
基于模糊控制的三级倒立摆系统仿真
2015-11-22 11:07:40李勇泉
大众科技 2015年6期
李勇泉
(国电南瑞科技股份有限公司,江苏 南京 211106)
基于模糊控制的三级倒立摆系统仿真
李勇泉
(国电南瑞科技股份有限公司,江苏 南京 211106)
倒立摆是理想的自动控制试验对象,应用模糊控制方法,研究了三级倒立摆系统的稳定控制问题。通过对系统的线性化模型设计LQR最优控制反馈权阵,并基于最优线性控制的反馈参数选择模糊控制参数。仿真结果表明该方法可实现三级倒立摆系统的稳定控制,具有参数选择简单、动态性能较好等特点。
三级倒立摆;模糊控制;LQR;仿真
1 引言
倒立摆系统是典型的非线性、强耦合、多变量、自然不稳定系统[1]。在控制过程中,它能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪等许多控制中的关键问题,是检验各种控制理论的理想模型。迄今,人们已经利用古典控制理论、现代控制理论以及各种智能控制理论实现了多种倒立摆系统的稳定控制问题,包括LQR算法[2]、模糊控制方法[3]、模糊神经网络方法[4]等。
对于三级倒立摆这样典型的多变量非线性系统,由于变量个数较多,采用模糊控制时,模糊规则的总数呈指数增长,不利用实时处理[5]。通过对多个变量进行融合,对模糊控制器的输入变量进行降维,减小了模糊规则设计难度,同时也提高了系统控制的实时性能。
本文针对三级道理摆系统设计了基于融合结构的模糊控制器,其多变量的融合权重则根据线性化模型的最优线性控制反馈权阵进行选取,该控制方法结构简单,控制稳定,具有较好的收敛性。
2 三级倒立摆系统模型
2.1物理模型
如图1所示,三级倒立摆系统主要是由控制对象、导轨、电机、皮带轮、传动带以及电气测量装置组成。控制对象由小车、一摆、二摆、三摆组成。一摆、二摆、三摆由轴承连接,并且可以在平行导轨铅垂平面内自由转动。

图1 三级倒立摆物理系统结构图
2.2数学模型
对于图 1所示的三级倒立摆系统,为了研究方便,假设如下条件成立:
(a)各部的摩擦力矩与相对速度(角速度)成比例;
(b)皮带轮与传动带之间无滑动,传动带无伸长现象;
(c)一、二、三摆均可视为刚体;
则三级倒立摆系统的非线性动力学模型为:

其中,各个参数的含义可参考文献[2]。
3 模糊控制器
3.1模糊控制器结构设计
采用融合方法,为三级倒立摆系统设计模糊控制器,将8个输入变量分为直接量和微分量两组,并融合成 2个变量,其结构如图2所示:

图2 三级倒立摆系统的模糊控制器结构图
3.2模糊控制器参数设置
针对上述结构的模糊控制器,设置参数如下:
(1)确定输入输出论域
对于E和EC的论域,可以都选取为[-1,1],Y的论域也选为[-1,1]。
(2)确定变量的语言值与隶属度函数
对于E、EC和Y,均选取7个语言值,分别记为NB、NM、NS、ZE、PS、PM、PB。并采用“trimf”隶属度函数,其中心值与边界值采用Matlab默认的均匀分布情况。
(3)确定模糊规则
按照线性融合的原则,设计的模糊规则如表1所示。

表1 三级倒立摆模糊控制器的模糊规则表
(4)确定增益参数(融合因子、量化因子和比例因子)
可根据系统的线性化模型设计对应的最优状态反馈阵K=[k1,k2,k3,k4,k5,k6,k7,k8],可以设定K00=5,相应可求得增益参数如下:K1=k1/K00,K2=k2/K00,K3=k3/K00,K4=k4/K00,K5=k5/K00,K6=k6/K00,K7=k7/K00,K8=k8/K00,K0=-2K00。
采用最优二次型性能指标,取Q=diag(10,100,1000,10000, 0,0,0,0)和R=1,采用Matlab中lqr()函数,可得到最优线性控制反馈系数阵为K=[-3.1623,-57.2348,300.8179,-383.7509, -11.5829,-3.8366,5.3233,-51.9479]。从而可确定模糊控制器的融合因子为:K1=-0.6325,K2=-11.4470,K3=60.1636,K4=-76.7502,K5=-2.3166,K6=-0.7673,K7=1.0647,K8=-10.3896,同时也可确定量化因子为:KE=1,KEC=1;比例因子为:KU=-10。
(5)确定模糊推理方法
采用Mamdani模糊推理方法。
(6)确定解模糊方法
采用重心法(COG)解模糊。
4 仿真实验与结果分析
基于Matlab环境,对三级倒立摆模糊控制系统进行仿真,其初始化程序代码如下所示:
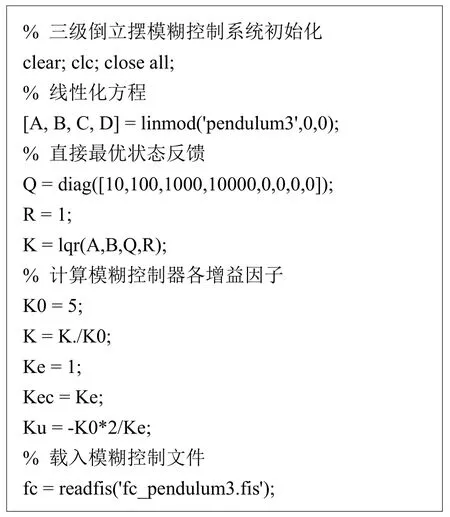
设定系统初始状态为X=[0.05, 0.08, 0.001, 0.008, 0, 0, 0, 0],仿真运行三级倒立摆模糊控制系统模型,结果显示线速度和三个角速度最后都为0。位置曲线如图3所示,可以看出,三级倒立摆系统在模糊控制器控制下,最终停在位移为0、摆杆1角度为0、摆杆2角度为0、摆杆3角度为0的位置,摆杆稳定竖直,控制效果良好。

图3 三级倒立摆模糊控制仿真结果
下面进一步分析量化因子和比例因子对模糊控制器控制效果的影响。由于上述模糊控制器是通过线性状态反馈控制器计算得到的,为了保持控制量对状态量的近似线性关系,可以在下述约定条件下改变量化因子和比例因子的值:
(1)KE=KEC;
(2)KEKU=2K00=-10;
因此只要确定KE、KEC、KU其中某一项,其他两项也就确定了。
当KE=1时,查看模糊控制器的输入端E和EC,可以发现E的峰值为-0.1和0.6,而EC的峰值为-0.02和0.18。故可以增大量化因子的取值,使输入变量覆盖控制器论域范围。结果表明当 KE=1.5时控制系统仍然处于稳定状态。而当KE=4时,控制系统的输出呈现发散状态,系统不稳定,如图4所示。因此,当KE的范围为1~1.5时可获得稳定快速的控制效果。

图4 模糊控制仿真位置曲线(KE=4)
5 结论
本文应用模糊控制方法,研究了三级倒立摆系统的稳定控制问题。通过对系统的线性化模型设计 LQR最优控制反馈权阵,并基于最优线性控制的反馈参数设计模糊控制参数,仿真结果表明该方法可实现三级倒立摆系统的稳定控制,这种模糊控制器的设计方法也可以应用到其他多变量、非线性系统的控制问题中。
[1] 孟巧荣,廉自生.倒立摆控制系统的建模与仿真[J].机械工程与自动化,2004,(2):7-9.
[2] 李宇成,朱兴,郑兴凯,等.基于 LQR算法的三级倒立摆控制系统的仿真研究[J].北方工业大学学报,2006, 18(3):35-40.
[3] 楼顺天,胡昌华.基于MATLAB的系统分析与设计——模糊系统[M].西安:西安电子科技大学出版社,2001.
[4] 崔桂梅,宏晓英,秦力舒,等.状态变量合成的三级倒立摆模糊神经网络控制[J].控制工程,2004,11(1):36-38.
[5] 曲建岭,吴文海,孙俊恩.三级倒立摆系统模糊控制器设计及仿真[J].系统仿真学报,2004,16(3):578-588.
Triple inverted pendulum system simulation based on fuzzy control
Inverted pendulum is an ideal experimental object in automatic control area. The paper uses fuzzy control method to study the stability controlling problem of triple inverted pendulum system. The LQR optimal control feedback weight matrix is designed through the system’s linearizing model, and the feedback parameters for optimal linear control are used to decide the fuzzy controller parameters. Simulation results show that the proposed method can achieve the stability control of triple inverted pendulum, and it has a simple parameter selection with a good dynamic performance.
Triple inverted pendulum; fuzzy control; LQR; simulation
TP273
A
1008-1151(2015)06-0007-03
2015-05-11
李勇泉(1987-),男,江苏无锡人,国电南瑞科技股份有限公司助理工程师,从事电气自动化工作。
猜你喜欢
小学生学习指导(高年级)(2021年4期)2021-04-29 02:17:10
河北理科教学研究(2020年2期)2020-09-11 06:15:48
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
数学年刊A辑(中文版)(2015年2期)2015-10-30 01:56:14
电源技术(2015年11期)2015-08-22 08:50:38
新高考·高二数学(2014年7期)2014-09-18 00:42:02
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
