方向滚动的角度;θ表示前束角引起的弧AD方向滚动的角度.此时有下列关系:,其中又因为,,再代入公式 (1)、(2),可得:

由于以上角度都很小,上式可简化为

又因相同时间内车轮在外倾角与前束角分别作用下滚动的距离相等,有R1φ=R2θ.
由于轮胎侧偏只在轮胎接地部分产生作用,因此弧长AC与弧长AD的长度可近似界定在轮胎接地印迹长度l内[2],故弧长AC与弧长AD的最大长度为轮胎接地印迹长度的一半[3],即

再由式 (1)、(2)、(3)、(4)、(5)可得:sinβ =.由于前束角值一般在2°以内[4],简化上式得

即合理的车轮定位匹配原则为前束角与外倾角的正弦值成正比,其系数与轴距、轮胎接地印迹长度及轮胎半径相关.
2 基于ADAMS的某越野车悬架优化
某越野车悬架的车轮外倾角的变化规律已经确定,只能通过调整前束角的变化来达到外倾角与前束角的匹配.按照上节推算的匹配关系,合理的前束角受到接地印迹长度的影响[5],根据相关试验轮胎接地印迹可根据下式计算[6]

式中:D为轮胎的外径,cm;Δr为轮胎变形,cm.
轮胎变形 Δr的经验公式[4]为

式中:C是与轮胎设计有关的参数,斜交胎C=1.15,子午线轮胎 C=1.5;K=15×10-3×B+0.42;Q为轮胎载荷,kPa;B为轮胎宽度,cm;D为轮胎的外径,cm;p为轮胎内气压,kPa·cm-2.
该车轮胎型号为315/80R22.5,主要参数如表1所示.
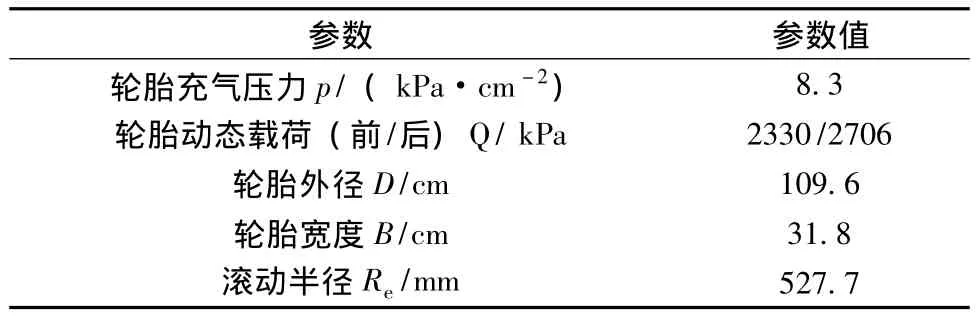
表1 轮胎参数
根据表1的参数可求前、后悬架的车轮外倾角βf、βr与前束角 αf、αr匹配公式为

在ADAMS中建立悬架模型,进行轮跳仿真可以得到前、后轮外倾角的变化规律.根据外倾角与前束角匹配原则计算前束角优化目标值,通过优化转向横拉杆位置[7-8],得到优化前后前悬架的前束角变化曲线如图5所示,优化前后后悬架的前束角如图6所示.
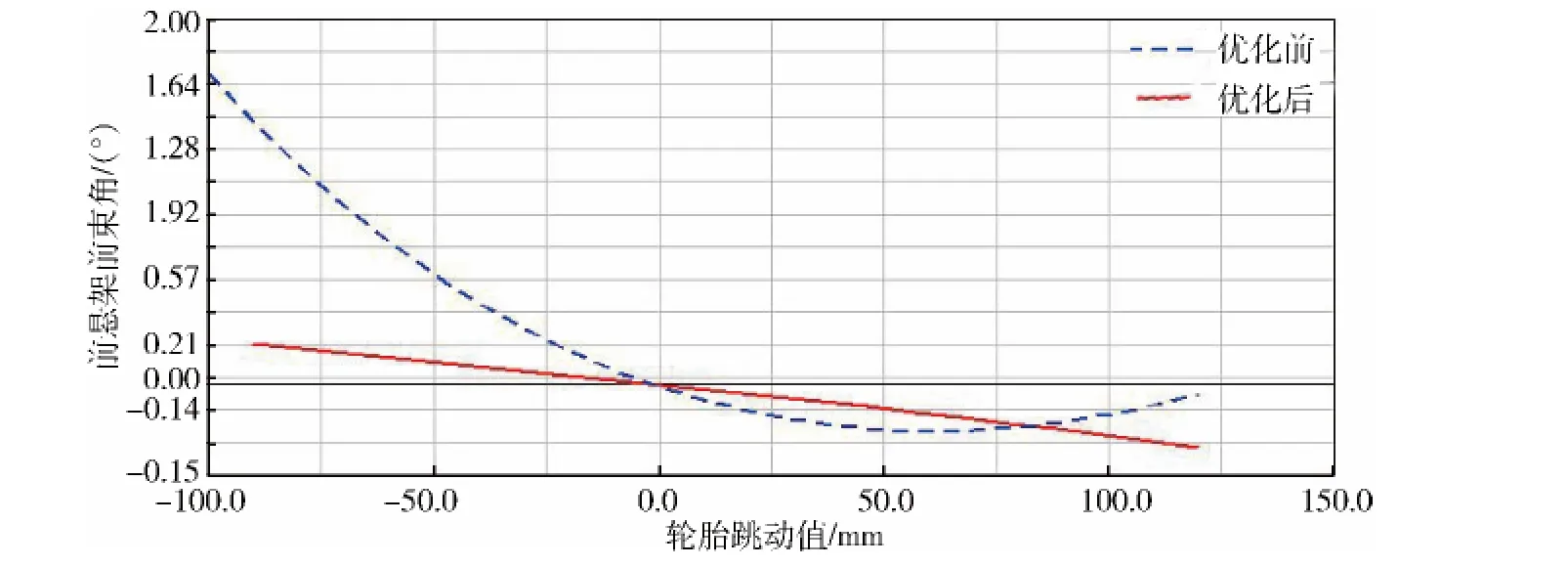
图5 优化前后前悬架前束角随轮跳变化
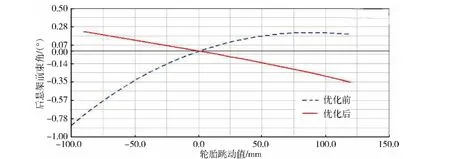
图6 优化前后的后悬架前束角随轮跳变化曲线
可以看出:优化前,悬架跳动行程为-100~120 mm,前轮前束角变化范围为:1.55~-0.20°,后轮前束角变化范围为:-0.84~0.29°.优化后,前轮前束角变化趋势不变,但范围减小为:0.22~-0.35°;后轮前束角变化趋势与优化前相反,变成由正前束向负前束变化变化,范围也减小为:0.23~-0.37°.
3 整车操纵稳定性对比
为了验证优化后的车轮外倾角与前束角对整车操纵稳定性的影响,在ADAMS中将优化前后的悬架加入到整车装配中,对整车模型进行典型操纵稳定性仿真,可以得到优化前后部分操纵稳定性参数的对比曲线.
3.1 角阶跃仿真试验
角阶跃输入试验是为了测定汽车对转向盘转角输入时的瞬态响应.参照国标进行仿真试验.汽车满载状态以80 km/h的速度直线行驶2秒时迅速将方向盘从零转到所需角度,使侧向加速度达到2 m/s2,然后固定方向盘不动,直至汽车再次达到稳态.试验过程中车身横摆角速度变化如图7所示.

图7 角阶跃仿真试验横摆角速度对比曲线
可以看出,优化后的车辆横摆角速度有了明显的下降,说明在相同的角阶跃输入下,车身摆动的速率更小;优化后的车辆响应时间更短,说明车辆对角阶跃的响应速度更快.
3.2 稳态回转仿真试验
稳态回转特性是表征汽车操纵稳定性的一个重要的时域响应.文中仿真试验汽车首先以最低稳定车速沿半径为20 m的圆周稳定行驶,然后固定转向盘不动,汽车均匀地加速直至汽车的侧向加速度达到6.5 m/s2为止.仿真过程中车身侧倾角变化规律如图8所示.
可以看出,优化后的车辆的侧倾角相比优化前有明显的减小,说明车身发生侧向失稳的概率降低,发生侧翻的可能性也降低了;侧倾角随着车速的增大而增大,符合车辆运动规律.
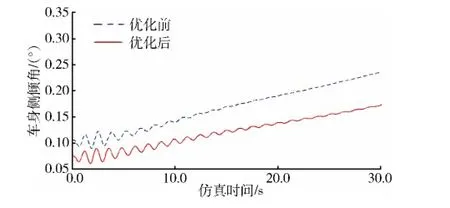
图8 稳态回转仿真试验车身侧倾角对比曲线
4 结论
1)合理的车轮定位匹配原则为前束角与外倾角的正弦值成正比,其系数与轴距、轮胎接地印迹长度及轮胎半径相关.
2)仿真试验结果显示,优化后整车对角阶跃转向的响应速度更快,稳态回转过程中稳定性更高,这表明合理匹配车轮外倾角与前束角可以提高整车操纵稳定性.
[1]安部正人.汽车的运动与操纵 [M].陈辛波.译.北京:机械工业出版社,1998.
[2]Gim G,Nikravesh P E. An analytical model of pneumatic tires for vehicle dynamic simulations[J].International Journal of Vehicle Design,1990,11(6):589-618.
[3]魏道高,陈雪琴,胡能俊,等.车辆前轮前束值与外倾角合理匹配算法的商讨 [J].农业工程学报,2003,19(6):139-142.
[4]Komandi G.The determination of the deflection,contact area,dimensions,and load carrying capacity for driven pneumatic tires operating on concrete pavement[J].Journal of Terra me chanics,1976,13(1):15-20.
[5]安相壁,李树珉.车轮定位与轮胎磨损关系分析[J].汽车研究与开发,2001(2):30-32.
[6]王伯良,周建立,赵 波,等.拖拉机前轮前束设计计算方法的研究 [J].农业工程学报,1995,11(1):89-94.
[7]曹立波,孙彦玮,樊慎铭,等.大客车前轮异常磨损机理及改进措施的研究 [J].湖南大学学报,1998,25(6):37-42.
[8]庄继德.汽车轮胎学 [M].北京:北京理工大学出版社,1996.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19 02:48:08
装备制造技术(2021年4期)2021-08-05 07:39:40
北京汽车(2016年6期)2016-10-13 17:07:50
红蜻蜓·低年级(2015年11期)2016-02-02 11:04:45
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
噪声与振动控制(2015年4期)2015-01-01 07:08:09
农机使用与维修(2014年11期)2014-11-18 01:32:07
中国自行车·骑行风尚(2014年4期)2014-10-10 05:00:14
客车技术与研究(2014年1期)2014-03-20 14:34:48
汽车维护与修理(2014年10期)2014-02-28 12:15:00