接触式干涉仪大量程数字化技术改造
2015-11-27 03:39磊徐守品
精密制造与自动化 2015年4期
王 奎 霍 磊徐守品
接触式干涉仪大量程数字化技术改造
王 奎1霍 磊2徐守品3
(1. 开阳质量计量检验检测中心有限公司 贵州开阳550300;2. 濮阳市质量技术监督检验测试中心 河南濮阳457000;3. 九江职业技术学院机械工程学院 江西九江 332007)
接触式干涉仪是利用微差比较测量法测量长度的高精度计量仪器,长时间测量眼睛极易疲劳、劳动强度大、易引入瞄准读数误差等缺点。在保留高精度光波干涉计量特点和基本保持原仪器光机结构的前提下,应用高像素CMOS图像器件及计算机图像处理技术改造传统的接触式干涉仪,可以在扩大原仪器量程的情况下实现量块检定的数字化智能化。
500万像素 CMOS摄像器件 接触式干涉仪 Matlab语言
目前部分省级计量部门及企业用于量块标准传递所使用的接触式干涉仪,均是六、七十年代产品,其瞄准、测量读数靠单人通过显微目镜观察瞄准,视野狭窄,长时间测量,劳动强度大,眼睛极易疲劳,易引入瞄准读数误差,且量块检定工作中,测量数据多,需人工计算每块量块所得数据,计算量大。
现代可视技术常用的光电图像器件如CCD器件,其空间分辨率高、体积小、重量轻、实时传输性等方面具有很高优越性。
CMOS图像器件近年也得到了迅速发展,其光电特性逐步接近CCD图像传感器件,易于实现图像数字化输出,但价格及体积却较CCD器件有优势。先后有单位利用CCD/CMOS摄像器件改造接触式干涉仪,把原先用人眼观察显微镜下的干涉条纹实时显示在CRT屏幕上,同时干涉条纹图象被自动采集处理,量块检定数据存储处理自动化,提高工作效率,降低了劳动强度。
部分改造后的仪器,采用的摄像头最高像素为200万即分辨率为1 600x1 280,其在利用3等量块检定4等量块时量程还是原仪器±5μm,没有解决原仪器在0.1 μm分度值时,因量程小导致找干涉条纹像较费时,本文则介绍采用500万像素CMOS摄像头改造原老式接触式干涉仪,在保证原仪器准确度条件下扩大了量程达50%以上,方便了操作,实现了测量数字化。
1 仪器结构及改造原理
该项改造保留原仪器高精度光波干涉计量特点,基本保持原仪器光、机结构,且使用习惯不变。采用500万像素高分别率数字摄像头替换原仪器分划目镜,如图1所示。
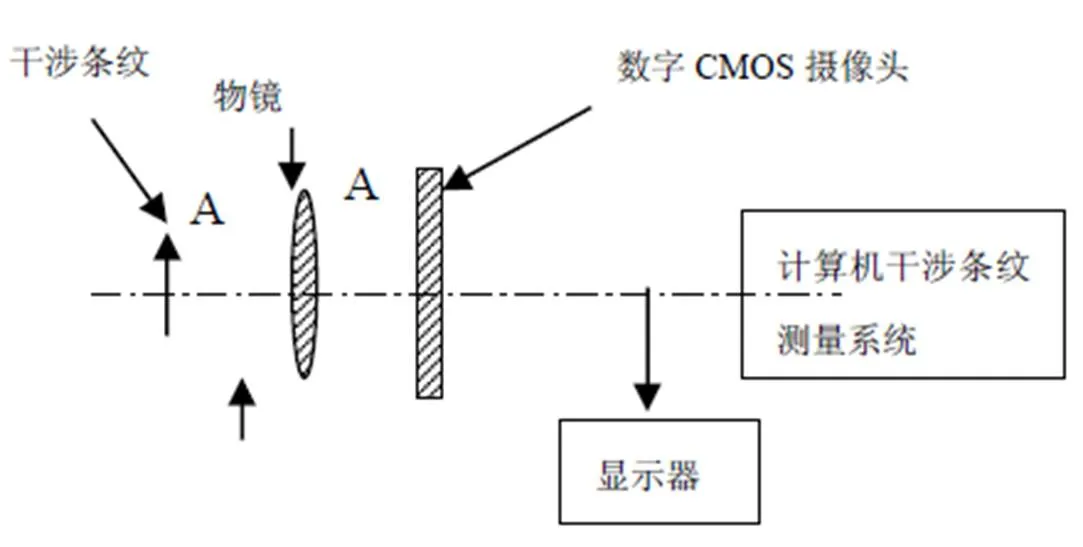
图1 仪器结构示意图
图1中,原仪器因微小长度变化形成的干涉条纹图像经物镜放大成像于CMOS摄像头上(代替原目视刻线分划板),摄像头输出信号不需图像采集卡直接经USB口进入计算机,并实时显示在电脑屏幕上,经计算机图像软件数据处理后,自动采集实时显示测量数据。
2 系统关键技术点
2.1 摄像头选取
选用映美精DMK72AUC 500万像素黑白面阵CMOS摄像头,图像分辨率为2 592x1 944,像素尺寸:2.2x2.2 μm,采集得白光干涉条纹如图2所示。
2.2 实时图像显示技术
因为一般质量较好的显示器分辨率为1 980×1 084,现摄像头分辨率超出显示器范围,则显示器即使全屏显示时也不能显示摄像头采集的全部图像,同时摄像头全屏显示时图像刷新率低只有9帧/秒,动态显示图像时有停顿现象,为此采用摄像头的ROI技术即只显示部分图像(如2592x100)从而提高图像显示帧率,达到实时显示效果,并且原仪器光学系统存在缺陷导致会出现图2中右下部黑影,采用局部图像处理则可避免显示及处理有黑影部分的图像。采用matlab语言编程实现ROI显示程序如下:
vidobj = videoinput
('winvideo', 1,'RGB24_2592x1944')
vidRes=get(vidobj,'VideoResolution')
nBands=get(vidobj,'NumberofBands');
axes(handles.axes2); hImage=image(zeros(vidRes(2),vidRes(1),nBands));
vidobj.ROIPosition = [0 10 2592 200];
preview(vidobj,hImage);

图2 白光干涉条纹示意图
2.3 干涉条纹数字图像处理技术
(1)数据滤波摄像头采集的干涉图像由于各种因素影响,如光源、CMOS器件、视频模拟信号数字化过程中存在不同程度的随机噪声,反映在图像灰度值大小上,为了消除这些随机干扰,采用平滑滤波方法,具体应用Matlab中维纳滤波器wiener2函数实现。
编程示例如下:
bw1=getsnapshot(vidobj(1));
bw1=wiener2(bw1,[7,7]);
(2)白光干涉条纹中心最小二乘曲线拟合求解。图3所示为采集的白光干涉图像灰度值离散数据中光强峰值曲线图。
零级黑条纹中心光强度最暗,属于极小灰度值点,但此极小值只表明黑条纹中心的大致位置,其原因是图像光强分布的随机波动,大多数情况条纹中心距不是光敏元中心距的整数倍。
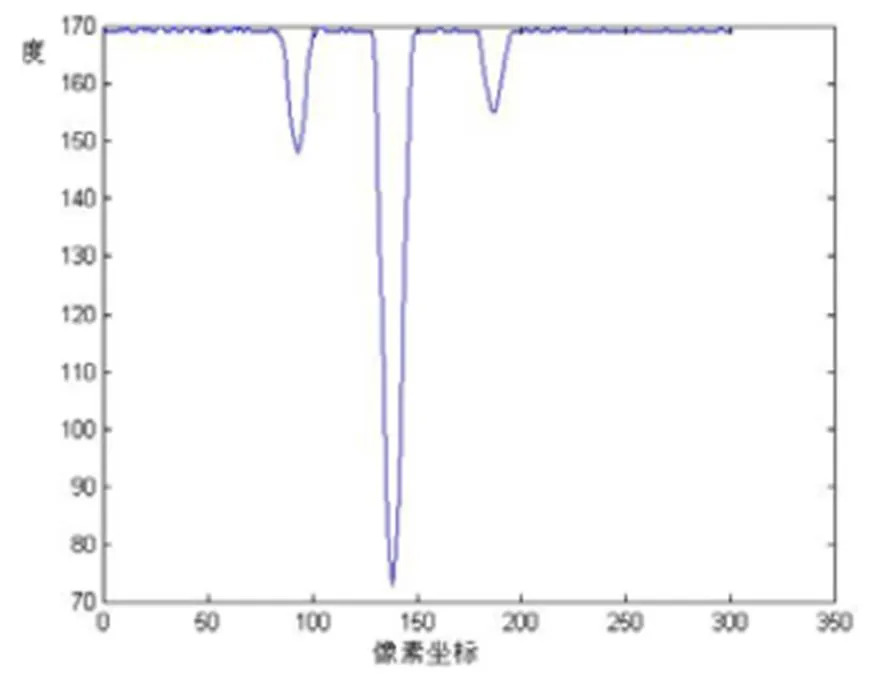
图3 光强峰值曲线图
条纹中心的准确位置采用局部拟合曲线求极值方法来确定,同时实现了亚像素细分,经试验采用二次曲线拟合模型,它既与干涉条纹峰值曲线相近似,又易于实现最小二乘法拟合运算,所采用拟合曲线模型为:
()=2²+ax+a
用条纹峰值附近10个点拟合即-5、-4、-2、-1、0、1、2、3、4、5(y为平滑滤波后数据),所对应像素坐标为-5,~5,由最小二乘原理解方程组确定拟合系数1、2、0,而后在(-55)范围确定使()取得最小值的坐标minxx,具体编程如下:
x = [0 2592];
y=[100 100];
c=improfile(bw1,x,y);
n=numel(c)
[yce,xce]=min(c);
xx=(xce-5):(xce+5)
yy=c(round(xx))';
a=polyfit(xx,yy,2)
xm=(xce-5):0.1:(xce+5)
y5=a(1)*xm.^2+a(2)*xm;
[~,xce2]=min(y5);
minxx(l)=xce2/10+xce-5;
根据零级黑条纹中心光强度最小,属于极小点首先进行极小值点搜索,在极小值点拟合确定条纹中心精确亚像素坐标位置minxx i,为减小随机误差,在垂直于条纹方向得到多个minxx i然后取平均值。
2.4 定度

2.5 界面功能设计
系统设计主要界面如图4所示。仪器软件操作界面设计遵循保留原目视仪器操作习惯原则设计,力求简单方便和一目了然。

图4 系统设计主要界面
在WINXP/WIN7系统环境下运行,具有动画模显和动态数显功能且在图像背景上叠加十字分划板图像,可依据检定规程获得受检量块的中心长度值,长度变动量,数据存储及打印。
3 结语
改造后的接触式干涉仪具有0.01 μm分辨率,扩大了量程达到±(7.5~10) μm(当原仪器光学系统良好时可达到±10 μm,接近精密光学计量程),仪器示值误差在2 μm范围内≤±0.04 μm;10 μm范围内≤±0.08 μm。经过实际使用证明该系统变目视观察与判读为光电探测、自动瞄准、测量,实现了数据自动采集、显示、计算和记录,消除了人为判读差错的可能性,提高了工作效率,实现数字化实时测量。
[1] 周一览等.一种CCD显微测量系统[J].计量技术,2000.6.
[2] 张旭东等.一种基于Matlab的干涉条纹自动处理方法[J].计量学报,2010,1.
[3] 胡志刚等.接触式干涉仪CCD智能化改造[J].计量与测试技术,2004,6.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
计测技术(2020年6期)2020-06-09
小福尔摩斯(2019年2期)2019-09-10
商品与质量(2019年12期)2019-07-24
航天电子对抗(2019年4期)2019-06-02
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
仪器仪表用户(2019年4期)2019-04-09
制导与引信(2017年3期)2017-11-02
山西青年(2016年22期)2016-11-30