
新型高精度磁机电绝对式编码器设计
2015-11-18 10:53马向华段骏华
应用技术学报 2015年4期
马向华, 段骏华
(1.上海应用技术学院电气与电子工程学院,上海201418;2.上海海事大学物流工程学院,上海201306)
新型高精度磁机电绝对式编码器设计
马向华1, 段骏华2
(1.上海应用技术学院电气与电子工程学院,上海201418;2.上海海事大学物流工程学院,上海201306)
结合磁、机、电等技术设计实现了一种新型的低成本高精度的绝对值编码器.基于磁电原理设计了高精度的单圈测量模块,并通过模块AEAS-84AD获取多圈模块,高速微处理器芯片将单圈和多圈数值通过V位级联算法进行组合处理,然后利用微处理器的外部中断和定时器,有效可靠地实现了位置编码信号的串行输出.实际应用证明所设计的磁机电编码器不仅精度高、可靠稳定,而且成本大大降低.
编码器;光栅式绝对式编码器;磁机电绝对值编码器;V位级联算法
作为位置检测传感器类的一种,编码器主要用来侦测机械运动的速度、位置、角度和距离等.除了应用在产业机械外,许多马达控制如伺服马达、BLDC伺服马达均需配备编码器以供马达控制器作为换相、速度及位置的检测,因此,其应用范围相当广泛.根据检测原理,编码器可分为光学式、磁式、感应式和电容式.根据其刻度方法及信号输出形式可分为增量式、绝对式和混合式编码器[1].
旋转增量值编码器转动时输出脉冲,通过计数设备计算其位置.当编码器不动或停电时,依靠计数设备的内部记忆记住位置,停电后,编码器不能有任何的移动;来电工作时,编码器输出脉冲过程中不能有干扰而丢失脉冲,否则,计数设备计算并记忆的零点就会偏移,且此偏移的量只有在错误的结果出现后才能知道.解决的方法是增加参考点.编码器每经过参考点,将参考位置修正进计数设备的记忆位置,在参考点以前不能保证位置的准确性.在工业控制中有在每次操作时先找参考点、开机找零等方法.由于工业控制项目条件的限制,产生了绝对式旋转编码器,其因每个角度位置对应唯一的数字编码而得名.若系统的运动发生在电力中断期间,新的位置在电源恢复以后即能确定.此外,绝对式旋转编码器还具有可靠性高、抗干扰能力强等特点,在应用中越来越受到人们的重视.
绝对式旋转编码器分为单圈和多圈绝对式旋转编码器.单圈绝对式旋转编码器只能测量一圈(360°)范围内的值,在实际应用中如果测量的量程范围较大,仅单圈绝对式旋转编码器无法满足需要,应使用多圈绝对式旋转编码器.多圈绝对式旋转编码器由单圈模块、多圈模块以及将两个模块数值组合并转换输出的高速芯片构成.单圈模块即为单圈绝对式旋转编码器;多圈模块主要通过多级齿轮的机械耦合来测量圈数;高速芯片分别读取两个模块的位置信号并处理后输出.多圈绝对式编码器的精度取决于单圈模块的分辨率,测量量程取决于多级齿轮的级数.以Agilent的一款多圈绝对值编码器[2]为例,它由光栅单圈模块AEAS-7000[3]和已集成高速芯片的多圈模块AEAT-86AD构成.光栅式多圈绝对值编码器存在着很多缺点:①价格昂贵,特别是光栅单圈模块;②输出电平单一,大多数是以422电平信号输出;③由于采用了光学原理,容易受光线信号的干扰,导致输出信号的不准确;④机械安装要求极高,装配时必须保证单圈模块零点和多圈模块零点误差范围在1.5°之内,否则输出信号不准确.因此,本文设计了一种新型的磁机电绝对式旋转编码器,它克服了光栅式编码器成本高、输出电平单一、光线易干扰、机械“对零”难等缺点,目前已成功应用于工业控制仪表设备以及工业门的快速控制.
1 磁机电绝对式编码器的组成及工作原理
绝对式旋转编码器通过用光信号扫描分度盘(分度盘与传动轴相联)上的格雷码刻度盘以确定被测物的绝对位置值,然后将检测到的格雷码数据转换为电信号,以脉冲的形式输出测量的位移量.磁机电绝对式编码器由无接触式旋转编码器芯片AS5045、不含内置控制器的多圈模块AEAS-84AD和低功耗高性能cortex内核的高速芯片stm32f103 VB[4]构成,能够串行输出分辨率为12位、量程范围为4 096圈的绝对位置.
与光栅式绝对式编码器的实现原理类似,磁电绝对式旋转编码器先分别读取单圈位置和多圈位置,然后通过高速微处理器芯片进行组合处理,最后输出差分电平信号,实现框图如图1所示.

图1 磁机电绝对式旋转编码器的实现框图Fig.1 The realization of the magnetic-electromechanical absolute encoder block diagram
2 磁机电绝对式编码器设计
磁机电绝对式旋转编码器为一小型的嵌入式系统,测量原理的设计分为硬件和软件两部分.
2.1 硬件设计
由图1可知,磁电绝对式旋转编码器的硬件设计主要分为:①单圈编码器芯片AS5045与芯片stm32f103 VB之间的接口设计;②多圈模块AEAS-84 AD接口电路设计;③位置信号的串行输出接口电路设计.
2.1.1 单圈编码器芯片接口设计
单转模块AS5045[5]是一款无接触式磁旋转编码器,用于精确测量整个360°内的角度.此产品是一个片上系统,在单个封装内整合了霍尔元件、模拟前段和数字信号处理芯片.测量角度时,只需简单地配备1个在芯片中心上方旋转的双极磁铁即可.磁铁可以安装在IC的上方或下方,如图2所示.
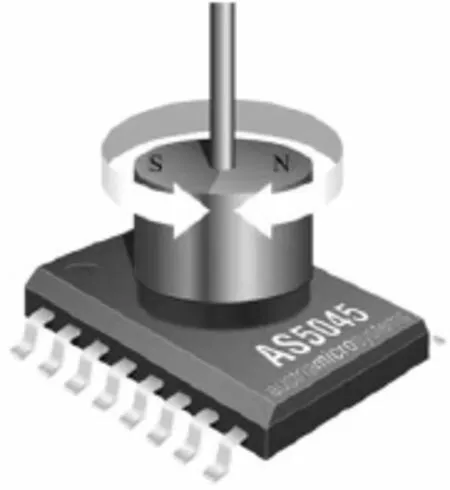
图2 AS5045和磁铁的典型配置方式Fig.2 The typical configuration mode of AS5045 and magnet
这种绝对角度测量方式可即时指示磁铁的角位置,其分辨率为0.087 9°,即每圈4 096个位置,数字化数据能够以串行比特流或PWM信号的形式给出.由于采用了无接触式检测方式,故在严酷的工作环境下工作时,仍然可以保证测量精度的需求.
在设计单转模块芯片AS5045与芯片stm32f103VB的接口电路时,须注意两方面的问题,即磁铁与芯片AS5045的间距以及串行信号的输出.磁铁与芯片AS5045的间距必须控制在合适的范围内,否则芯片AS5045无法正常工作.图3为AS5045与stm32f103VB的硬件连接图.图中,MagINCn脚表示磁场增强,低电平有效,表明磁铁与器件表面的间距减小;MagDECn脚表示磁场减弱,低电平有效,表明磁铁与器件表面的间距增大,各接一个发光二极管,用来指示磁铁位置是否在合适的范围内.其次,单圈位置信号的输出部分是一个标准的SPI协议,图中DO脚表示同步串行接口的数据输出,CLK脚表示同步串行接口的时钟输入,而CSn脚是片选信号,低电平有效.
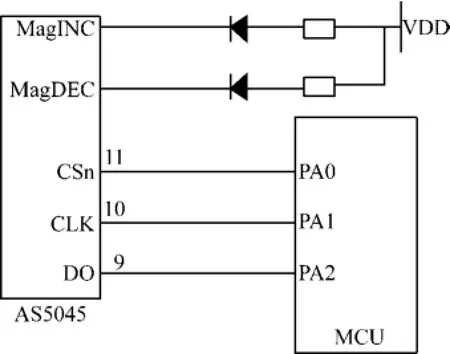
图3 AS5045与stm32f103VE的硬件连接图Fig.3 The hardware connection diagram of AS5045 with stm32f103VE
2.1.2 多圈模块AEAS-84AD接口电路设计
AEAS-84AD多转模块[6]集光、机、电一体,如图4所示,由IR-LED电路、光敏晶体管电路和安装在PCB板中的齿轮组成.模块内有内置控制器,用来检测轴旋转的圈数,然后将多元化输出提供给控制器.当采用编码齿轮技术后,组合模块的输出会通过控制器产生位置信息.掉电不需电池,上电位置即刻检测,因此应用简单、易实现.读取多圈位置实际上是一次分别读取各级齿轮对应数值的过程,选定一个特定齿轮号,然后读取该齿轮对应的码字,硬件连接如图5所示.
2.1.3 位置信号的串行输出接口电路设计
高速控制芯片在分别读取单圈模块和多圈模块的数值后,根据两者之间的逻辑关系进行组合处理,处理结果须通过一种并行或串行方式的信号输出.虽然并行方式输出信号速度快,但是接口管脚数多,且易受干扰,因此本设计选择串行的方式.为了使信号具有一定的抗干扰能力和带载能力,可以在串行输出信号端增加一些通讯协议芯片将其转化为差分串行信号,串行输出接口电路如图6所示.

图4 AEAS-84AD多转模块实物图Fig.4 The entity of multi-turn encoder module AEAS-84AD

图5 AEAS-84AD与stm32f103Vb的硬件连接图Fig.5 The hardware connection diagram of AEAS-84AD with stm32f103Vb

图6 信号的串行输出接口Fig.6 The serial interface of output signal
2.2 软件设计
在磁机电式绝对值编码器硬件电路设计的基础上实现相应的系统软件.由图1可知,该系统的软件由4部分组成:①单圈位置数值的获取;②多圈位置数值的获取;③单圈数值与多圈数值的逻辑组合处理;④位置信号的输出实现.
2.2.1 单圈位置数值的获取
单转模块AS5045将测量的单圈位置信号转化为12位绝对值编码,然后进行串行输出,其输出时序如图7所示.

图7 同步串行接口时序图Fig.7 Synchronous serial interface timing diagram
当CSn为逻辑低电平时,数据输出(DO)将从高阻态变为逻辑高电平,并启动读取操作:
(1)经过最短时间500 ns后,数据在CLK的第1个下降沿锁存至输出移位寄存器;
(2)每个后续的CLK上升沿将溢出1位数据;
(3)串行字包含18位,前12位是角度信息D[11:0],后6位包含系统信息,涉及数据的有效性,诸如OCF、COF、LIN、奇偶性和磁场状态等;
(4)通过CSn处的逻辑“高”脉冲启动下一次测量,CSn的最小持续时间为500 ns.
从逻辑时序图可知,图7为典型的SPI通信协议.本设计在单圈位置读数时,利用高速控制芯片stm32f103VB的3个GPIO(PA[0..2])模拟SPI通信协议.当对单圈模块开始读数时,控制芯片的PA0、PA1置为输出,分别模拟片选信号和时钟信号;PA2置为输入,用于接收数据.由图7可知,PA0拉低,PA1循环地置低、拉高,并且在PA1的上升沿读取PA2的管脚值,具体如流程图8所示.其中Flag_bit是串行读出数据位数计数器,当小于12时,在时钟信号的上升沿将串行读出的每一位数记录在data的最低位,然后左移一位,当12位全部读取后,整体右移一位,即得当前单圈位置值.
2.2.2 多圈位置数值的获取
利用多圈模块AEAS-84 AD读数时,需事先设定MTMUX[2:0]可以选定内部的多级齿轮,并通过MTDAT[2:0]读取齿轮的值.编码齿轮1到7产生的3位编码通过MTMUX[2:0]分别输出到MTDAT[2:0]上.MTMUX[2:0]上的二进制数值对应着编码齿轮号码(1=编码齿轮1,2=编码齿轮2等).
由图5可知,高速控制芯片stm32f103VB的3个GPIO(PB[0..2])输入多圈的齿轮信号,再利用控制芯片的另外3个GPIO(PD[0..2])接收齿轮的编码信号,其具体流程见图9.
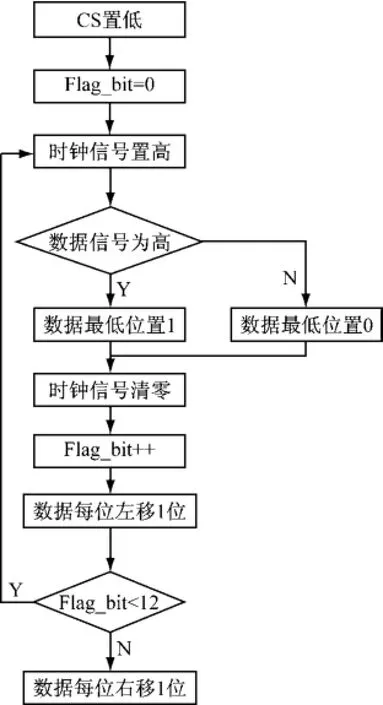
图8 单圈软件流程图Fig.8 The software flow chart of lap measuring module
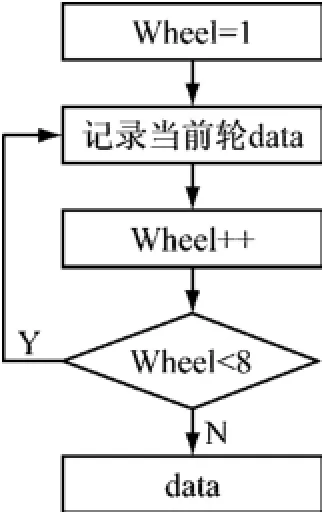
图9 多圈位置数值的读取流程示意图Fig.9 The flow chart of accessing multi-turn type measuring module location value
2.2.3 单圈数值与多圈数值的逻辑组合处理
在分别获取单圈和多圈位置后,需要将两个位置进行组合处理,这是磁机电绝对式编码器设计非常重要的内容.本设计根据图10所示的V位级联算法,将单圈模块数值的最高位码字和多圈模块6个编码齿轮对应的18个编码进行统一的逻辑处理(每一个齿轮生成3位编码),处理后产生12位的格雷码[7-8],然后将获得的12位格雷码转化为自然二进制码,该码字对应的为真正多圈位置的数值,将这12位自然二进制码和单圈位置编码相结合对应于真正的物理位置.

图10 V位级联算法原理图Fig.10 The schematic diagram of V-bit connection algorithm
2.2.4 位置信号的输出实现
由于磁电绝对式编码器通常是控制系统中的一个关键传感器,控制系统经常会随机地发送时钟信号以读取编码器的测量值,磁电绝对式编码器在收到时钟信号后将位置编码信号从高位到低位或从低位到高位串行地输出,控制系统收到编码信号后便可监测到位置、速度等信号的变化.
在位置信号输出时,必须注意两方面的问题:①时钟信号的周期必须有范围限制,如在[Tmin,Tmax]之内,超过该范围的时钟信号都必须放弃数值信号的输出;②位置编码的更新和输出必须保持同步.如位置编码在更新过程中,必须禁止位置编码信号的输出;同样地,在位置编码信号输出的过程中,也必须将该信号锁存,不允许更新,由此即不会造成位置编码信号更新和输出的冲突.
磁机电绝对式编码器的控制芯片stm32f103 VB通过中断技术接收时钟信号,即把GPIO的外部中断设置成单边沿触发的方式,在一个时钟信号周期中,stm32f103VB将响应一次中断服务程序,在服务程序中再将位置编码信号移出,具体流程如图11所示.由于stm32f103VB采用了完全基于硬件的tail-chaining中断技术,具有非常快的中断响应速度.由于时钟周期有范围限制,故在中断服务程序中须打开定时器,若时钟周期超过该范围,触发定时器溢出中断服务程序,并通过该程序将位置编码输出状态复位,以准备下一次的编码器读取.
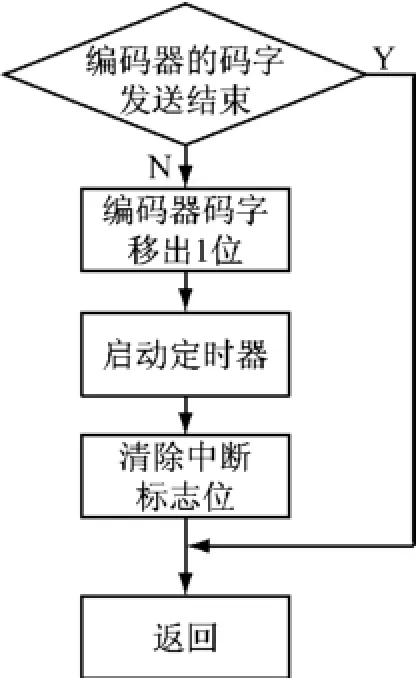
图11 外部中断服务程序Fig.11 The external interrupt service program
3 结 语
本文设计的磁机电式绝对值编码器精度高、可靠稳定,最重要的是成本低,只有光栅式绝对值编码器成本的1/3左右,在目前被外国商家占领的高端编码器市场中占有一席之地.该磁机电式绝对值编码器作为许多控制系统的关键部分已经成功应用于智能电动执行器、工业门控制等场合,大幅降低了整套控制系统的制造成本,提高了控制系统的可靠性,取得了很好的经济效益.
[1] 王鹏.编码器的原理特性及应用[J].重工与起重技术,2011(3):20-22.
[2] Avago.Avago Technologies.Integration of AEAS-7000 with AEAT-84 AD:Mechanical design considerations[EB/OL].US:Avago Technologies Pte.(2006-07-14)[2014-10-20].www.avagotech.com.
[3] Avago.Avago Technologies.AEAS-7000 ultra-precision 16 bit gray code absolute encoder module[EB/OL].US:Avago Technologies Pte.(2012-06-20)[2014-10-20].www.avagotech.com.
[4] STMicroelectronics.STM32F103x6 STM32F103x8 STM32F103xB performance line,ARM-based 32-bit MCU with Flash,USB,CAN,7 timers,2 ADC,9 communication interfaces[EB/OL].US:STMicroelectronics.(2012-06-10)[2014-10-20].http://www.stmicroelectro-nics.com.cn/.
[5] Austriamicrosystems.AS5045 12 bit programmable magnetic rotary encoder[EB/OL].US:Austriamicrosystems.(2006-07-03)[2014-10-20].www.austriamicrosystems.com.
[6] Avago Technologies.AEAT-84AD 14/12 bit multiturn encoder module[EB/OL].US:Avago Technologies Pte.(2012-06-11)[2014-10-20].www.avagotech. com.
[7] 方杰.基于HIPERFACE协议的绝对式高分辨率编码器接口设计和在交流伺服中的应用[J].机械制造,2014,52(7):44-46.
[8] 孙大海,艾华.基于FPGA双路EnDat2.2编码器的接口设计[J].液晶与显示,2014,29(5):745-750.
(编辑 俞红卫)
Design of a New Magnetic-Electromechanical Absolute Encoder with High-Accuracy
MA Xianghua1, DUAN Junhua2
(1.School of Electrical and Electronic Engineering,Shanghai Institute of Technology,Shanghai 201418,China;2.Logistics Engineering College,Shanghai Maritime University,Shanghai 201306,China)
A new magnetic-electromechanical absolute encoder was designed with high accuracy and low cost integrating magnetic,mechanical and electric technologies.Lap measuring module was designed based on magneto-electric theory,lap and multi-turn type measuring modules were processed with combination by using V-bit cascade algorithm,and then the effective and reliable realization of serial output of location coding signals was attained by taking advantage of exterior interrupt and timer of microprocessor.The practical application showed that the designed magnetic-electromechanical absolute encoder was effective with high-accuracy,stability and reliability.
encoder;grating absolute value encoder;magnetic-electromechanical absolute encoder;V-bit cascade algorithm
TP 212
A
1671-7333(2015)04-0387-06
10.3969/j.issn.1671-7333.2015.04.016
2014-11-03
马向华(1975-),女,副教授,博士,主要研究方向为网络控制系统、电气节能控制以及混合动力汽车能量管理等. E-mail:xhuam@sit.edu.cn
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
内燃机工程(2021年6期)2021-12-10
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
