
悬镜法地铁竖井联系测量技术的研究
2015-11-25 00:39王玉振王建华陈献军
铁道标准设计 2015年8期
王玉振,王建华,陈献军
(1.河南水利与环境职业学院,郑州 450011;2.中铁七局集团有限公司,郑州 450016;3.中铁工程设计咨询集团有限公司郑州设计院,郑州 450001)
悬镜法地铁竖井联系测量技术的研究
王玉振1,王建华2,陈献军3
(1.河南水利与环境职业学院,郑州 450011;2.中铁七局集团有限公司,郑州 450016;3.中铁工程设计咨询集团有限公司郑州设计院,郑州 450001)
重点研究地铁隧道控制测量中的竖井联系测量,通过在地铁竖井联系测量中首次采用悬镜法并结合后方交会法的实施,从理论分析并结合工程实践,得到精度更高的联系测量点位精度。进而研究寻找出一套操作简单、高精度、切实可行的地铁竖井联系测量的方法,并可为类似工程提供借鉴。
地铁;悬镜;竖井联系测量;后方交会
1 概述
地铁竖井联系测量精度不高是施工中有待解决的问题。由于盾构法一次成型,且随着地铁区间增大(2 km以上),传统的全站仪直测式和垂线式(导线式)越来越难满足竖井联系测量精度要求[1]。采用钢丝加可旋转棱镜的悬镜法进行竖井联系测量(国内同类工程的首次),不仅操作上更加简单,而且提高了竖井联系测量中的投点精度,结合在地面联系测量中采用精度更高的多站点后方交会的测量方法,使得竖井联系测量的点位精度得到根本性改善。
2 工程概况
郑州市轨道交通2号线工程向阳路站—南四环站区间线路从向阳路站出发,沿紫荆山南路向南穿越站马屯民房区后下穿南水北调干渠工地以及施工完成的石武贯通客运专线桥梁后到达南四环站。区间左线盾构区间长度为2045.813 m,右线盾构区间长度为2047.239 m。盾构机从向阳路站南端头始发,经区间风井至南四环站北端盾构吊出井吊出,盾构接收井及明挖区间采用明挖法施工。
3 方案实施
3.1 常规导线联系测量方法
常规联系测量采用导线垂线式投点法。在向阳路站地面上埋设4个近井点Q1、Q2、Q3、Q4,在底板上埋设4个控制点T1、T2、T3、T4构成闭和导线,如图1所示。通过近井点Q1、Q2经盾构井中悬吊的钢丝D4及底板上的T1、T2、T3、T4和盾构井中悬吊的钢丝D1回到Q3、Q4点,可得点T1、 T2、T3、T4方位角和坐标。
3.2 本方案联系测量方法
为保证近井控制点的精度,减少对中误差对地面控制点的影响,在向阳路车站基坑外侧设置强制4个对中墩(K1、K2、K3、K4),测量时采用四边形精密平面控制网,如图2所示。本方案使用自主研发的悬镜(已申报专利,见图3)。棱镜分为棱镜框、棱镜、旋转三部分组成,悬镜框采用高强度铝合金制作,能承受500 N拉力,棱镜采用德国原装SIN棱镜。旋转部分保证棱镜偏离观测方向时能够做微小调整,上、下两棱镜中心偏差小于0.3 mm,见图4,有效避免了传统贴片因测距、测角不准而带来的投点精度的损失,使竖井联系测量从根本上减弱偶然误差。

图2 精密平面控制网

图3 悬镜
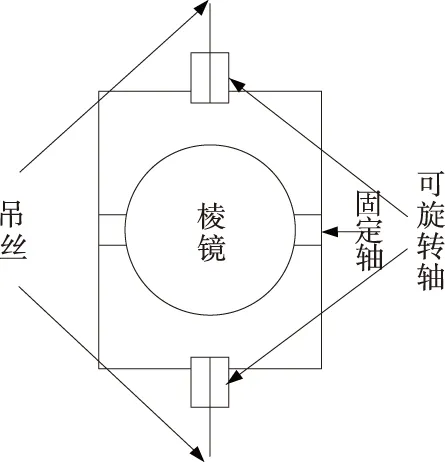
图4 悬镜安装示意
制作垂线采用φ0.5 mm钢丝,钢丝中间不能有打死结、拧劲、破损等现象。钢丝与棱镜框的连接部分采用打死结的方式,防止脱落,钢丝穿过棱镜框可旋转部位时,钢丝打的死结要陷入穿线孔内以保证钢丝中心线与棱镜中心线重合。钢丝下部配10 kg重锤放入油桶中,油的液面要漫过重锤,利用油的阻力防止钢丝旋转摆动。根据规范要求[2],对联系测量须使用高精度全站仪,全站仪的测角精度不得大于± 0.5″;测距精度不得低于±1 mm+1 ppm。为保证测距精度,棱镜常数由省测绘局仪器检测部门测定出来后进行仪器改正。全站仪带目标自动搜索及照准目标(ATR)的功能。上述做法以保证测角、测边的精度。
向阳路站盾构机吊出井及出口为竖井联系测量位置,设置6个联系测量钢丝悬镜,在每根钢丝合适的位置固定上、下2个高精度可旋转棱镜,利用0.5″,1 mm+1 ppm全站仪进行后方交会测量,利用专业测量软件对近井点与棱镜进行联合平差,得出点位精度优于1 mm的钢丝上的棱镜坐标。井上联系平面控制网的施测实行自由建站的后方交会的方式进行,每站观测4~6个目标,每站3个测回,测量时应保证每个点至少在不同的测站上被测量2次以上,每测站重复观测多于2个的目标观测点,每测站观测距离不大于150 m,相邻两测站距离不大于120 m。外业观测技术指标见测量规范[3]。
4 精度分析
4.1 常规导线联系测量方法
常规竖井联系测量中采用导线测量,投点方式为垂线加贴片。建立模型如图5所示。
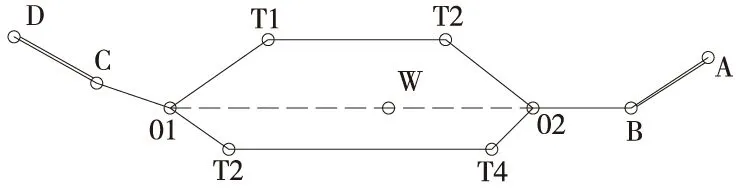
图5 导线测量示意
取1 km长导线为单位权长度,导线平均边长约70 m。于是最弱点W的权为PW=47.6×2=95.2 单位权中误差计算公式为
(1)
式中,n为单位权长度导线边数;ms为测边偶然误差;λ测边系统误差;L为单位权导线闭合边长度;mβ为测角中误差,规范规定的测角中误差mβ=2.5″。
最弱点W的点位误差为
(2)
4.2 悬镜法竖井联系测量精度分析
外业采用自由建站多站边角后方交会技术,强制对中方法作业。洞内地下控制网根据向阳路站底板控制点为控制测量的起算依据(T1、T2、T3、T4、)。T1、T3为起算点,左线延伸控制网XZ1、XZ2、XZ3……延伸到掘进面。后返回,通过转点回到站内T2、T4做附和导线(图6)。隧道内部使用强制对中观测点。强制对中点设在已成隧道的管片侧壁上,距地面1.5 m左右;每隔80 m设置一对强制对中点,左右对称。施测时采用Leica全站仪、原装精密对中棱镜底座、原装进口高精度专业棱镜。洞内平面控制网施测采用自由设站的后方交会法,每站观测3对目标,每站3测回,保证每个点至少在不同的测站上被测量3次以上,每测站重复观测多于3个的目标观测点,每测站观测距离不大于150 m,相邻两测站距离不大于120 m。详见图7。控制网的段落搭接时受各种因素的影响必然存在偏差,为了消除这种偏差或者将这种偏差降到最小,在进行控制网的测量时必须在段落搭接的地方进行重复观测,一般重复观测的测站数不应少于1个测站。

图6 地下洞内控制网布设示意

图7 地下洞内平面控制网详图示意
在地铁洞内平面控制测量中,目标点采用强制对中方式结合自由建站多站点边角后方交会测量方法施测,可以达到较高的贯通点位精度。尤其对长大地铁隧道(2 km及以上)掘进控制具有明显的优势[10]。
(1)测角精度
水平角观测采用Leica全站仪(0.5″,1+1 ppmD),3测回观测。水平角观测的误差来源主要如下。
照准误差:ms=±60/V=±60/32=±1/1.9″,V为望远镜放大倍率。

目标照准差:me=±(0.3/100 000)×206 265″=±0.6″,按悬镜最大偏心0.3mm、边长100m计。
半测回方向中误差
(3)
本方案中水平角观测3测回,则中误差为:mβ=±1.3″。
(2)测边精度
边长测量作3测回观测(边长按100 m计算),测距精度: 1+1×0.1=1.1 mm
(3)测站点点位精度

(4)
(5)
已知点误差对于常规方法和本方案没有区别,所以不考虑已知点误差。按照误差传播定律可得
(6)
取SA=SB=100 m,SAB=200 m,mγ=±1.3″,mSA=mSB±1.1(mm)代入上式,解之,得
mXO=±1.3(mm); 同理得mYO=±1.3(mm)


图8 自由建站示意
(4)悬镜点点位精度分析

(7)
取SB=100 m,SAB=200 m,mr=±1.3″,mSB=±1.1(mm)代入上式,解之,得:mαAO=±0.6″
由αOP=αAO+180°+θ可知
(8)
用mαOP=±0.6″,mθ=±1.3″代入上式,得mαOP=±1.4″
XP=XO+SP·cosαOP,自由建站不考虑测站点误差,按照误差传播定律可得
(9)
取mXP、mαOP、SP代入上式,得:mXP=±1.3(mm);同理,mYP=±1.3(mm)



由此可见,用常规导线进行竖井联系测量时,理论分析点位误差值为2.9 mm;而本方案的利用悬镜、自由建站、后方交会的方法得到的联系测量点位误差为1.2 mm。由此可以看出,利用本方案在投点精度上比常规导线测量提高了近3倍。
5 实测对比分析
通过比较悬镜法与常规导线法不同的联系测量方法取得的成果资料,获得高精度联系测量点位坐标。
5.1 导线法联系测量坐标资料成果及点位精度
在施工现场运用导线法进行了联系测量,测量结果见表1。其中XJ1-1、XJ5-1为已知点,Q1、Q2、Q3、Q4为地面近井控制点,D1、 D4为钢丝贴片点。
5.2 悬镜法联系测量坐标资料成果及点位精度
按照既定方案,在向阳路车站运用悬镜结合后方交会的测量方法,实测出联系点的棱镜坐标,并平差进行了点位精度评定。其中G1、G2为悬镜点;K1、K2、K3、K4为近井强制对中控制点。见表2、表3。
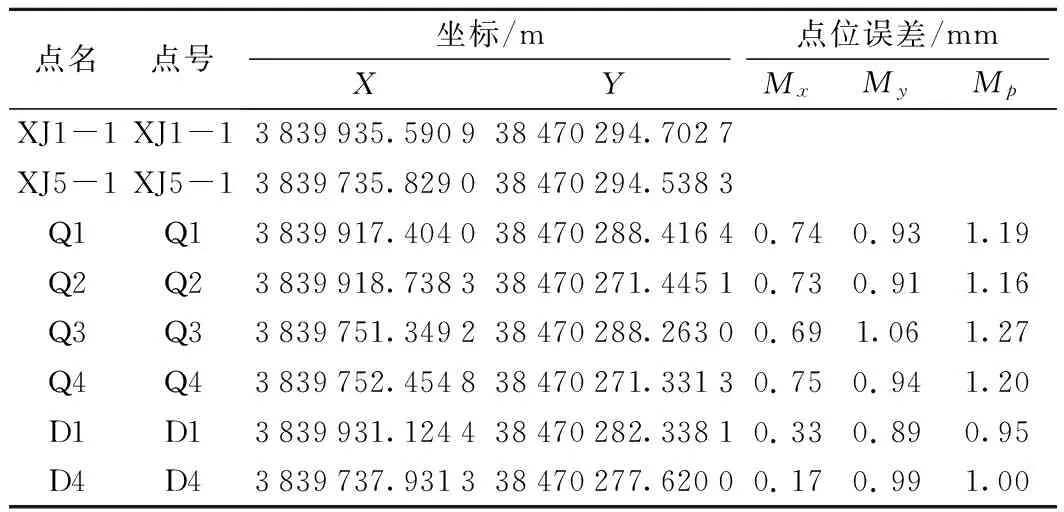
表1 导线联系测量成果资料
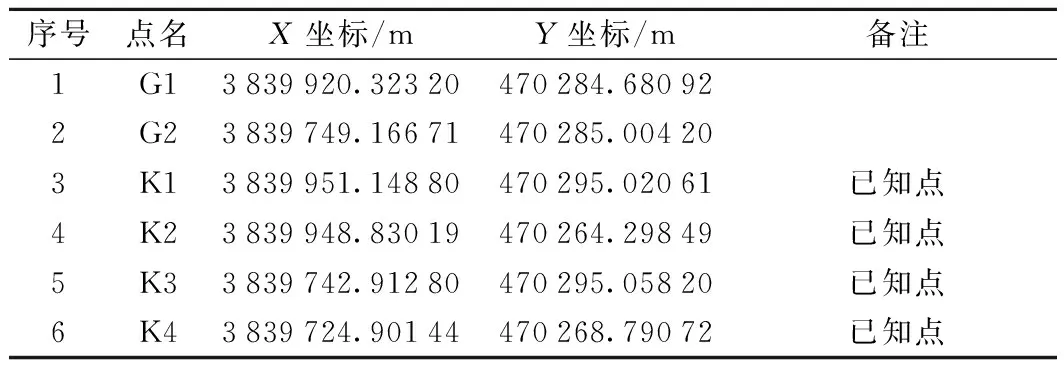
表2 悬镜法联系测量成果资料

表3 悬镜法联系测量点位精度
5.3 两种测量方法精度对比分析
通过悬镜法联系测量成果资料(表2、表3)与导线联系测量成果资料(表1)对比可以看出:在悬镜法中吊点最大点位误差为点G1,其横向点位中误差为0.30 mm,点位误差为0.37 mm;而在钢丝贴片成果表中吊点最大点位误差为点D4,其横向点位中误差为0.99 mm,点位误差为1.00 mm。通过对比说明采用悬镜法进行竖井联系测量精度更高,更具可靠性。同时也与理论分析的悬镜法比常规导线法精度提高近3倍的观点相对应。
6 结语
通过对测量点位理论精度和实测值对比分析,总结出了一套操作简单、精度高、切实可行的地铁竖井联系测量的方法,结论如下。
(1)钢丝加可旋转棱镜的悬镜法进行竖井联系测量,不仅操作上更加简单,而且点位精度比常规导线点位精度提高近3倍,联系测量点位精度大大提高。
(2)地上联系测量采用后方交会,每个投点保证被观测3次。大大提高联系测量的投点精度,保证了每个投点的点位中误差优于1 mm。
(3)地下洞内目标点采用强制对中方式结合自由建站多站点边角后方交会测量方法施测,可以达到较高的贯通点位精度,尤其对长大地铁隧道(2 km及以上)掘进控制具有明显的优势。
(4)在测量中点与点之间不需要通视,减小了对施工进程的干扰,有力保证了各施工环节有序开展。
[1]全站仪竖井联系测量的平差计算原理及其精度分析[J]. 铁道勘察,2010,36(3):17-20.
[2]TB10601—2009高速铁路工程测量规范[S].北京:中国铁道出版社,2009.
[3]GB50026—2007工程测量规范[S].北京:中国建筑工业出版社,2007.
[4]GB50308—2008城市轨道交通工程测量规范[S].北京:中国建筑工业出版社,2008.
[5]TB10121—2007铁路隧道监控量测技术规程[S].北京:中国铁道出版社,2007.
[6]GB50157—2013地铁设计规范[S].北京:中国铁道出版社,2013.
[7]陶本藻.误差理论与测量平差[M].武汉:武汉大学出版社,2012:45-50.
[8]隋立芬.误差理论与测量平差基础[M].北京:测绘出版社,2001:87-89.
[9]姬晓旭,刘成龙,何波.竖井联系测量的新方法及其应用[J].铁道勘察,2009(5):14-17.
[10]王玉振,王建华.郑州地铁控制测量工程实践[J].测绘与空间地理信息,2014,37(9):178-180.
[11]陈光金,付宏平.铁路隧道洞内CP域导线测量与复测精度指标合理性探讨[J].铁道标准设计,2014(4):65-69.
Research on Suspended Mirror Method in Subway Shaft Connection Survey
WANG Yu-zhen1, WANG Jian-hua2, CHEN Xian-jun3
(1.Henan Vocational College of Water Conservancy and Environment, Zhengzhou 450011, China; 2.China Railway NO.7 Bureau Group Co., Ltd., Zhengzhou 450016 China; 3.Zhengzhou Design Institute of China railway Engineering Consulting group Co., Ltd., Zhengzhou 450001, China)
This paper focuses on the shaft connection measurement in subway tunnel control survey. Based on the first practice of hanging mirror method in subway shaft contact measurement with resection, accurate point position is obtained to enable a simple, accurate and practical subway shaft contact measurement method, which can provide
for similar engineering projects.
Subway; Hanging mirror; Shaft connection survey; Resection
2014-11-27;
2014-12-19
中铁七局集团科研计划(12A09)
王玉振(1978—),男,讲师,2007年毕业于信息工程大学测绘学院大地测量与测量工程专业,工学硕士。
1004-2954(2015)08-0140-04
U231+.3
A
10.13238/j.issn.1004-2954.2015.08.030
猜你喜欢
天水行政学院学报(2022年4期)2022-11-18
工业安全与环保(2022年5期)2022-05-17
航天制造技术(2020年4期)2020-09-11
郑州大学学报(工学版)(2020年6期)2020-02-23
学苑创造·A版(2019年4期)2019-05-10
制造技术与机床(2018年12期)2018-12-23
证券市场红周刊(2018年37期)2018-05-14
三联生活周刊(2017年37期)2017-09-11
浙江大学学报(工学版)(2016年10期)2016-06-05
中国水利(2015年6期)2015-02-28
