一种新型浮动量可调的行星齿轮均载浮动机构及方法
2015-11-21 03:26柯永胜
橡塑技术与装备 2015年16期
柯永胜
(武汉大学,湖北 武汉 430072)
一种新型浮动量可调的行星齿轮均载浮动机构及方法
A newf oating amountadjustable planetary gear average load f oating mechanism and methods
柯永胜
(武汉大学,湖北 武汉 430072)
在现有行星齿轮均载机构分析比较的基础上,介绍了一种新型的新型浮动量可调的行星齿轮均载浮动机构及方法,通过介绍其主要过程来解决现有技术所存在的技术问题。实验证明该结构具有如下优点:结构简单,体积小,可以实现齿轮间隙的有级调节,从而实现太阳轮浮动量的连续调节。
锥形齿轮;均载机构;浮动量
行星齿轮传动装置之所以具有体积小、重量轻、承载能力高等优点,主要在于结构上利用了多个行星轮平均分担载荷,形成功率分流,并且合理的利用内啮合,因此行星轮间载荷均衡分配。实现行星齿轮之间的载荷均匀分担有两个方案,一是提高齿轮、行星架等主要零件的加工及安装精度,但由于受设备、工艺、成本等诸多条件的限制,一般条件很难达到,而且很不经济。二是从结构设计上采用“均载机构”,使得传动装置在工作的过程中,各构件之间能够自动补偿各种误差,从而达到受载均衡,它是比较简单经济的均载方法,均载机构是目前行星齿轮传动比较简单经济的均载方法。
然而目前均载机构在以下集中:太阳轮浮动、行星架浮动、内齿圈浮动、太阳轮与行星架同时浮动、太阳轮与内齿圈同时浮动、无多余约束的浮动、行星轮游牧浮动、杠杆联动浮动、柔性均载浮动。缺少一种能够测试外力载荷不同时的最佳浮动量的一种均载机构。故需要单独设计一个能够调节齿侧间隙的齿轮均载机构。
1 锥形齿轮均载机构
一种浮动量可调的行星齿轮均载浮动机构,包括行星架(6)、挡板(9)、垫片(3)、中心轴(1)和位于行星架(6)和挡板(9)之间的太阳轮(5)和行星轮(7);所述行星架(6)和挡板(9)通过螺钉(10)连接;所述中心轴(1)的一端通过滚动轴承与行星架(6)连接,另一端穿过挡板(9)的中心;所述太阳轮(5)和行星轮(7)为锥形齿轮,太阳轮(5)的大头端与行星轮(7)的大头端方向相反且相互啮合;所述垫片(3)套在中心轴(1)上,且位于太阳轮(5)的两侧。
所述中心轴(1)上靠近行星架(6)一端设置有轴肩(11)。所述太阳轮(5)与中心轴(1)通过轴上平键(4)连接,且中心轴(1)上的键槽的长度长于齿轮的厚度。所述行星轮(7)数量为3个,行星轮(7)中心点通过平键(8)固定在行星架上。所述垫片(3)的数量为2片以上,所有垫片的大小和厚度完全一致。
根据图1所示,本发明中太阳轮左侧直接套上垫片,中心轴左侧上有轴肩、左侧垫片通过轴肩跟太阳轮定位,然后在中心轮右侧直接套上垫片,然后用挡板通过螺钉将挡板跟行星架连接,从而将垫片固定住。整个过程就是先安装左侧垫片,然后安装太阳轮,再安装右侧垫片,最后将挡板与行星架连接固定。中心轴与滚动轴承连接,滚动轴承固定在行星架中心。
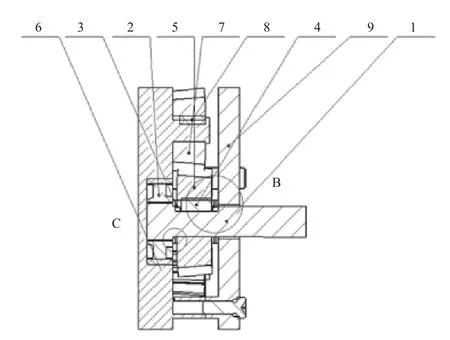
图1 锥形齿轮均载机构剖面图
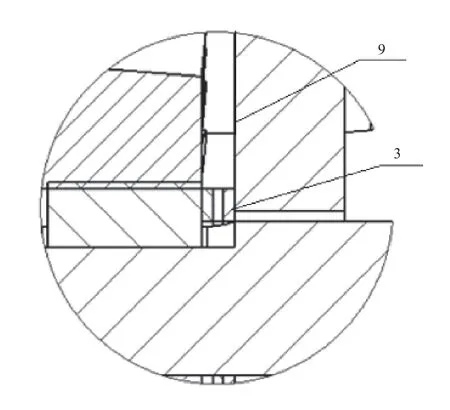
图2 锥形齿轮均载机构B部分细节图
中心轴上的太阳轮两侧有一定数量的垫片,后侧垫片由中心上的轴肩点位,前侧的垫片由挡板定位,并通过螺栓将行星架跟挡板固定。
因此,锥形齿轮均载浮动机构在工作的过程中,改变太阳轮两侧垫片的数量来改变太阳轮中心的位置,从而改变太阳轮与行星轮之间的啮合点,进而改变太阳轮与行星轮之间的间隙,可以实现齿侧间隙大小的有级调节。采用上述方案仅仅只需要改变太阳轮前后的垫片数量即可实现齿轮间隙的有级调节,从而实现太阳轮浮动量的连续调节。具体过程如下:
通过改变太阳轮左右两侧的垫片,使得太阳轮与行星轮之间的间隙改变:
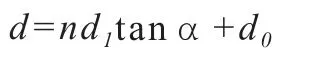
式中:d——太阳轮与行星轮之间的间隙;
d1——垫片的厚度;
d0——太阳轮左侧垫片为0时太阳轮与行星轮之间的间隙;
n——太阳轮左侧垫片数

图3 锥形齿轮均载机构C部分细节图
2 结论
该锥形齿轮均载机构结构简单,体积小,重量轻,锥形齿轮均在浮动机构在工作的过程中,改变太阳轮两侧垫片数目来改变太阳轮中心的水平位置,进而改变太阳轮与行星轮之间的间隙,可以实现齿轮间隙的有级调节,从而实现太阳轮浮动量的连续调节。
[1] 王宇航. 行星齿轮传动的均载机构及选择. 重型机械,2010(S2).
[2] 李斌. 行星齿轮传动系统均载分析方法的研究.
TH132.4
1009-797X (2015) 16-0085-02
A
10.13520/j.cnki.rpte.2015.16.027
柯永胜(1993-),武汉大学动力与机械学院、机械设计制造及其自动化。
2015-07-03
猜你喜欢
军民两用技术与产品(2022年8期)2022-10-10
昆明医科大学学报(2021年1期)2021-02-07
石油化工设备(2021年1期)2021-01-20
中国外汇(2019年19期)2019-11-26
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年9期)2017-11-27
中华骨与关节外科杂志(2016年3期)2016-05-17
中华老年口腔医学杂志(2016年5期)2016-03-01
中国继续医学教育(2015年5期)2016-01-07
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29