基于局部特性的月球撞击坑边缘处理方法研究
2015-11-22 03:15:56蒋先刚胡玉林胡传秀张盼盼
华东交通大学学报 2015年1期
蒋先刚,胡玉林,胡传秀,张盼盼
(华东交通大学理学院,江西 南昌330013)
撞击坑是月球表面最明显也是最重要的特征,对撞击坑、月海和高地等典型月貌的影像特征的检测与识别是探月工程数据处理环节中亟待解决的一个关键问题,这将极大提高月球地貌的标记和分析速度,可以准确地推断月球表面的相对地质年龄和地表特性,这些技术还可以用于航天器导航的定位和障碍物躲避等。而撞击坑边缘及其区域纹理是其重要的特征之一,因此,对月球撞击坑图像进行边缘处理是必要的[1-3]。当前很多撞击坑边缘处理都是基于撞击坑呈现出半圆月牙状的高亮和阴影对区域,这些撞击坑识别方法对光照条件有较大的依赖,其识别效率受到一定的影响。本文主要讨论用各向异性扩散、面积属性形态学等技术对撞击坑的影像进行预处理,着重研究依局部区域分布属性而对多向Sobel 算子进行加权处理的月球撞击坑的算法,在突出月球撞击坑的边缘特征的基础上,使弱边界的边缘同时得到加强[4-6]。经过实验证明依此处理的边缘特征的撞击坑分类方法使其识别系统具有很好的鲁棒性。
1 兼顾各向的月球撞击坑边缘处理方法
月球撞击坑在不同纬度和光照条件下及本身的坑的深度和风化时间的影响下,呈现出不同的局部影像边缘特征,但适宜的边缘处理将使不同光线方向的阴阳月牙对撞击坑和较浅模糊撞击坑都表现为较为稳定的圆形边缘特性。
假设连续图像函数为f(x,y),函数在(x,y)处的灰度变化用一个具有方向和大小的梯度矢量表示:

式中:i,j分别为x,y方向的单位矢量。基于梯度的算子f(x,y)处的边缘梯度幅度和方向分别定义为

而计算出的梯度幅度为图像的边缘响应值,考虑到采集的图像为一定像素区域的离散数据而用相邻或间隔像素的差分值来代表图像的边缘信息,而方向表示梯度变化最大的方位,经典的2向Sobel算子主要涉及水平和垂直两个边缘方向信息,而撞击坑的边缘是多方向的,考虑阳光入射角的不同等各种因素而要进行多向边缘兼顾。为了更全面地加强撞击坑的边缘,采用多向的Sobel算子进行卷积运算而得到边缘图像,各向算子是兼顾0°,45°,90°,135°,180°,225°,270°,315°这8个方向的模板,窗口为3×3尺度的Sobel算子模板如下所示。
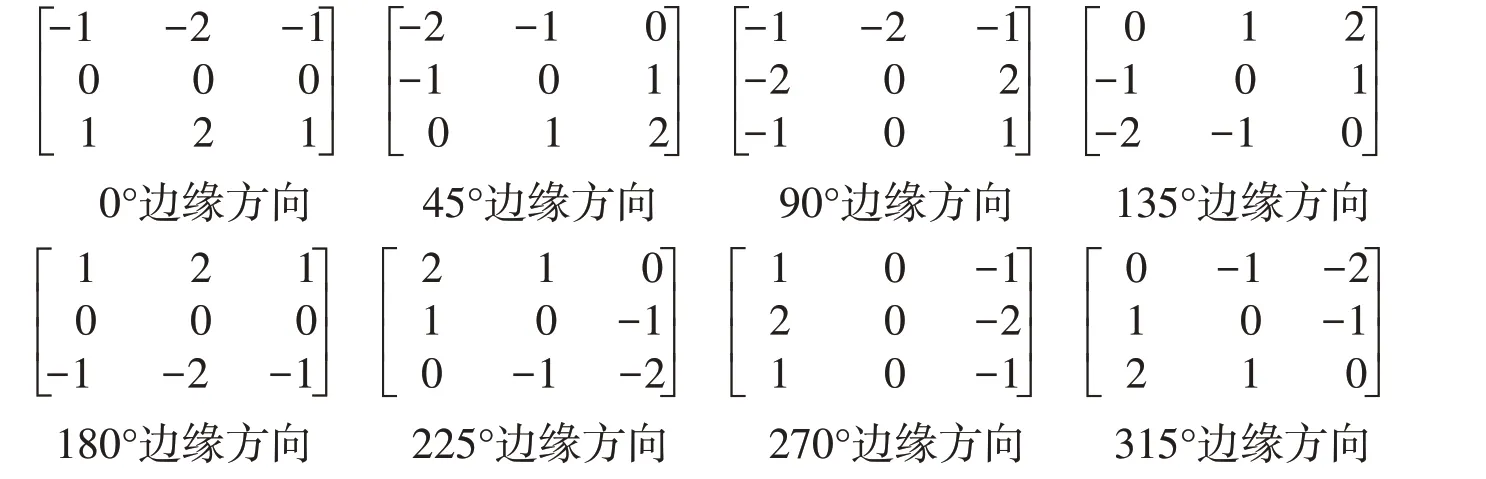
图1是各向Sobel边缘算子对细胞和撞击坑边缘处理效果的比较。从图(b)到图(d)中可以看出,随着兼顾方向数的增加,更多方向的边缘信息得到保留和增强,而8方向的Sobel算子对月球撞击坑的影像的边缘处理效果更加明显,且其边缘特性基本上不受撞击坑是否包含阴阳月牙对、阳光入射角大小和坑深的影响而表现为较为稳定的状态。
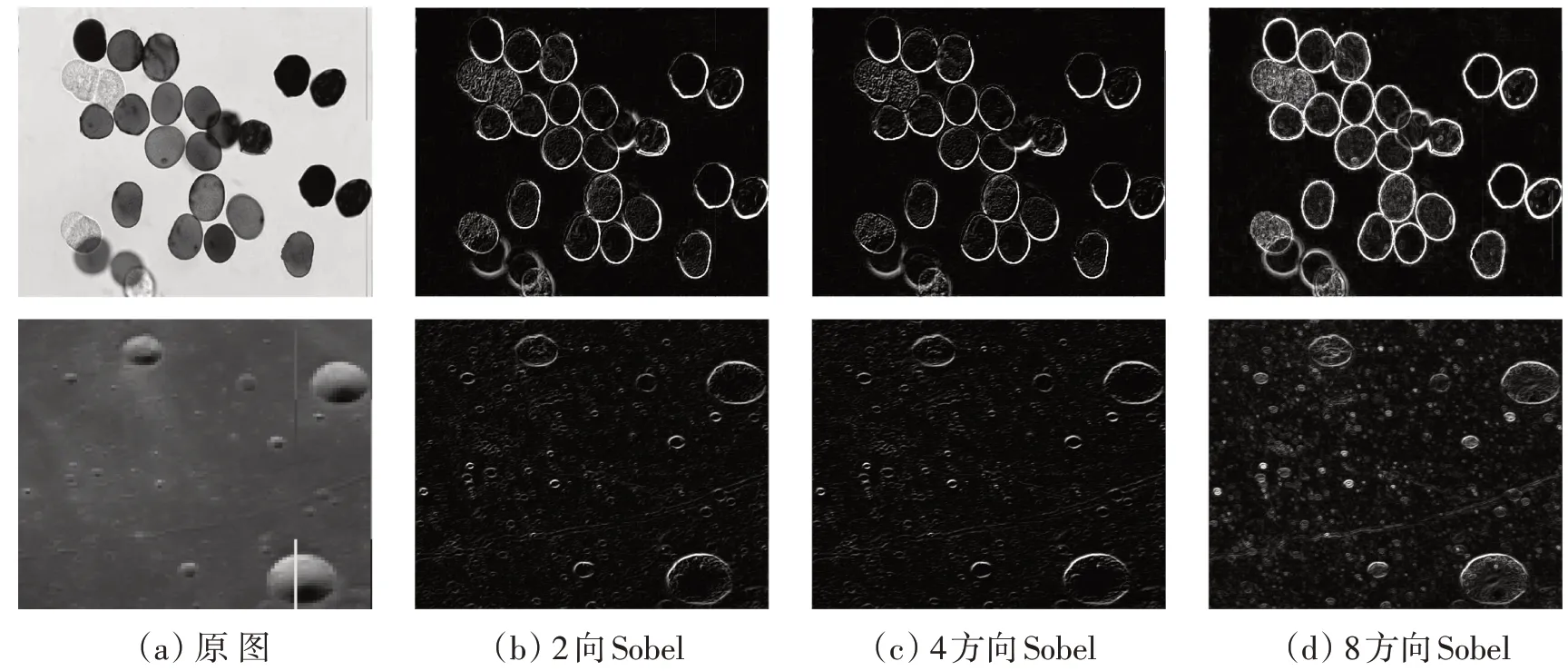
图1 各种方向Sobel算子边缘处理效果比较Fig.1 Treatment effect comparison of Sobel operator edge at each direction
2 各向Sobel算子对月球撞击坑图像边缘的综合处理
2.1 基于各向异性扩散平滑的各向Sobel算子对撞击坑的边缘处理
在非线性尺度空间,根据图像不同方向上的梯度确定扩散系数,其平滑噪音和保留细节的功能都得到发挥,扩散方程定义如下:

式中:div为散度算子;u为图像像素的灰度值;▽u表示梯度;c是扩散系数,是图像梯度▽u的非负单调递减函数,考虑到快捷性和稳定性,采用的扩散系数为

式中:k为控制扩散强度的系数。各向异性的扩散方程对于不同方向采取不同的扩散系数,它采用了图像在不同方向上的梯度的单调递减函数作为扩散系数。在图像梯度较小的同质区域内部,取较大的扩散系数以平滑区域内的噪音,而在图像梯度较大的边缘区域,取较小的扩散系数以保留图像的边缘信息。
各向异性扩散有效地平滑噪声和保持边缘信息。图2是4向、8向各向异性扩散的各向Sobel算子处理效果比较。图2(b),(c),(d)是对撞击坑图像进行了4向各向异性扩散平滑滤波的基础上再分别进行各向Sobel算子边缘处理;图2(f),(g),(h)是对撞击坑图像进行了8向各向异性扩散平滑滤波的基础上再进行各向Sobel算子边缘处理,显然经过8向各向异性扩散和8向Sobel算子边缘加强将后的图片完整地保留了撞击坑边缘。

图2 各向异性扩散平滑后的各向Sobel算子处理效果比较Fig.2 Treatment effect comparison of differently-oriented Sobel operator preprocessed by anisotropic diffusion
2.2 基于属性形态学的各向Sobel算子对撞击坑的边缘处理
属性数学形态学是采用柔性可变的结构元素度量和提取不同灰度层次的连通区域以对图像进行滤波和特征提取的方法【7】。ψ为灰度面积重构开操作,f,g为图像定义于离散空间域D、值域V={0,1...,N- }1 上的两个函数,且f≤g,则∀p∈D,f(p)≤g(p),g为掩模,f为标识,对于指定面积阀值S,可得到面积重构开操作

对于一维信号的灰度重构滤波,其中,取输入信号g为掩模,取标识为f=g-S,面积重构的结果是滤除了波形的尖峰干扰,即按一定属性准则消除尖峰,与固定结构的数学形态学相比较,它在对信号侧轮廓或连通区域轮廓不消弱的情况下则具备滤除面积小于阀值的低灰度像素的优点。通过采用最大树结构将灰度图像按灰度等级和属性构成整幅图像的结构树,树的叶子就是表达一定灰度等级和一定属性(如面积)的连通域,树的叶子一般是灰度值较大的区域,树的根是图像的黑色背景。通过剪除Subtract等方法按连通域面积、形状等属性准则修剪这棵图像树,然后将修剪后的树进行重构就可得到经该方法滤除噪声后的图像。
如采用面积属性形态学结构开操作,设定面积准则是S=200,则在任意灰度等级的一个任意形状连通域面积小于200的区域将被它下一灰度值层次的周围邻域融合或者修剪掉,由于邻近灰度层次的区域融合或修剪使滤除噪声后的图像在视感上没有突变的感觉而表现自然和平滑,且由于它的结构元素是柔性的任意形状,对任意等级的灰度连通域都不会造成边缘损失。灰度面积重构闭是对函数g 作用于图像的补集的一个重构开操作,它将滤除掉面积小于阀值的高灰度像素。面积属性形态学的重构开、重构闭(AOC)共同作用将修剪掉较亮和较暗的不同灰度等级上的面积小于属性准则的连通域。图3是在面积Power 阀值=20和面积Power 阀值=200的准则下的面积属性形态学滤波后图像再经过各向Sobel 处理效果的比较,大的面积阀值将使小面积连通域噪声得到滤除。
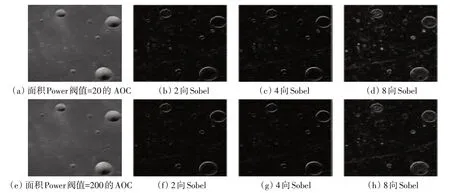
图3 依面积属性形态学处理后的各向Sobel算子处理效果比较Fig.3 Treatment effect comparison of differently-oriented Sobel edge preprocessed by area attribute morphology
2.3 基于加权多向Sobel算子对撞击坑的边缘处理
若将当前被处理像素的N×N邻域的灰度均值、最小值、最大值、方差、熵等属性综合考虑,将会使伪边缘信息和噪声得到剔除,使物体有效的边缘和弱边缘得到加强[8-10]。为了全面地反映这个区域内线状边缘上的点的属性,用Sigmoidal函数表达其统计值间的平滑拉伸与过渡的关系,对于一个待检测点及其它的邻域R,该点对8向Sobel算子卷积的权重函数表达为

图像边缘滤波的最终响应值为

图4是经权重调整的8向Sobel及相应前平滑处理的综合效果比较图。通过比较分析可知,非加权的8向Sobel在背景和目标的灰度差比较小的区域的轮廓仍不能有效获得,小的噪声点仍然以边缘形式出现,加权8方向过滤能有效消除伪边缘的噪声,在进行8向各向异性扩散平滑滤波的预处理的基础上再进行加权8方向Sobel边缘处理对影像边缘处理效果更加明显,可以更好地呈现细胞或者月球撞击坑的圆形边缘,还可以更好保持图像弱边缘,能较好地保持图像的重要细节,在经过面积阀值的AOC属性形态学处理后的去噪图像具备自然清晰的目标与背景对比,而经加权8向Sobel处理将获得包括弱边缘加强的8向圆形边界。当处理模板窗口尺寸从3×3增加到5×5,7×7时,消除小尺度伪边缘的能力更强。
3 结束语

图4 各种平滑与加权8向Sobel算子的综合处理效果Fig.4 Comprehensive treatment effect of Sobel operator of each smoothing and weighted 8 direction
提出了依局部特性而自适应调整多向Sobel算子权重的月球撞击坑边缘处理方法,并结合具平滑和边缘保持双重特性的8向各向异性扩散和面积属性形态学的平滑预处理,获得较为稳定的撞击坑的图像边缘属性,通过依像素点区域的灰度统计分布值调整的权重函数而可获得反映本质的边缘信息,在此基础上获取的梯度方向直方图HOG和圆形Hough变换的边缘特征具备较高的特异性和稳定性。下一步的研究重点是如何提高系统对不同图像质量和多种形态的月球撞击坑的适用性,以及怎样提高机器学习算法的识别性和鲁棒性,并探索如何使用面向对象法为月球撞击坑建立几何和影像的特征库。
[1] SALAMUNICCAR G, LONCARIC S, PINA P, et al.MA130301GT catalogue of Martian impact craters and advanced evaluation of crater detection algorithms using diverse topography and image datasets[J].Planet.Space Sci, 2011,59(1):111-131.
[2] 刘茜,卢心红,李象霖.基于多尺度Retinex的自适应图像增强方法[J].计算机应用,2009,129(8):2077-2079.
[3] 蒋先刚,蒋兆峰,盛梅波,等.基于局部Haar和PHOG特征的月球撞击坑综合检测方法[J].中国科学,2013,28(3):324-329.
[4] 吴炯,张秀彬,张峰,等.数字图像中边缘算法的实验研究[J].微计算机信息,2004,20(5):106-107.
[5] 沈峰亭,魏红.基于改进Sobel算子的螺纹边缘检测[J].微计算机信息,2008,24(1):261-262.
[6] 李捷,唐星科,蒋延军.几种边缘检测算法的比较研究[J].信息技术,2007,34(4):106-108.
[7] 汪林林,杨帆,王佐成.自适应多方向模糊形态学边缘检测算法[J].计算机应用与研究,2009,26(3):1177-1179.
[8] 崔建军,詹世福,郑雄伟,等.一种改进的边缘检测算法[J].测绘科学,2009,34(4):55-56.
[9] 郑秀清,何坤,周激流.图像局部方向均值边缘检测算法[J].电子科技大学学报,2011,40(5):759-764.
[10] 蒋先刚,熊娟,丘赟立,等.基于Hessian特征的视网膜图像的增强滤波算法[J].华东交通大学学报,2013,30(3):37-43.
猜你喜欢
军事文摘(2022年12期)2022-07-13 03:11:44
飞碟探索(2022年1期)2022-03-12 14:11:20
军事文摘(2021年18期)2021-12-02 01:28:54
数学物理学报(2021年2期)2021-06-09 08:54:26
应用数学(2020年2期)2020-06-24 06:02:44
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
数学物理学报(2016年3期)2016-12-01 05:36:27
中国继续医学教育(2015年2期)2016-01-06 01:36:16
少儿科学周刊·儿童版(2015年3期)2015-06-17 04:01:41
振动、测试与诊断(2014年6期)2014-03-01 01:14:50