高精度气浮支承转动平台结构设计及精度测试
2015-12-02 07:30:13肖松文韩庆夫周爱玉
核技术 2015年3期
肖松文 孙 远 韩庆夫,3 周爱玉,3 朱 涛
1(中国科学院高能物理研究所 东莞分部 东莞 523803)
2(东莞中子科学中心 东莞 523808)
3(北京同步辐射实验室 北京 100049)
4(中国科学院物理研究所 北京 100190)
高精度气浮支承转动平台结构设计及精度测试
肖松文1,2孙 远1,2韩庆夫1,2,3周爱玉1,2,3朱 涛4
1(中国科学院高能物理研究所 东莞分部 东莞 523803)
2(东莞中子科学中心 东莞 523808)
3(北京同步辐射实验室 北京 100049)
4(中国科学院物理研究所 北京 100190)
针对中国散裂中子源(Chinese Spallation Neutron Source, CSNS)多功能反射谱仪反射臂对重负载、大行程及高精度的运动要求,采用气浮支承加摩擦轮驱动的组合结构。先通过气浮支承实现反射臂与地面之间无接触无摩擦,再通过摩擦轮驱动实现反射臂绕着样品台中心进行精确定位运动。为验证该方案的可行性进行气浮支承转动平台样机的研制,并通过对气浮支承转动平台的精度测试得知在全行程范围内其单向重复定位精度为0.00031°,单向定位精度为0.0009°。试验结果表明气浮支承加摩擦轮驱动的结构能够满足多功能反射谱仪反射臂的运动要求。
气浮支承,摩擦轮驱动,精度测试
中子反射技术是通过测量界面薄膜材料对中子的反射分析获知界面处0.5–500nm尺度内结构成分等信息的先进材料表征技术,反射中子和X光一样是研究各类薄膜材料结构特性的有力工具[1–2]。在目前的中国散裂中子源工程(Chinese Spallation Neutron Source, CSNS)[3–4]建设中,多功能反射谱仪是首期建设的三条谱仪之一。在反射谱仪结构设计中,入射中子经过两组狭缝准直之后首先打到竖直放置的薄膜样品表面,薄膜样品放置在一个六维可调样品台上,样品中心距离地面高度1300mm,通过六维可调样品台来调节薄膜样品与入射中子之间的入射角,入射中子被薄膜样品表面反射之后形成反射中子束。在六维可调样品台后设置有一反射臂,反射臂上放置有一台位置灵敏中子探测器,探测器距离样品中心2000mm,为了实现探测器对反射中子的探测,反射臂必须绕着样品中心旋转到相应的反射角位置。目前典型的中子反射及衍射实验对于旋转角度的定位精度要求达到0.001°。考虑到多样化的实验需求,中子入射角设计范围为0°–65°,相对应的反射臂旋转所需能实现的反射角为0°–130°,反射臂设计长宽高分别为1750mm×1000mm× 800mm,重量为1200kg。
目前采用传统的圆弧导轨副来支撑反射臂的结构很难满足如此重负载、大行程及高精度的运动要求,因为导轨副属于刚性接触,导轨副之间不可避免会产生摩擦,而且刚性结构无法有效阻隔机械振动[5]。为了满足反射臂对重负载、大行程及高精度的运动要求,设计采用非接触式的气浮支撑的结构方式来取代机械接触式的导轨副结构,从而有效避免刚性接触所带来的摩擦及振动传递等缺点[6–7]。
目前国内对于气浮技术的应用多用于负载很轻行程较短的超精密气浮定位平台[5–7],而对于重负载、大行程及高精度的气浮支承平台的应用还没有。因此我们针对多功能反射谱仪反射臂的应用要求设计并制造了一套气浮支承转动平台样机。本文将详细介绍气浮支承转动平台样机的结构,并通过样机的精度测试来验证气浮支承结构的旋转精度。
1 气浮支承转动平台结构设计
1.1 气浮台结构设计
气浮支承结构采用气体作为润滑介质,通过在气浮支承底面和支承平面之间形成一层气体薄膜来实现支承和润滑的功能[5]。本设计中采用德国Aerolas公司所提供的ø160mm圆形气浮垫,考虑到三点支撑的稳定性,在正六边形试验平台的三边各分布一组气浮垫。每组气浮垫结构如图1所示,在连接板左右各安装一球头螺杆,球头螺杆的球头安装到左右两个气浮垫顶部的球头槽内,连接板中间安装有一个转轴,转轴的另一端安装在安装板上,安装板通过螺钉固定在试验平台底部。这种双球头支撑加中间转轴连接的双气浮垫结构允许左右气浮垫与地面有不同角度的倾斜,能够更好地适应地面的不平整性以及负载的波动。

图1 双气浮垫组合结构Fig.1 Schematic diagram of composite structure of two air bearings.
气浮垫对支撑平面的平面度要求很高,本设计中气浮台将放置在一块1000mm×2000mm的花岗岩平台上,单个气浮垫设计气隙高度为30μm,花岗岩平台的平面度设计要求为5μm (300mm×300mm面积内)。因此当气浮垫工作时,气浮垫的气隙高度要大于花岗岩平面的平面度,此时气浮垫与花岗岩平台之间不接触无摩擦,花岗岩平台设计采用花岗岩拼接再研磨工艺制造。气浮台结构示意图如图2所示。

图2 气浮台结构示意图Fig.2 Schematic diagram of air floating stage.
1.2 转动结构设计
样品台底座设置在花岗岩平台一侧,气浮台工作时需要绕着样品台底座中心旋转,因此在样品台底座处安装一个交叉滚柱轴环,轴环的内圈固定,而外圈则通过一块厚2mm、宽200mm的薄钢板与放置在花岗岩平台上的气浮台固定相连。使用薄钢板的原因是薄钢板的正面受力时很容易弯曲,而侧面受力时变形很小,因此薄钢板的使用既能够保证气浮台工作时完全浮起也能保证气浮台始终绕着样品中心旋转。
在气浮台一侧设置有一个摩擦轮,摩擦轮使用摩擦系数高且耐磨的聚氨酯材料,摩擦轮与花岗岩平台之间有预压,气浮垫工作时,气浮台完全浮起,此时通过步进电机驱动摩擦轮转动,再通过摩擦轮与花岗岩台面之间的静摩擦力带动气浮台绕着样品中心转动。
气浮支承转动平台样机整体结构见图3所示。

图3 气浮支承转动平台结构Fig.3 Schematic diagram of rotation stage with air bearing support structure.
1.3 运动控制系统结构设计
气浮支撑转动平台控制系统结构如图4所示,使用美国DELTA TAU公司的UMAC运动控制器作为核心控制部件,UMAC运动控制器输出指令给电机驱动器,通过电机驱动器输出脉冲来控制步进电机的运转,在样品台底座处设置有一雷尼绍绝对值圆光栅作为气浮台的转角测量和反馈部件。通过绝对值圆光栅实时反馈气浮台的旋转角度给UMAC运动控制器,从而形成气浮支撑转动平台的闭环运动控制,通过位置开关限位保护气浮台的运动行程。

图4 气浮支承转动平台控制系统结构Fig.4 Schematic diagram of rotation stage with air bearing support control structure.
1.4 气浮支承转动平台转动精度理论分析
气浮台的驱动部件为摩擦轮,摩擦轮的最小步进值将直接影响到气浮台的旋转定位精度。 摩擦轮使用的电机为五相步进电机,五相步进电机的最小步距角为E=0.02°,摩擦轮直径D=120mm,则摩擦轮的最小步进值为:

摩擦轮设计时距离样品中心距离为R=1100mm,则气浮台转动的最小步进角为:

考虑到电机驱动器20倍的电子细分,则气浮台旋转角度的分辨率为0.00005°,对于反射及衍射实验所要求0.001°的定位精度理论上能够满足。
2 气浮支承转动平台精度测试
气浮支承转动平台的精度主要包括转动定位精度和重复定位精度,定位精度是气浮台在控制系统控制下摩擦轮驱动定位所能达到的精度,重复定位精度是指气浮台在摩擦轮驱动下反复进行定位所得到的位置精度的一致程度。由于实际实验时,反射臂只会从零点往一个方向进行定位,因此本文仅探讨气浮台的单向定位精度及单向重复定位精度。
2.1 测试方法
实际使用中反射臂负载重达1200kg,但是受限于制造的花岗岩平台的承重能力,现场对气浮台上所加载的铅砖负载只有800kg。使用ELCOMAT 3000型双轴电子自准直仪进行角度测量,ELCOMAT 3000双轴电子自准直仪是一种高精度的角度测量仪器,测量范围为±1000'',分辨率最小为0.005''。
气浮支承转动平台中气浮台的转角行程为45°左右,受限于自准直仪的测量范围最大只能达到不到0.5°,因此为了测试气浮台全行程的重复定位精度及定位精度,在此从花岗岩测试平台左侧往右侧每隔5°依次取点,分别标记为1、2、3、4、5、6、7、8总共8点,在每个点均架设自准直仪进行测试,测试时气浮台首先转动到该点左侧5°处,然后再由左往右运动到该点进行定位,在每点均进行6次往返测试。测试方法如图5所示。测试时气浮垫一直保持上浮状态。

图5 气浮支撑转动平台精度测试方法示意图Fig.5 Accuracy test method of rotation stage with air bearing support.
图6 为在现场使用自准直仪进行测试的情况。
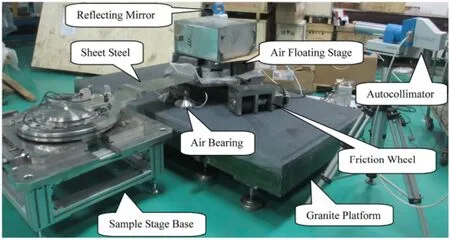
图6 使用自准直仪进行现场精度测量Fig.6 Accuracy test with the use of autocollimator.
2.2 数据处理
在绕着样品底座中心每一个目标点进行旋转定位时,将产生6个不同的实际定位点Pij,用实际定位点Pij减去目标位置Pi即为该次运动的位置偏差值Xij,根据6次测量的偏差值就可确定该点的平均位置偏差值和位置偏差的标准不确定度Si[8–11]。
每次运动的位置偏差值Xij为:
由n次单向趋近某一位置iP所得的平准位置偏差值为:
通过对某一位置iP的n次单向趋近所获得的位置偏差标准不确定度的估算值为:

从式(5)可以看出测量次数越多,标准偏差的标准不确定度越小,试验数据越可靠[12]。
依据国家标准,某一位置iP的单向重复定位精度为:

而轴线单向定位精度则为:

通过电子自准直仪所测数据及通过式(7)对数据所做的处理结果如表1所示。
利用表1所处理的数据做出气浮台的单向定位精度和单向重复定位精度曲线如图7所示。
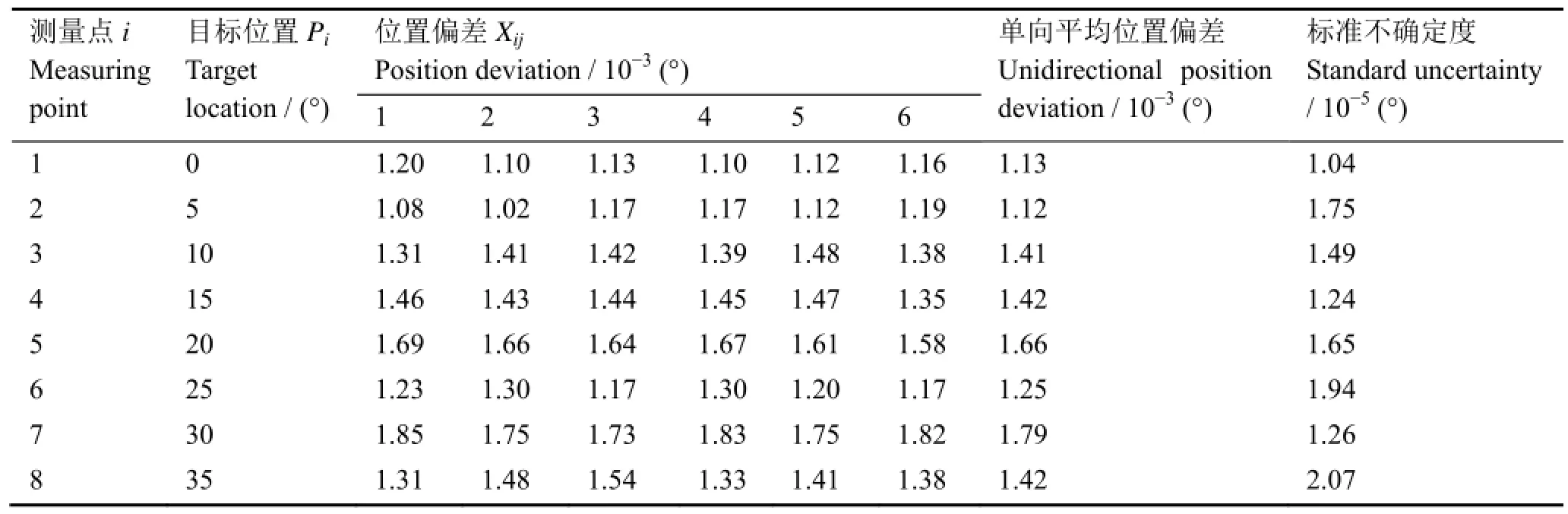
表1 气浮支撑转动平台单向精度测试数据Table 1 Data of unidirectional accuracy test of rotation stage with air bearing support.
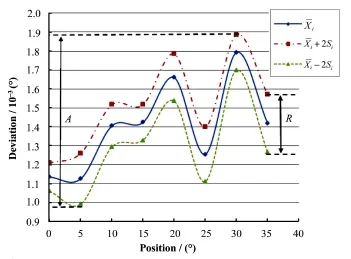
图7 气浮支撑转动平台的单向定位精度和重复定位精度曲线Fig.7 Positioning accuracy and repeatability positioning accuracy curves of rotation stage with air bearing support.
曲线最高点与最低点的整个变化范围即为定位精度A,而重复定位精度则是绕轴线任意位置Pi点的重复定位精度的最大值。因此由图7可知,气浮台的单向重复定位精度为R=0.00031°,单向定位精度为A=0.0009°。
3 结语
为满足多功能反射谱仪反射臂对重负载、大行程及高精度的运动要求,设计采用气浮支承和摩擦轮驱动的组合结构,通过气浮实现了反射臂与地面之间不接触无摩擦,再通过摩擦轮驱动实现反射臂绕着样品中心进行精确定位运动。为了验证该方案的可行性进行了气浮支承转动平台样机的研制,气浮台由三组气浮垫支撑,并放置在一块1000mm×2000mm的花岗岩平台上,气浮台与放置在花岗岩平台一侧的样品台底座处的交叉滚柱轴环通过薄钢板相连,在气浮台的一侧设置有一摩擦轮。气浮支承转动平台的行程为45°,测试时气浮台所加负载为800kg。通过使用双轴电子自准直仪对气浮支承转动平台的精度测试可知,其单向重复定位精度为0.00031°,单向定位精度为0.0009°。试验结果表明气浮支承加摩擦轮驱动的结构所能达到的定位精度要优于反射及衍射实验所要求的0.001 °,能满足多功能反射谱仪反射臂的运动要求。
1 Penfold J, Tun Z, Cubitt R, et al. Neutron reflectometry: a probe for materials surfaces[C]. Proceedings of a Technical Meeting Organized by the International Atomic Energy Agency, Vienna, 2004
2 李天福, 陈东风, 刘蕴韬. 中子反射技术及其在薄膜材料研究中的应用[J]. 中国材料进展, 2009, 28(12): 6–9
LI Tianfu, CHEN Dongfeng, LIU Yuntao. Neutron reflectometry and its application in studies of thin films[J]. Materials China, 2009, 28(12): 6–9
3 Fang S X, Fu S N, Qin Q, et al. Physics parameters and design study for the Beijing spallation neutron source[J]. Journal of the Korean Physical Society, 2006, 48(4): 697–702
4 Wei J, Chen H S, Chen Y W, et al. China spallation neutron source: design, R&D, and outlook[J]. Nuclear Instruments and Methods in Physics Research A: Accelerators, Spectrometers, Detectors and Associated Equipment, 2009, 600(1): 10–13
5 叶燚玺. 超精密运动平台中气浮支承振动特性的研究[D]. 武汉: 华中科技大学, 2010
YE Yixi. Vibration characteristic research of ultraprecision motion stage with air bearings supports[D]. Wuhan: Huazhong University of Science and Technology, 2010
6 何学明, 陈学东, 曾理湛, 等. 超精密气浮平台的定位精度分析[J]. 华中科技大学学报(自然科学版), 2008, 36(3): 8–11
HE Xueming, CHEN Xuedong, ZENG Lizhan, et al. Analysis of the positioning accuracy of ultra-precision stage with air-thrust bearings[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2008, 36(3): 8–11
7 左昊诚, 姜伟, 张鸣, 等. 偏心驱动下气浮支承精密运动平台的稳定性和精度分析[J]. 机械制造与自动化, 2014, 43(1): 11–13
ZUO Haocheng, JIANG Wei, ZHANG Ming, et al. Stability and accuracy analysis of precision motion stage with air bearings under eccentric driving force[J]. Machine Building & Automation, 2014, 43(1): 11–13
8 GB/T17421.2-2000, 机床检验通则第二部分: 数控轴线的定位精度和重复定位精度的确定[S]. 2000
GB/T17421.2-2000, Machine tool inspection norm of second parts: CNC axis to determine the accuracy and repeatability of positioning[S]. 2000
9 贾学志, 王栋, 张雷, 等. 轻型空间相机调焦机构的优化设计与精度试验[J]. 光学精密工程, 2011, 19(8): 1824–1831
JIA Xuezhi, WANG Dong, ZHANG Lei, et al. Optimizing design and precision experiment of focusing mechanism in lightweight space camera[J]. Optics and Precision Engineering, 2011, 19(8): 1824–1831
10 刘慧玲, 曾韬, 刘建湘. 数控机床定位精度的测量和评定[J]. 机械研究与应用, 2005, 18(6): 38–39
LIU Huiling, ZENG Tao, LIU Jianxiang. Measurement and assessment of the error of the numerical control machine tool[J]. Mechanical Research & Application, 2005, 18(6): 38–39
11 冷汹涛. 数控机床定位精度和重复定位精度的检验[J].机床与液压, 2008, 36(8): 191–195
LENG Xiongtao. Testing of positioning accuracy and repeated positioning accuracy of CNC machine tool[J]. Machine Tool & Hydraulics, 2008, 36(8): 191–159
12 毛英泰. 误差理论分析与精度测试[M]. 北京: 国防工业出版社, 1982
MAO Yingtai. Error theory and precision analysis[M]. Beijing: National Defense Industry Press, 1982
CLC TH113.2, TL99
Structure design and accuracy test of high precision rotation stage with air bearing support
XIAO Songwen1,2SUN Yuan1,2HAN Qingfu1,2,3ZHOU Aiyu1,2,3ZHU Tao4
1(China Spallation Neutron Source, Institute of High Energy Physics, Chinese Academy of Sciences, Dongguan 523803, China)
2(Dongguan Institute of Neutron Science, Dongguan 523808, China)
3(Beijing Synchrotron Radiation Facility, Beijing 100049, China)
4(Institute of Physics, Chinese Academy of Sciences, Beijing 100190, China)
Background: Multi-purpose Reflectometer (MR) is one of the three spectrometers under construction at China Spallation Neutron Source (CSNS). The reflection arm is a key component in MR, which is used to carry the neutron detector. The size of the reflection arm is 1750 mm×1000 mm×800mm (L×W×H), and the weight is 1200kg. The reflection arm should rotate around the sample center with a rotation range of 130°, and the accuracy of the rotation should be higher than 0.001°. Purpose: This study aims to design the structure with the combination of air bearing support and friction wheel drive for the movement request of heavy load, large travel and high precision in the reflection arm. Methods: A high precision rotation stage with air bearing support is developed to verify the feasibility of this structure in which no contact and friction between reflection arm and granite floor when the air bearing works. The air floating stage is supported by three sets of air bearings, which is placed on a granite platform with the size of 1000 mm×2000 mm, a sample stage base is located on one side of the granite platform, a sheet steel is used to connect the air floating stage and the cross roller bearing which is installed in the sample stage base, a friction wheel is installed in the side of the air floating stage. The rotation range of the air floating stage is 45°, and the load of the air floating stage under test is 800kg. Results: The accuracy test indicates that the rotation stage with air bearing support can offer the repeatability positioning accuracy of 0.00031°, and the positioning accuracy of 0.0009° within the scope of whole rotation range. Conclusion: These results show that the structure with the combination of air bearing support and friction wheel drive can satisfy the movement requirement of the reflection arm in MR.
Air bearing support, Friction wheel drive, Accuracy test
TH113.2,TL99
10.11889/j.0253-3219.2015.hjs.38.030403
中国散裂中子源(CSNS)工程项目经费资助
肖松文,男,1987年出生,2011年毕业于东北大学,主要从事中子谱仪机械设计
韩庆夫,E-mail: hanqf@ihep.ac.cn
2014-11-19,
2014-12-25
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
纺织科学研究(2021年6期)2021-12-02 20:32:56
数学小灵通(1-2年级)(2021年9期)2021-10-12 05:37:08
装备制造技术(2020年9期)2021-01-26 00:15:08
表面工程与再制造(2019年3期)2019-09-18 01:35:22
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
工业设计(2016年8期)2016-04-16 02:43:35
核科学与工程(2016年3期)2016-01-03 07:22:21
新闻前哨(2015年2期)2015-03-11 19:29:30