基于FPGA 的振动信号采集系统设计及实现*
2015-11-28 03:06王凌伟
山西电子技术 2015年3期
王凌伟,樊 瑞,秦 冲,赵 君
(中航工业西安航空计算技术研究所,陕西 西安 710065)
随着生产机械、运输机械或工程结构向着高速、高效、高精度和大型化发展,机械设备的任何部件出现故障都可能降低加工精度,带来较大的经济损失,甚至危及人身安全。机械部件的振动状态监测已成为生产中的一个必不可少的环节,并对相应机械部件进行早期的故障预测[1,2]。文中采用FPGA 为核心开发振动信号采集系统,对数据采集模块及通讯模块进行了同步设计。
1 总体设计
振动信号采集系统以FPGA 芯片为核心,通过A/D 转换芯片采集振动信号,然后通过RS-422 串行总线接口将采集的数据传输给上位机,在故障诊断软件以作出相应的诊断处理。振动信号采集系统的硬件按照功能模块可以划分为信号调理电路、A/D 转换电路、FPGA 控制逻辑和RS-422 接口转换电路[3],系统硬件结构如图1 所示。

图1 系统硬件结构框图
系统硬件各个功能模块的作用如下:
1)信号调理电路:信号调理电路主要对由集成电路压电式(Integrated Circuit Piezoelectricity,ICP)加速度传感器采集到的振动信号进行调理驱动、放大和抗混叠滤波处理,使模数转换器(Analog to Digital Converter,ADC)芯片能够获取该振动信号,并作出进一步处理工作。
2)A/D 转换电路:A/D 转换电路将经过信号调理的信号进行模/数转换,并将转换结果传送至FPGA 进行数据采集,此功能电路决定了整个系统的分辨率和采集精度。
3)FPGA 控制逻辑:FPGA 芯片是该主控模块的核心部分,控制振动信号的采集和数据传输[4],此功能电路控制着系统的采样周期。
4)RS422 接口转换电路:将A/D 转换后的数字信号,通过RS422 总线传输到上位机。
2 硬件电路设计
2.1 恒流源电路
系统采用ICP 集成电路压电式加速度传感器检测被测设备的振动信号,它将传统压电加速度传感器和放大器集于一体,供电和信号输出共用同一根电缆,通过恒流源为其供电,输出信号经过信号调理电路后连接单片机进行测试,使采集系统得到了简化,减少电缆的数量,同时省去了电荷放大器,降低了成本。
ICP 传感器所需的供电电源必须能够提供18~30 V 的直流电压以及2~20 mA 的恒定电流。由于传感器共用电源线与信号输出线,所以它的输出信号会包含一个8~14 V 的直流偏置电压,通过去耦电容滤除信号中的直流分量。
本系统采用TI 公司的三端可调恒流源器件LM334 芯片。LM334 为单片三端可调恒流源,实际应用中,改变连接电阻就可构成不用独立电源的两端理想电流浮置源,改变R可以改变恒流源的电流值,其公式为:

系统中设置为LM334 的工作电压28 V,电阻R 标称值33 Ω,输出电流为2 mA。
2.2 信号调理模块的设计
2.2.1 隔离、放大电路设计
ICP 加速度传感器输出信号包含有直流偏置电压,电路设计隔直电容C1 和C2 滤除此直流分量,然后采用精密仪表运算放大器芯片实现对模拟信号的放大处理,,通过调节外部比例电阻可完成增益从1 至10 000 之间的任意选择。隔离、放大电路的原理图如图2 所示。

图2 振动信号采集电路
N1 为精密仪表运算放大器,其增益值依据下式可计算得出:

式中:G 为电压放大增益;Rref为比例参考电阻,单位Ω。
现阶段取Rref开路,即Rref=∞,计算可知G=1。
R1、R2 为输入端匹配电阻,标称值4.7 kΩ。
R3、R4 为开路接地电阻,标称值1 MΩ。
C1、C2 为输入端隔直电容,标称值0.1 μF,额定电压值50 V。通过C1,C2 和R3,R4 构成的高通电路,-3 dB 截至频点是15.92 Hz,对信号进行隔直处理,同时不影响采集信号。
C3、C4、C5 为精密仪表运算放大器输入端的滤波电容,标称值为0.001 μF、0.01 μF、0.001 μF,与R1、R2 构成低通电路,对共模信号的-3 dB 截至频点是33.87 kHz,对于差模信号的-3 dB 截至频点是1 610 Hz,有效的滤除进入采集电路的干扰信号。
2.2.2 抗混滤波电路设计
经过放大处理后的振动信号会混杂有高频干扰信号,这些高频信号就会产生频率混叠现象,造成采集系统的精度下降。
抗混滤波电路采用二阶压控电压源低通滤波电路[5],滤波器的截止频率则由电阻R1、R2 和电容C1、C2 控制。二阶低通滤波电路的原理图如图3 所示。
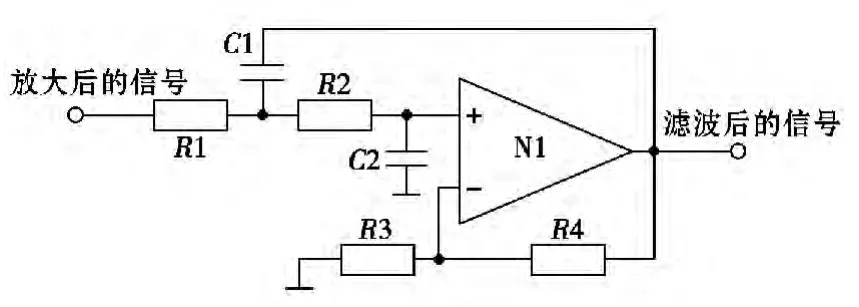
图3 二阶滤波电路
滤波电路设计参数如下:
R1=R2=15 kΩ,R3=R4=10 kΩ,C1=C2=10nF;
二阶低通滤波电路的传递函数为:

式中:A(s)为开环增益;Q 为等效品质因数;ωn为电路的特征角频率s。
其中Avf=1+R3/R4=2,Q=1/(3- Avf)=1 >0,故A(s)的极点全部位于左半s 平面,电路不会产生自激震荡。
另一方面,由滤波电路传递函数可得幅频响应表达式为:

可以计算出,其在ω/ωn=10 时,幅频特性曲线有-40 dB的衰减,电路的幅频响应具有较好的低通特性,滤波器截止频率f=1/2πRC≈1 062 Hz。
2.3 数据采集模块的设计
数据采集模块主要围绕A/D 转换芯片展开设计,系统选用单通道的16 位A/D 转换芯片进行采样,采样频率最高分别可达100 ksps。目标采样的振动信号的频率一般为低频信号,设计采集系统的检测5 kHz 频率范围内的振动信号,按照香农采样定理,A/D 转换芯片的采集速率应不小于10 k 每秒,100 ksps 的A/D 转换芯片完全可以满足本系统需求。
由于A/D 转换芯片输出电平为5 V 的TTL 电平,需要配置电平转换芯片,将5 V 电平转换为3.3 V 电平,再送入现场可编程门阵列(Field Programmable Gate Arrays,FPGA),完成对采集电路中A/D 转换芯片的时序控制。
A/D 转换公式:A/D 芯片采集到的数值为0~0xFFFF的16 位二进制数,对应-10 V~+10 V 的电压,电压转换计算公式如下:
当AD 值小于0x8000:

当AD 值大于等于0x8000:

2.4 通讯模块的设计
RS-422 驱动电路由UART 协议、电平转换和接口电路组成,其中协议转换由可编程逻辑实现。串行接口数据格式为:1 个起始位,8 个数据位,奇校验位,1 个停止位,工作频率设计在115 200 bps。FPGA 芯片将采集到的AD 转换后数据转发到RS-422 总线。由于AD 采集芯片为16 bit,所以在设置先发数据的高8 bit,再发送数据的低8 bit。
3 可编程逻辑设计
3.1 可编程逻辑功能设计
系统选用Xilinx 公司的Spartan 系列芯片,此系列具有性能优良、性价比高、非易失性等特点,扩展了片上flash 存储器,用于FPGA 的配置和非易失性数据的存储,具有充足的资源满足采集系统的逻辑功能需求。可编程逻辑采用模块化的设计思想,设计AD 采集模块和UART 协议模块。
3.1.1 AD 采集模块
FPGA 芯片控制A/D 转换芯片RC 信号为低电平,AD芯片启动转换工作,同时BUSY 信号输出低电平,转换完成后AD 芯片BUSY 信号重置高电平,AD 芯片数据输出端口输出有效数据。FPGA 检测到BUSY 信号,将AD 芯片转换后的数据存入UART 发送寄存器中。
3.1.2 UART 协议模块
UART 协议模块采用的是串口通讯协议软核,其设计特点是:
1)波特率为9 600 bps~115.2 kbps 可通过软件编程;
2)内建128 字节接收FIFO 和128 字节发送FIFO;
3)数据长度、停止位长度、奇偶校验可通过软件进行编程;
4)计算公式:波特率=外部时钟(14.745 6 MHz)/(16 ×分频因子)。
3.2 系统功能逻辑设计
采集系统的控制设计为周期自动采集,一次采样过程如下:首先启动A/D 转换器,然后判断BUSY 信号转换是否结束,A/D 转换结束后FPGA 读取A/D 转换结果,并直接存入UART 发送寄存器,然后等待延时到下一周期,并开始第二次采集,自动完成振动信号的采集。FPGA 的自动控制流程如图4 所示。

图4 FPGA 自动控制流程
系统设计采样周期为200 us,远大于A/D 转换芯片的转换时间,决定了系统的采样速率5 kHz,可满足大多数机械部件振动信号的采集要求。采样周期控制由FPGA 使用的时钟计数决定,此系统使用的时钟为10 MHz,系统的周期误差来源于晶振本身的误差,系统使用的晶振初始频率-温度误差为50 PPM,具有极小的时钟误差。
4 系统功能验证
为了验证振动信号采集系统的各项功能,本研究采用由振动台输出的正弦信号作为系统的输入激励,由本文设计的采集系统对该振动信号进行采集,从而检验系统采集功能的准确性。试验中用到的设备情况如下:使用随机振动台,施加21.5 Hz 正弦振动激励信号,幅值分别为1 g 和2 g 两种激励,使用振动传感器精度为104 mV/g,测量结果为图5 和图6 所示。
由图可以看出,信号的幅值接近激励值,与输入的正弦激励信号基本一致,进行频率分析,进行FFT 转换后频率为21.5 Hz,与输入激励信号的频率一致。实验结果表明,该振动信号采集功能正确。

图5 1 g 正弦信号的测量结果
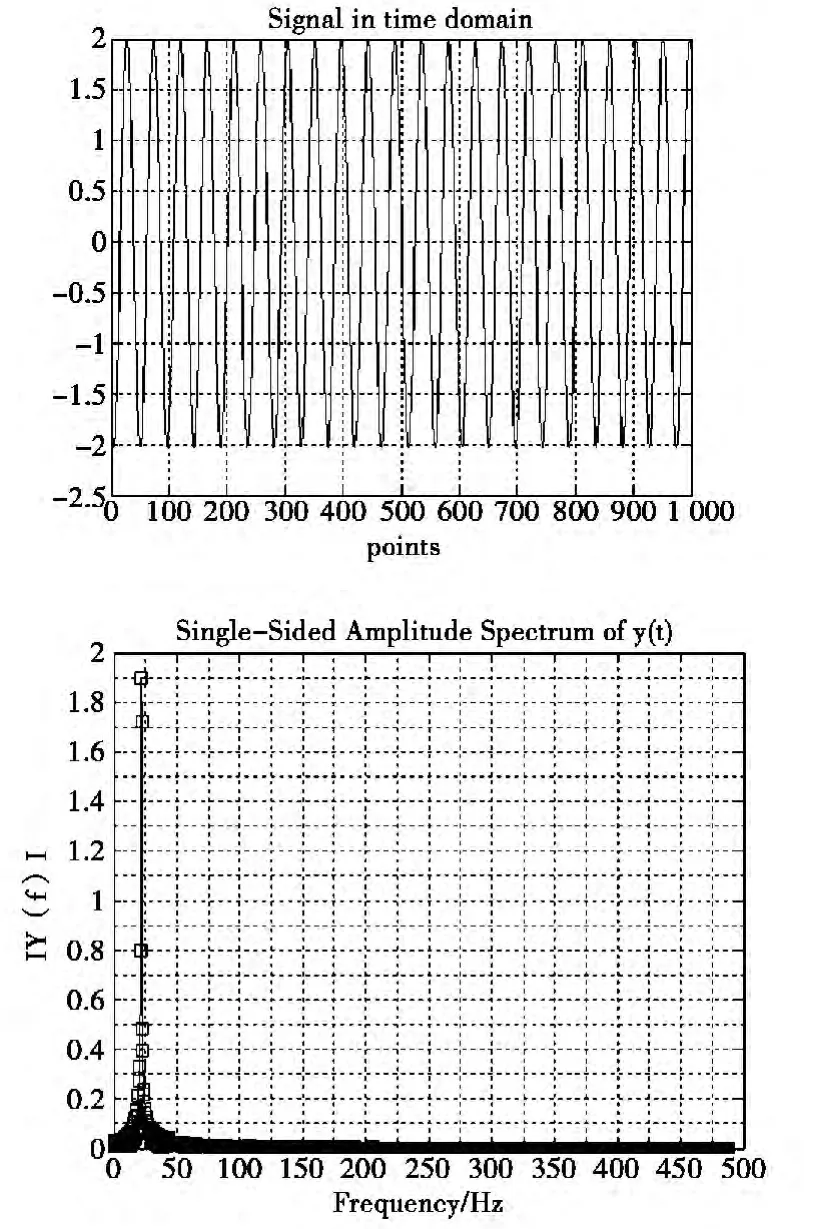
图6 2 g 正弦信号的测量结果
5 结论
本文提出的FPGA的振动信号采集系统具有硬件组成少,可在不需要中央处理器即可完成数据的自动采集,且具备并行可扩展性,功能移植性好,同时具有较高的采样周期和精度,可以满足大多数工业与航空领域中振动采集的要求。
[1]李德葆.工程振动试验分析[M].北京:清华大学出版社,2004.
[2]李允公.机械故障诊断与状态监测特征提取中的若干典型问题的研究[D].沈阳:东北大学,2005:15.
[3]曹恒,秦颖颀,王春,等.两线制IEPE 传感器前置信号调理电路[D].仪表技术与传感器,2012:11.
[4]杨晓慧,杨永健.基于可编程模拟器件的小信号测量系统[J].仪器仪表学报,2005,26(8):6-8.
[5]康华光,陈大钦.电子技术基础(模拟部分)[M].第5版.北京:高等教育出版社,2006.
猜你喜欢
环球时报(2022-09-29)2022-09-29
今日农业(2021年19期)2021-11-27
基层中医药(2021年5期)2021-07-31
军民两用技术与产品(2021年12期)2021-03-09
今日农业(2020年13期)2020-08-24
今日农业(2019年16期)2019-01-03
湖北工业大学学报(2016年5期)2016-02-27
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27