单目视觉在围油栏前端浮筒捕获装置中的应用
2015-11-26 09:28戴文马得尧刘宇翔吕文飞杨前明
机床与液压 2015年19期
戴文,马得尧,刘宇翔,吕文飞,杨前明
(山东科技大学机械电子工程学院,山东青岛266590)
0 前言
随着经济全球化进程的不断加快,海上石油开采量以及石油运输量迅速增长,复杂的海上环境造成了海面溢油事故的频频发生,严重威胁着海洋生态环境和沿海居民的身体健康。
当海面溢油事故发生时,通常利用溢油回收船回收溢油。溢油回收船的船体双侧,内嵌专业围油栏[1],作业时利用围油栏前端浮筒捕获装置将围油栏迅速导出并伸展开。溢油回收船携带的浮筒捕获装置通常为框架式结构,此种结构分别在上、下两端安装一个连接钩,连接钩的间距基本与浮筒同高。工作时,2个连接钩必须恰好固定连接浮筒的上、下两端,依靠浮筒自身的向前运动,以及捕获装置向外的
拉力作用,共同完成捕获浮筒并展开围油栏的动作。此种结构比较简便轻巧,但适应性低,需要人眼配合操作,捕获时间一般较长,不但大大增加收油清污的作业成本,还会贻误海上作业的最佳时机[2]。
针对这一问题,设计开发了由单目视觉单元、计算机和机械臂执行机构,3部分组成的围油栏前端浮筒捕获装置,利用单目视觉系统的定位原理,完成对浮筒中心坐标的提取和准确定位[3],以提高溢油回收船的自动化程度和作业效率。
1 系统原理与结构
围油栏前端浮筒快速捕获系统,由CCD图像采集模块、计算机图像处理模块和机械臂执行机构3部分组成[4],如图1所示。

图1 围油栏前端浮筒快速捕获系统结构图
图像采集模块,由一台固定在机械臂最前端的CCD摄像机、图像采集卡组成一个单目视觉单元,负责摄取目标物图像信息。由图像采集卡采集图像信息,送入上位机进行图像的识别定位,从而计算浮筒的三维坐标及机械臂的位移距离。然后将数据传输给下位机PLC,由下位机PLC根据计算结果,驱动执行单元,完成浮筒的捕获操作。工作人员通过上位机实时画面可以直接进行监控和操作[5]。
2 基于单目视觉的定位方法
2.1 摄像机标定
在视觉系统中,对摄像机的标定,采用张正友标定法。由计算机绘制一张含有8×8个方格的黑白棋盘格平面图样,且方格的大小一定。以1∶1的比例打印出来贴在光洁的玻璃板上,作为实验用标定模板[6],标定模板中共有64个角点。
摄像机的标定是在Microsoft VS2008环境下进行的。标定时,采用对标定模板多角度图样采集的方法,获取20帧不同位姿的标定模板图像。标定过程中,软件对每一幅图像提取角点并绘制出来,绘制角点的图像如图2所示。
图2 VS环境下绘制角点图
图像全部成功提取角点后,利用单目视觉系统的几何映射关系,对摄像机的内、外参数进行求解。
在视觉系统中,一个2D点可以表示为m=[u,v]T,一个3D点可以表示为 M = [X,Y,Z]T。其增广矩阵分别表示为 ~m= [u,v,1]T以及 ~M =[X,Y,Z,1]T。3D点与其投影到平面的2D点之间的关系可以表示为

式中:s是标准矢量;A为摄像机内部参数;R,t为摄像机的外部参数。标定时假设模板平面,在Z=0的平面上,由式 (1)可以得到
由此得到一个3×3矩阵

由映射矩阵H可得到内参数矩阵A的约束条件h 1T A
TA-1h2=0。利用约束条件线性求解内参数A。
式 (4)中B是一个对称矩阵,可以用向量b=[B11,B12,B13,B22,B23,B33]T来表示,通过矩阵变换及解算,可求得矩阵B及内参数矩阵A。再由矩阵A和映射矩阵H,分别计算20帧图像的旋转矩阵R和平移向量t。最后利用最大似然估计法,对获取的内、外参数进行优化[7]。
为了验证VS环境下标定的准确性,在Matlab2012环境下,用同一组图样进行了标定,绘制角点的图像如图3所示。可见,标定过程中20帧不同位姿的图像提取、绘制的角点,与VS环境下完全相吻合。
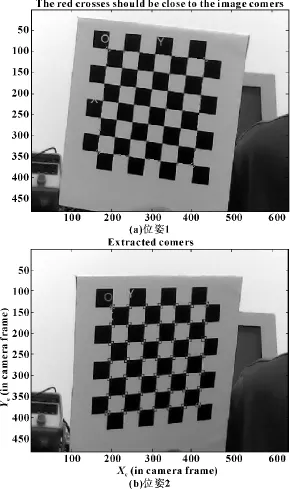
图3 Matlab环境下绘制角点图
2.2 目标中心点定位
在围油栏前端浮筒快速捕获系统中,目标识别及定位的关键,在于对围油栏前端浮筒顶部圆心的检测。相对于其他检测方法,Hough变换在图像存在噪声、变形、部分区域丢失的情况下,也能获得良好的检测结果,可靠性高[8]。在复杂的海上环境下,围油栏前端浮筒捕获系统对浮筒圆心进行检测时,获取图像过程中,可能会丢失部分图像信息,出现误差,所以系统选用Hough变换的方法进行检测。
在Hough变换中,圆的检测、变换过程如图4所示,x-y平面上有一圆,r为圆的半径,(a,b)为圆心坐标,其方程表示为

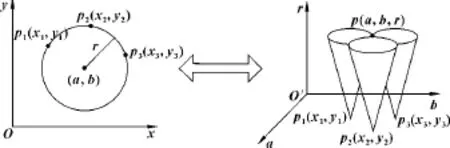
图4 Hough变换检测圆示意图
点p1(x1,y1),p2(x2,y2),和p3(x3,y3)为圆上任意三点。把图像空间中的圆,转换到a-b-r参数空间,则圆上的一点对应于参数空间中的一个三维锥面。要拟合出图像中的圆,首先要求取所有的特征点对应在参数空间中三维锥面及所有三维锥面的交点。然后统计出三维锥面相交次数最多的点,最终拟合出原空间的圆[9]。由交点坐标可推算出参数a,b,r,从而确定圆心坐标和半径。
2.3 坐标变换解算
视觉系统中,摄像机模型被简化为小孔成像模型[10],如图5所示。设OCXCYCZC为摄像机坐标系,OWXWYWZW是世界坐标系,oxy是摄像机像平面坐标系,M为空间中的任意一点,m为M在像平面上的成像点。设图像的像素坐标系为 ouv,坐标原点在摄像机像平面坐标系图像的左上角,以像素为单位。
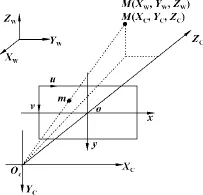
图5 标定系统的坐标系
由世界坐标系、摄像机坐标系、图像坐标系间的变换关系,经过推导可得空间一点M的世界坐标(XW,YW,ZW)与其投影点m的像素坐标 (u,v)的关系如下:
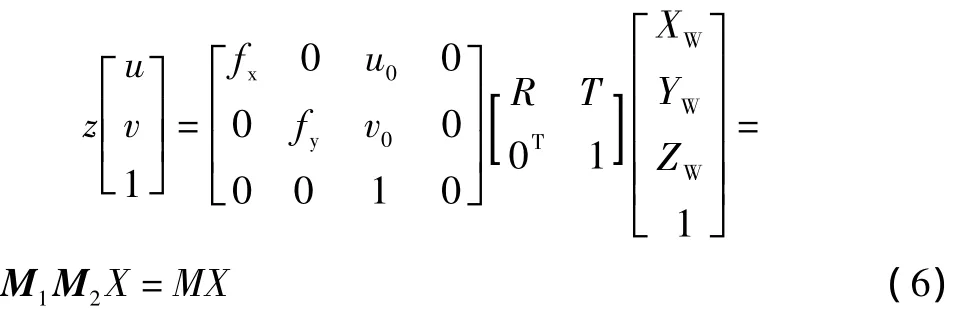
式中:fx、fy、u0、v0为摄像机的内参,可通过摄像机标定得到;R和t分别是世界坐标系到摄像机坐标系的旋转矩阵和平移向量;矩阵M1也代表摄像机的内参数矩阵;M2为外参数矩阵。在获取点M的图像坐标的情况下,根据坐标系间的转换关系,可以求得点M的三维坐标Mw。
3 实验及分析
3.1 标定结果
摄像机标定是在Microsoft VS2008环境下完成的,标定结果如式 (7)所示:
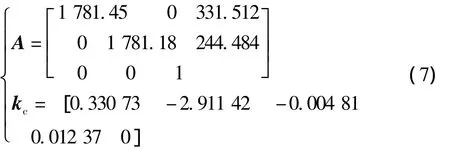
式中:A为摄像机的内参数矩阵,kc为畸变系数。
作为验证实验,Matlab2012环境下的标定结果如式 (8)所示。
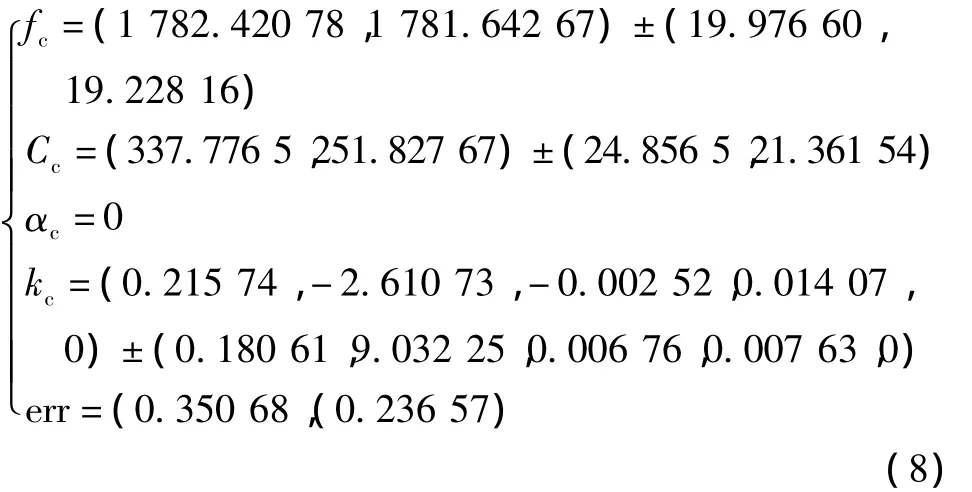
式中:fc、Cc为摄像机的内参数,分别代表焦距、图像中心点;αc为斜交参数;kc为畸变系数;err为像素误差。结果表明标定所得参数误差,满足要求。
3.2 围油栏前端浮筒的图像处理
当携带摄像头的机械臂进入浮筒正上方区域时,开始摄取目标图像,其中一帧如图6(a)所示,图像大小为640×480。首先,对原始图像进行灰度化处理得到灰度化图像,如图6(b)所示。
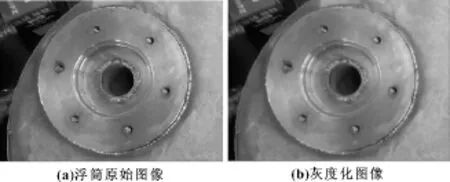
图6 目标图像及灰度化处理
Hough变换的结果是利用图像的全局特征,将特定形状的边缘连接起来,并形成连续平滑的边缘。因此在Hough变换前要对图像进行边缘检测,实验中采用Canny算子边缘检测方法。
实验一:未对图像进行去噪处理,直接对原始图像的灰度图进行边缘检测,检测结果如图7(a)所示。Hough变换拟合结果,如图7(b)所示,结果表明偏差较大。
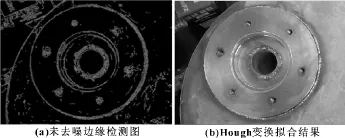
图7 图像处理检测结果
实验二:采用高斯滤波器对图像做了平滑处理,然后再用Canny算子进行边缘检测,检测结果如图8(a)所示。Hough变换拟合结果,如图8(b)所示,结果表明与实际目标相吻合。
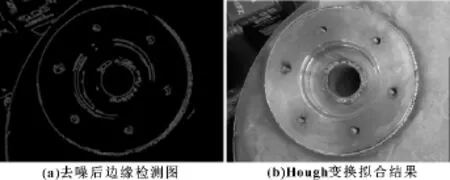
图8 图像处理检测结果
实验所得具体数据,圆心坐标,半径r及坐标误差,如表1所示。表中给出的数据均以像素为单位。实验结果表明,在对目标原始图像进行灰度化、去噪、边缘检测等一系列预处理后,利用Hough变换可以提取圆心坐标,误差小,精度高。

表1 实验数据及误差
系统由上位机软件实现对二维坐标到三维空间坐标的转换,并计算出机械臂在x-y-z 3个方向上的平移距离。通过下位机PLC发出控制指令驱动机械臂准确捕获目标,最终将围油栏快速导出、展开。
4 结论
在海上溢油回收船,围油栏前端浮筒的快速捕系统中,利用单目视觉系统的几何定位方法,对浮筒位置坐标进行了准确定位。克服了传统的捕获装置,需要人眼配合操作、时间长、效率低的缺点。在发生溢油事故时,溢油回收船通过围油栏前端浮筒的快速捕获系统,做出应急响应,提高溢油回收船的自动化程度和作业效率。
[1]刘宗江,王世刚.运油船双内嵌收油机系统的研制[J].现代制造技术与装备,2012(6):20-21.
[2]张帅,杨林.围油栏辅助海面溢油的处理方法[J].科学技术与工程,2012,12(33):9126-9128.
[3]陶文静,李文龙.RFID设备微小芯片视觉定位算法研究与实现[J].现代电子技术,2012,35(20):175-179.
[4]王修岩,程婷婷.基于单目视觉的工业机器人智能抓取研究[J].机械设计与制造,2011(5):135-136.
[5]余文勇,石绘.机器视觉自动检测技术[M].北京:化学工业出版社,2013.
[6]马颂德,张正友.计算机视觉-计算理论与算法基础[M].北京:科学出版社,1998.
[7]刘丽丽,李航.单目视觉的大型零件三维测量方法[J].机床与液压,2014,42(3):121-123.
[8]于乃功,黄灿.基于单目视觉的机器人目标定位测距方法研究[J].计算机测量与控制,2012,20(10):2654-2656.
[9]赵鹏.机器视觉理论及应用[M].北京:电子工业出版社,2011,135-156.
[10]王耀南,李树涛,毛建旭.计算机图像处理与识别技术[M].北京:高等教育出版社,2001:103-106.
猜你喜欢
中国海洋平台(2022年5期)2022-11-01
房地产导刊(2022年4期)2022-04-19
海洋通报(2020年2期)2020-09-04
海洋通报(2020年2期)2020-09-04
中国惯性技术学报(2019年1期)2019-05-21
中国航海(2018年1期)2018-05-07
北京航空航天大学学报(2017年4期)2017-11-23
世界海运(2017年10期)2017-10-19
光学精密工程(2016年4期)2016-11-07
中国水利(2015年4期)2015-02-28