多波束ALL格式解析与后期处理
2015-11-16 08:18:36简菁
中国科技信息 2015年2期
简 菁
多波束ALL格式解析与后期处理
简 菁

简 菁
中海油田服务股份有限公司物探事业部
Kongsberg Simrad公司生产的EM系列多波束测深仪将所采集的原始数据以ALL格式的二进制方式存储,这种存储方式虽然较为节省空间,却不方便数据处理和参数分析。有时在处理过程中发现问题,也无法通过读取和修改源数据进行修正。为便于数据处理及误差分析,以VB6.0作为开发平台,编写ALL格式分析系统,通过读取ALL文件中的数据,直观显示水深结果,并且提取需要的参数进行数据的分析和校正。
1 ALL文件格式
ALL文件采用数据包的二进制储存方式,物探船上的GPS定位数据、MRU姿态传感器数据、多波束的发射和接收数据都会按照时间顺序,作为一个个的数据包储存在ALL文件中,通过各个数据包的数据类型(Type of Datagram)作为区分。不同的设备使用的储存格式不尽相同,以水深数据包为例,EM3002采用Depth datagram格式,Type of Datagram=D,44h 68d(十六进制为44,十进制为68),而EM302则采用XYZ 88格式,Type of Datagram=X,58h 88d。
在大多数据包中开始的几十个字节的数据是相同的:4字节用于记录数据包的大小(Numbers of bytes in datagram),1字节表示数据包的起始标记(Start identifier,02h),1字节数据类型(Type of datagram),2字节设备型号(EM model number),4字节记录日期(Date),4字节记录时间(Time),2字节记录测线号(Ping counter),2字节记录设备型号(Serial number),而在数据包的最后为1个字节的结束标记(End identifier,03h),以及2个字节的检测。
详细的参数资料可以参阅《Kongsberg EM Series Multi-beam echo sounder EM datagram formats》,以下列出需要注意的几类。
安装参数 Installation parameters
记录开始或结束时会在ALL文件中增加此数据包,定义了在安装多波束的时候设置的参数,包括定位系统(Position System)、换能器(Transducer)及姿态传感器(Motion Sensor)的空间位置等。
测深Depth
记录了初步计算后的水深,包括艏向(Heading of vessel)、可用波束N(Number of valid beams),并且记录了每一个波束的纵向距离(Across-track distance)、横向距离(Along-track distance)以及测深(Depth),在空间上可以表示出所测水深。此外还记录了每个波束的方位角和俯角,可在不重新读取源数据的情况下根据横摇、纵摇等参数进行校正(如CARIS一般仅使用测深数据包,在做校正的时候也不会去再根据源文件进行重新计算)。
较新的数据格式为XYZ 88,除了部分数据使用浮点型(float)来替换原来的有符号整型(signed)外格式基本类似。此外,2005年底开始使用的三种数据格式:XYZ 88、Raw range and angle 78、Seabed image data 89可支持单Ping大于254的可用波束数。
船姿态 Attitude
记录了一段时间内的姿态变化,首先记录起始时间,此后每个时刻的姿态数据只记录起始后的时间(Time since record start),包括横摇(Roll)、纵倾(Pitch)、涌浪(Heave)、艏向(Heading)等姿态参数。
原始射程与波束角 Raw range and beam angle
记录原始数据,包括取样频率(Sampling frequency)、倾角(Tile angle ref TX array)、接收阵列波束角(Beam pointing angle ref RX array)、射程(Range in 0.25 samples)等。在这个数据包中记录的时间是发射波束的时间,而不是接收的时间。
2 计算方法
在测量水深时所需要的最终数据只要横坐标、纵坐标、水深即可。在ALL文件中主要储存三部分内容:测深、原始数据以及反射强度。其中测深数据基本可直接成图,反射强度数据在本文中暂不研究。
测深计算
根据定位坐标(Position)、艏向(Heading)、X(Along-track distance)、Y(Across-track distance)、深度(Depth),就可以计算出来,大多数情况下只用测深数据即可满足需要,但是在需要调整数据时就必须用原始数据计算。
原始数据计算
根据参数计算波束脚印。在双声纳模式下,会根据S1R和S2R参数对声纳头分别有一个转角偏移,而在单声纳模式中一般为0,此参数影响俯角。
①按接收波束的时间(发射时间+双程旅时,中央波束和边缘波束的接收时间是不同的),匹配船姿态数据以及定位坐标,并根据姿态传感器补偿参数修正姿态参数。
②根据安装参数,计算每个接收波束的状态。
波束指向角= H + SH;
波束俯角= T + SR;

其中,H=艏向Heading V=声速
T=倾角Tile angle
SH=换能器艏向Sensor heading
SR=换能器转角Sensor roll
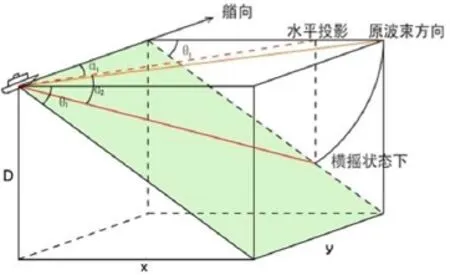
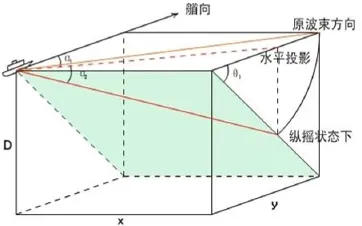
图1 横摇和纵摇对波束的影响
R=射程Range
F=取样频率Sampling frequency根据以上三个参数计算波束脚印相对于船的横坐标X、纵坐标Y以及测深D。
③根据姿态校正波束脚印。横摇校正:

纵倾校正:

其中,横摇θ1、纵摇θ2,原方位角α。校正后方位角α1,俯角改变量α2。
④根据校正后数据成图、提取参数或者导出水深值。
3 实例应用
在处理某东海勘探项目中,有一部分数据由X08船的EM3002多波束采集,在室内分析时发现存在规律性变化的波纹,通过南北向和东西向的测线对比,排除沙波的可能性,确定为仪器误差(图2)。通过整个区域的多波束资料认定本区域内水深变化均匀。

图2 通过CARIS处理时的截图
解决方案
①通过所编写软件对中央波束和边缘波束分别提取参数,包括左右两个探头在中央和边缘的波束,共计4组水深。
②通过对比分析发现:水深随姿态参数规律性变化,并且水深的左右晃动也与姿态有关。可推测姿态传感器MRU艏向与船艏向有一定夹角。
③MRU艏向校正
设MRU与船艏向夹角为α,当同时存在横摇R和纵摇P时,它们与测量的横摇R′和纵摇P′关系为则补偿后水深应为:

使用R、P来计算新的水深,调整α使得水深与横摇纵摇不线性相关即可。
④在源文件中修改需要补偿的参数,输出图像和数据(图3)。

图3 原水深图(左),校正后水深图(右)
4 总结
1.在处理多波束资料的时候不应完全依赖现有的商业软件,应对多波束文件格式、参数和理论有一定的了解,出现问题的时候才能及时的发现和解决。
2.多波束测深仪为精密仪器,在使用时应极其注意参数的设置,一旦参数设置异常,无法通过后期处理完全消除,只能在一定范围内减小误差。
3.编写了具有基础功能的多波束处理软件,功能上并不完善,但是可获得所需要的、通过商业软件无法提出的参数。
4.提出解决多波束误差的后期处理方法。
10.3969/j.issn.1001-8972.2015.02.003
猜你喜欢
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
销售与市场(营销版)(2021年10期)2021-11-21 20:15:03
销售与市场(营销版)(2019年6期)2019-06-21 01:16:38
通信技术(2019年3期)2019-05-31 03:19:08
电子测试(2018年6期)2018-05-09 07:31:54
网络安全技术与应用(2017年9期)2017-09-20 09:54:28
声学与电子工程(2017年1期)2017-06-22 11:30:09
浙江国土资源(2015年4期)2015-05-09 08:43:59
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20