
基于轮廓方向特征的头部特征识别
2015-12-02 02:43:14黄杰贤黄志平杨冬涛欧阳玉平
电视技术 2015年12期
黄杰贤,黄志平,杨冬涛,欧阳玉平
(1.广东嘉应学院 电子信息工程学院,广东 梅州 514015;2.广东振声科技股份有限公司,广东 梅州 514000;3.华南农业大学 工程学院,广东 广州 510642)
危险作业场所一般指生产易燃、易爆或高腐蚀性产品的生产场所,该类商品的特殊性与高危性使其与公共安全密切相关,直接影响到社会稳定和千家万户的安全。国家有关安全生产监管部门对该类型的生产场所的作业人数进行严格的限定——定员监控。当前政府对企业的定员监控仍停留在对人数进行现场清点,辅助以定期检查、不间断抽查的方法来获取在岗在职人员数据信息。这就存在以下弊端:1)可靠性不高,容易产生漏洞;2)准确率低,无法避免因人为疏忽导致的错误;3)实时性差,信息汇总与上报存在时间差,导致监管工作迟滞。可见,采用传统方法已难以满足现代企业安全生产的发展要求。这就迫切要求发展一套全自动、智能化的监测方法,确保对工作人员的监控与管理。
当前,通过机器视觉技术对人头进行检测、识别、跟踪可成功地对人流进行统计,该技术作为研究热点得到科研,工程人员的重视[1-2]。常用的人头检测方法可分为分为双目视觉与单目视觉两大类。双目视觉是目前最准确的人头检测方法,采用双目视觉不仅可获取人头的特征信息[3],也可获取人头的深度信息,但是双目视觉对硬件条件要求较高:两个摄像头——增加成本;计算机要求同时处理两幅图像——计算效率不高;使用之前两个摄像头要求做好标定工作——增加了使用的复杂度。鉴于以上不足,大部分场合都采取单目视觉的人头检测方法,目前比较常用的人头检测算法主要有:颜色法、形态学分法、轮廓分析法、分类器设计法与人体特征法。采用颜色识别人头的方法是最简单,最直观的方法,但也是准确率最低的方法。在使用颜色特征检测人头时,配合纹理特征或者形态特征提高检测准确率。例如卢等人采用头发颜色信息与纹理信息实现对人头的识别[4];赵等人通过提取HSI空间的颜色特征,并配合数学形态学方法提高人头检测准确率[5]。轮廓特征是重要的特征,Kulrapat建立了肩部与头部的模型对人员进行识别与跟踪[6];Jin采用椭圆拟合的方法对人头进行匹配[7],于通过霍夫变换法非常有效地对人的头部区域进行提取[8],张通过轮廓曲率判断人头目标[9],而在实际的检测过程中,背景、衣服与头部的颜色特征相似将造成头部轮廓的可区分性下降使得轮廓无法提取。文嘉俊等使用AdaBoost算法学习训练人头检测分类器,然后通过过线跟踪的方法统计进出口人流量[10]。牛胜石结合Ada⁃Boost算法和支持向量机(Support Vector Machine,SVM)训练人头检测分类器[11];但是该算法的离线训练过程繁杂,要求大量学习样品以及选取最优的权值参数才可取得较高的准确率,这就限制了此种算法的推广应用。人体特征法主要通过对人的骨架特征进行匹配进而判断出人头位置,不足之处在于该种检测方式的成像角度不可避免地产生遮挡问题[12]。为了更准确高效地对人头进行识别与跟踪,本文首先对移动目标进行分割,定义了方向熵与目标置信度函数对人头进行提取,最终通过运动目标的运动轨迹实现定员管理。
1 运动目标的分割
背景均值分割是一种简单、快速、有效的移动目标提取方法,在监控场景无监控目标的情况下首先获取背景图像B(x,y)为

式中:Ii(x,y)为第i帧图像,背景图像随着时间改变不断地根据式(1)进行更新。将运动目标从图像背景中进行分割依据下式
式中:Tn表示分割阈值,根据帧之间的3倍标准差获取(如式(3));Tm为头发颜色灰度阈值。采用式(2)对移动目标(如图1a)进行分割,得到如图1b所示的分割结果。
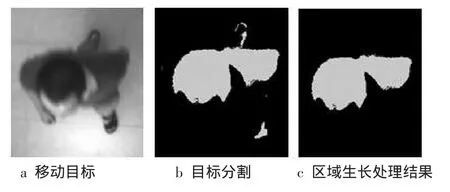
图1 目标分割实验
从图1b可观测得到,图像分割的内容不仅包括头部区域,也包含其他杂点。为了避免这些杂点对后续的图像处理造成干扰,采用图像区域生长方法对关键的区域进行筛选,具体步骤如下:
步骤1,在对运动目标分割的基础上随机选择种子点;
步骤2,将种子点相邻的、具有相同性质的像素点(基于式(2)提取的像素点)进行合并,新合并的像素点作为新的种子点重复步骤2的操作直至所有符合条件的区域合并完成;
步骤3,观测该区域的面积区域,设置面积阈值(本实验选取人头面积大小的值为阈值)得到移动目标最终处理结果(如图1c)。
从图1c的图像处理结果观测得到,非头部区域的杂点被滤除,包含有头部的图像区域仍需做进一步图像分析实现头部目标的正确提取。
2 基于方向熵函数的圆轮廓提取
本节首先构建方向熵函数以获取圆形目标的轮廓位置信息与方向信息[13-14]。在整幅图像中,某像素点的纹理梯度数学表达式如式(4)所示,对应的纹理梯度方向角度计算公式定义为
将θ划分不同的角度级i,i=1,2,…,Nθ。在本实验中,当 θ∈ (0°,10°)时,i=1 ;当 θ∈ (10°,20°)时 i=2 ,…,当θ∈(80°,90°)时,Nθ=9为最高角度级。分别从整幅图像中攫取R×S的图像,定义统计函数 fθ(i)(如式(6)所示),该公式表示为落入角度级为i的像素统计量,在整幅图像中,像素落入i角度级区间的概率Pθ(i)为

定义方向熵为

将式(7)对图2a圆目标进行图像处理,从图2b实验结果得到,边缘的方向熵值明显低于非边缘区域,图2c为设置方向熵阈值对边缘的提取,边缘区域的角度级也呈集中分布(如图2c),轮廓点的方向亦可得以确定。
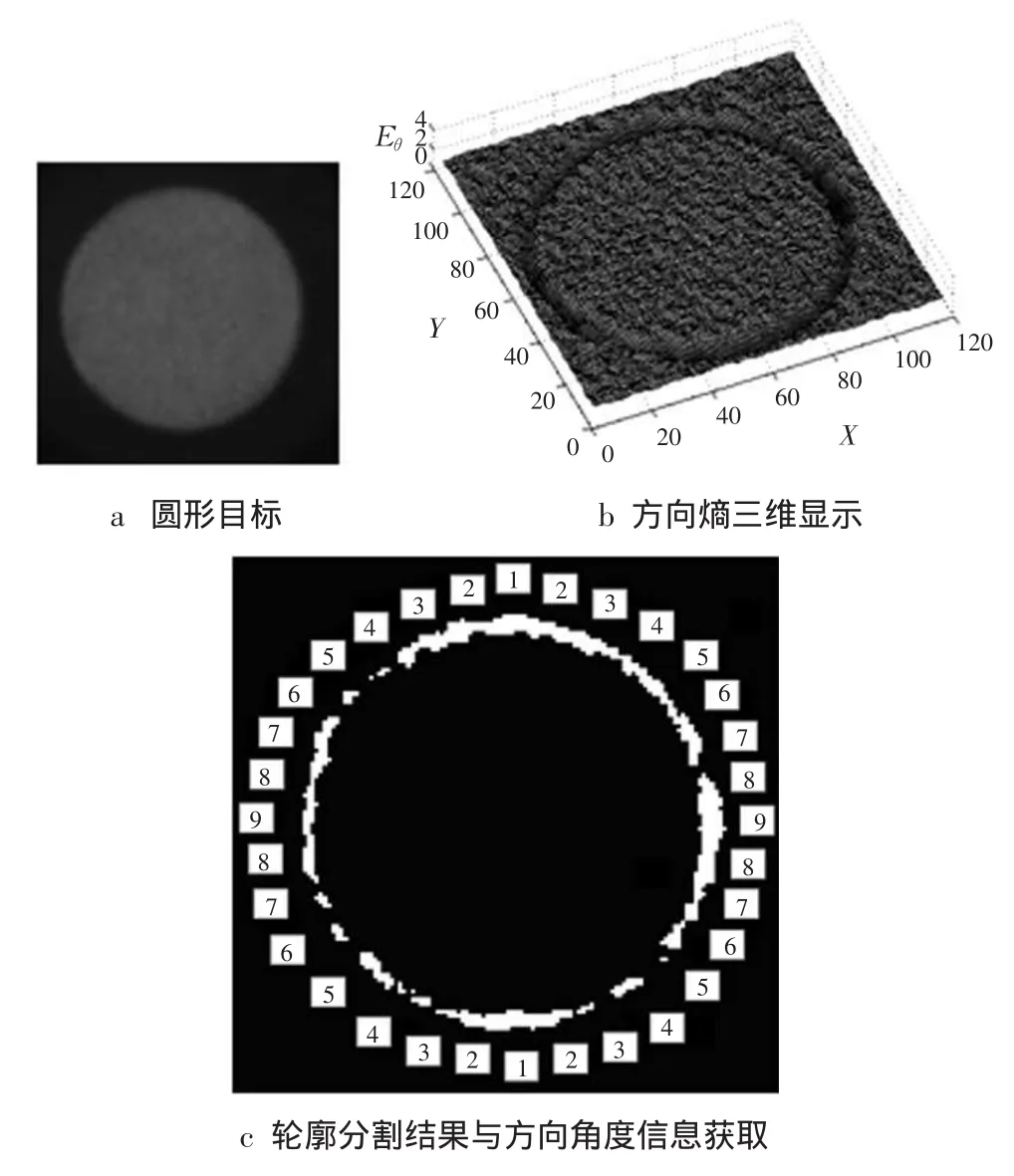
图2 基于方向熵的轮廓特征信息提取
因此,图2c与标准圆在位置上重合,在角度上相等的像素点可判定为可信的轮廓点。图3为对图2圆目标的搜索过程,图3a~图3d搜索匹配的准确率不断提高,符合条件轮廓点也不断增加(如图3e表示),因此,根据轮廓点数量最大的原则可实现对目标的匹配。图4为最终的筛选结果及实现最佳匹配。
3 轮廓筛选与头部定位
根据上文实验结果可以得到,使用式(5)不仅可以获取边缘的位置信息,也可以获取轮廓角度信息。因此,使用轮廓及其方向角度级二元信息使得搜索圆目标准确性、可靠性更高。将其应用于人体头部特征的定位的基本思路与步骤为:
步骤1,采用式(7)对图像进行处理(如图5b、图6b所示);

图3 轮廓搜索
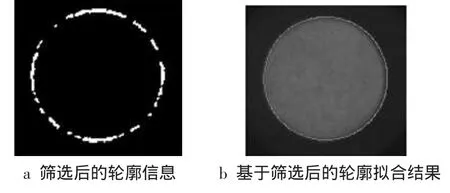
图4 目标匹配
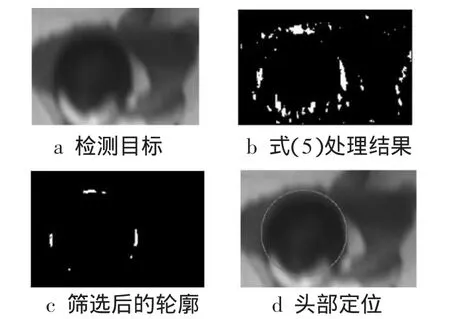
图5 头部定位的实验1
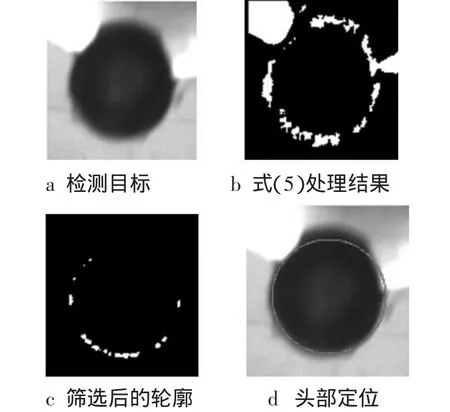
图6 头部定位实验2
步骤2,基于标准圆的轮廓与角度信息对经式(5)处理后的图像作进行轮廓筛选(如图5c、图6c所示);
步骤3,根据局部轮廓特征实现对人头定位(如图5d、图6d所示)。
4 基于弧长置信度函数的多目标定位
前文的实验验证了基于轮廓方向特征对于提取人头区域有效性。但在现实的场景中存在多个人员目标同时运动的情况,鉴于人头尺寸大小不一,仍需对图像做进一步分析与处理以实现在同一场景中同时提取多个目标。人头是类圆型目标,轮廓相当于弧长。在相同半径条件下,弧长越长越更接近圆。基于该特点,建立弧长置信度函数对人头进行定位,定义如下


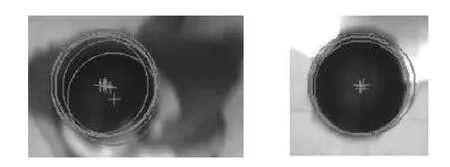
图7 人头目标的搜索
在图7中搜索的结果中,每个圆形区域都包含有人的头部区域,验证了基于弧长置信函数搜索方法的有效性。从所有搜索的候选区域中选取弧长置信度最高的区域确立人的头部区域(如图8所示)。
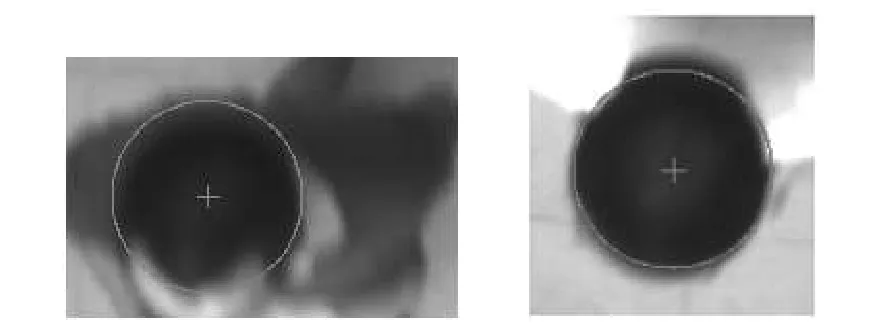
图8 头部区域的确立
将该方法应用于多个人员目标定位情景中,实验结果如图9所示。

图9 多目标人头定位
5 人头目标跟踪
实现对人头区域的定位工作后,本节从:1)相邻帧图像的人头区域重合;2)基于连续相邻帧图像人头运动的预测两方面对人头目标进行跟踪[15-17]。对相邻帧图像进行人头定位,图像之间的人头在位置上存在重叠区域(如图10所示),因此可判断人头从坐标(x1,y1)移动至坐标(xn,yn)。
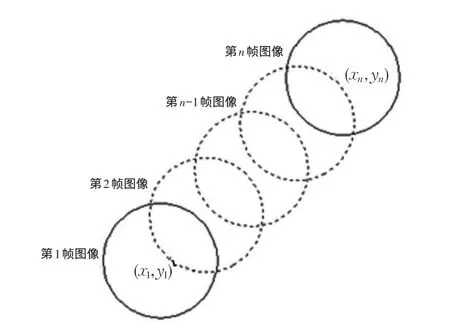
图10 目标移动
针对移动目标的搜索与跟踪过程中,为了更准确、高效地对移动目标进行搜索与跟踪,可基于前几帧图像与当前图像的目标位置对下一帧图像目标的位置进行预测。本文选取3帧图像:当前帧(第k帧),前1帧(k-1帧)与前2帧(k-2帧)基于牛顿插值法建立预测函数定义如下
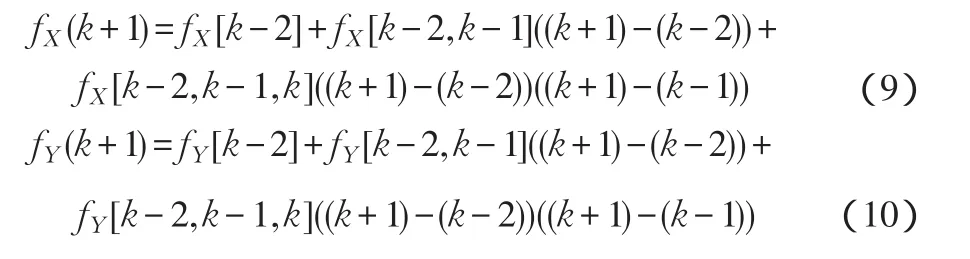
式中:fX(k),fY(k)分别为第k帧(当前帧)图像目标的X坐标值与Y坐标值。对目标进行跟踪时,根据预测函数对目标的坐标位置进行预判,从而缩小目标搜索范围,提高了搜索效率与准确率。图11为目标的跟踪及其运动轨迹线。
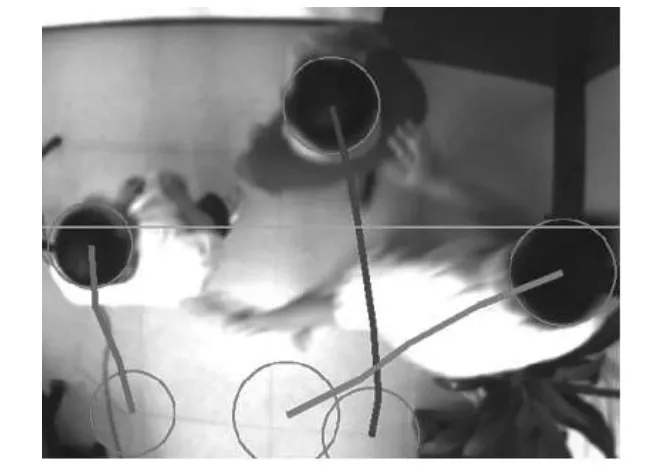
图11 多目标跟踪及其运动轨迹
在图11中,每个人头目标对应着一对圆,分别表示目标的起始区域与终点区域,该对圆心的坐标分别为起始点坐标与终点坐标,之间的连线则是目标的运动轨迹。图11中的中间线为计数触发线,当目标轨迹线由下向上越过中间线则表示该目标“进入”;当目标轨迹从上往下穿过中间线则表示“离开”。因此基于机器视觉技术的定员管理算法可概括为:1)采用图像处理技术确立移动目标;2)基于方向熵实现对圆轮廓进行筛选;3)基于圆轮廓实现对人头的识别;4)对人头目标进行跟踪,最终实现对进出人员的实时监控与统计。流程图如图12所示。
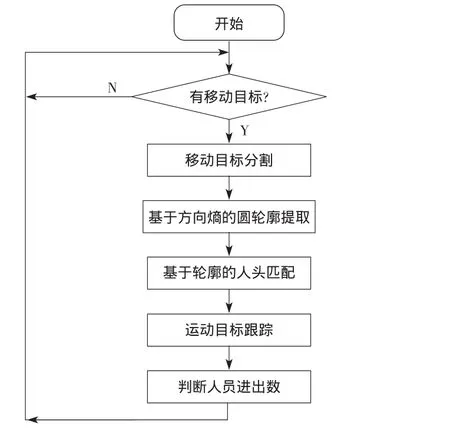
图12 流程图
为了测试该算法的性能,系统对视野内的移动目标进行跟踪,对“进入”与“离开”的人数进行统计,实验结果如表1所示。

表1 目标跟踪统计 人
6 实验对比分析
表2中,选取237个人头样品并采用不同的算法进行图像处理,通过观测“准确率”与“算法时间”两个指标对算法性能进行对比分析。实验中测试视频抓取的每帧图像大小为640×480,在双核处理器 2 Gbyte内存PC机的硬件平台,VC2008软件平台上运行。
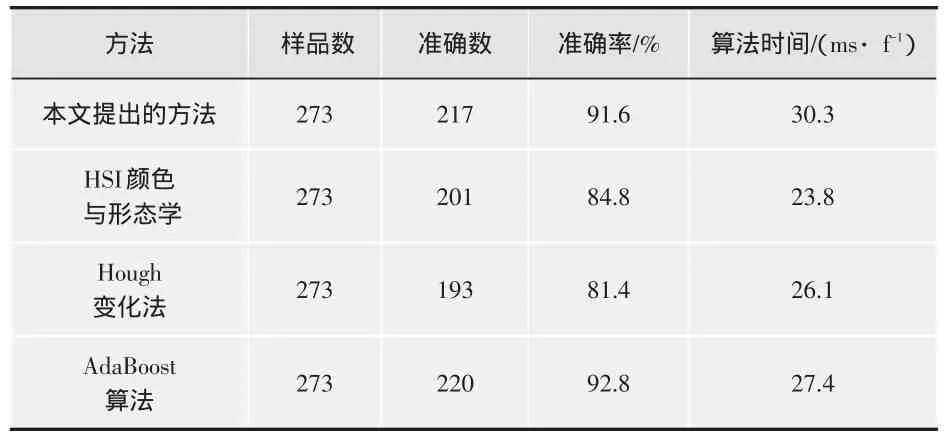
表2 人头识别对比实验
从表2的算法处理时间观测得到:尽管“HSI颜色与形态学”与“霍夫变换法”是比较提取人头识别的有效方法,但对人头与背景的对比度要求较高,但人头与背景的颜色相近时,算法准确率下降。AdaBoost算法虽然在效率与准确率上有优势,但达到高效、高准确率的效果有两个前提条件:1)选取大量样品让系统进行学习,当应用场景变化,或者光照条件发生明显变化时,要求系统重新学习;2)在对样品学习的基础上,要求工作人员调整好最优的参数。以上两点工作冗余、繁琐、复杂。使得该算法不具通用性,推广应用难度大。
7 总结与展望
本文提出的算法在存在干扰的情况下实现对类圆形目标的轮廓进行提取,并基于轮廓实现对类圆目标的匹配。将该算法应用于广东振声科技股份有限公司的工业炸药生产作业场所的定员管理为例,对“进入”,“离开”生产作业场所的人数进行智能识别与统计,有效提升了企业的管理、监控、安全水平。平均时间约为30 ms/f(毫秒/帧),完全可以满足实时检测的要求,准确率达到90%以上。当工人进入生产场时,着装佩戴的工作帽形态,颜色(灰色)具有一致性,本文的算法也适用于戴工作帽情况下。但该研究工作仍然存在不足之处:1)仍需进一步提高准确率;2)当行人携带与人头大小的圆形物品通过时,算法会将圆形物品错检为人头,从而导致计数错误。如何克服以上问题,提高检测准确率,则有待进一步深入研究。
[1]BENABBAS Y,IHADDADENE N,YAHIAOUI T,et al.Spatiotemporal optical flow analysis for people counting[C]//Proc.of 7th IEEE International Conference on Advanced Video and Sig⁃nal Based Surveillance.Boston,USA:IEEE Press,2010:212-217.
[2]JAIJING K,KAEWTRAKULPONG P,SIDDHICHAI S.Object de⁃tection and modeling algorithm for automatic visual people count⁃ing system[C]//Proc.6th International Conference on Electrical Engineering/Electronic,Computer,Telecommunication and Infor⁃mation Technology.[S.l.]:IEEE Press,2009:1062-1065.
[3] 顾骋,钱惟贤,陈钱,等.基于双目立体视觉的快速人头检测方法[J].中国激光,2014,41(1):1-6.
[4] LU Huchuan,ZHANG Ruijuan,CHEN Yenwei.Head detection and tracking by mean-shift and kalman fiter[C]//Proc.3rd Interna⁃tional Conference on Innovative Computing Information and Con⁃trol.[S.l.]:IEEE Press,2008:357-360.
[5] 赵军伟,侯清涛,李金屏,等.基于数学形态学和HSI颜色空间的人头检测[J].山东大学学报,2013,43(2):6-10.
[6]JAIJING K,KAEWTRAKULPONG P,SIDDHICHAI S.Object de⁃tection and modeling algorithm for automatic visual people count⁃ing system[C]//Proc.6th International Conference on Electrical Engineering/Electronic,Computer,Telecommunication and Infor⁃mation Technology.[S.l.]:IEEE Press,2009:1062-1065.
[7] JIN Yonggang,MOKHTARIAN F.Towards robust head tracking by particles[C]//Proc.IEEE International Conference on Image Processing.[S.l.]:IEEE Press,2005:864-867.
[8] 于海宾,刘敬彪,刘济林.用于行人头部特征提取的目标区域匹配方法[J].中国图像图形学报,2009,14(3):482-488.
[9] 张海洋,陈国龙,李现伟.基于曲率尺度空间的人头检测方法研究[J].计算机工程与应用,2012,48(14):195-197.
[10] 文嘉俊,徐勇.基于AdaBoost和帧间特征的人数统计[J].中国图象图形学报,2011,16(9):1729-1735.
[11] 牛胜石,毛晓晖,侯建华,等.基于AdaBoost和SVM的人头实时检测[J].微型机与应用,2010(13):33-36.
[12] 夏菁菁,高琳,范勇,等.基于骨架特征的人数统计[J].计算机应用,2014,34(2):585-588.
[13] YE Feng,LI Di,HUANG Jiexian,et al.Flaw detection on FPC solder surface[J].Circuit World,2012,38(3):142-152.
[14] 杨冬涛,黄杰贤,龚昌来,等.基于轮廓方向特征的柚子果形检测研究[J].激光与红外,2013,43(6):712-716.
[15]CONG Yong,GONG Haifeng,ZHU Songchun,et al.Flow mosa⁃icking:real-time pedestrian counting without scene-specific learning[C]//Proc.IEEE Conference on Computer Vision and Pat⁃tern Recognition (CVPR)2009.Miami,USA:IEEE Press,2009:1093-1100.
[16] ANTIC B,LETIC D,CULIBRK D,et al.K-means based seg⁃mentation for realtime zenithal people counting[C]//Proc.16th IEEE International Conference on Image Processing(ICIP).Cai⁃ro,Egypt:IEEE Press,2009:2565-2568.
[17] DINESH K V P,TESSAMMA T.Performance study of an im⁃proved legendre moment descriptor as region-based shape de⁃scriptor[J].Pattern Recognition and Image Analysis,2008(1):23-29.
猜你喜欢
课堂内外·小学版(低年级)(2023年6期)2023-04-29 00:44:03
小雪花·初中高分作文(2022年5期)2022-07-23 15:00:44
基层中医药(2021年1期)2021-07-22 06:56:44
军事文摘(2020年22期)2021-01-04 02:16:38
制造技术与机床(2019年11期)2019-12-04 05:50:54
知识窗(2019年4期)2019-04-26 03:16:02
百花洲(2018年1期)2018-02-07 16:33:02
天津医科大学学报(2015年2期)2015-12-22 09:24:34
计算机工程(2015年4期)2015-07-05 08:27:39
早期教育(美术教育)(2010年7期)2010-06-28 07:41:12
