
光伏电池滞环变步长MP P T算法研究
2015-11-10 07:10王洪诚赵全全宗子轩
网络安全与数据管理 2015年14期
胡 浩 ,王洪诚 ,胡 雄 ,赵全全 ,宗子轩
(1.西南石油大学 电气工程系,四川 成都 610500;2.武汉泰极江森汽车座椅有限公司,湖北 武汉 430000)
0 引言
太阳能由于储量大、清洁、可再生且不受地域限制,应用越来越广泛,但太阳能受季节和时间的影响,导致光伏发电输出功率不能稳定地使用。为了有效地提高太阳能发电效率,提高供电质量,光伏系统往往采用最大功率点跟踪(MPPT)技术对光伏电池的输出功率进行实时跟踪,最大限度地利用太阳能。目前常用的最大功率点跟踪方法主要有恒定电压法、电导增量法、扰动观察法[1]等。
恒定电压法[2]实际上是对MPPT方法的近似,算法的适应性差,跟踪精度不高。电导增量法对系统的硬件要求较高,需要精确测量电流电压值。扰动观察法是根据相邻两个采样周期的功率变化来决定下一时刻的扰动方向。本文提出了将恒定电压法和扰动观察法结合起来的方法,在综合了各自的优势后,在MATLAB/Simulink仿真平台上搭建了系统的仿真模型,并对算法进行了验证。仿真结果表明,该MPPT算法能明显改善系统的性能。
1 光伏电池模型分析
光照下光伏电池的实际等效电路如图1所示,图中考虑了光伏电池本身电阻对其特性的影响。

图1 光伏电池等效电路图
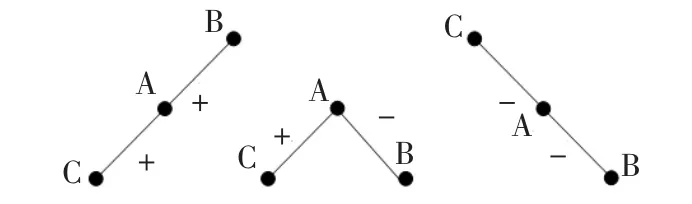
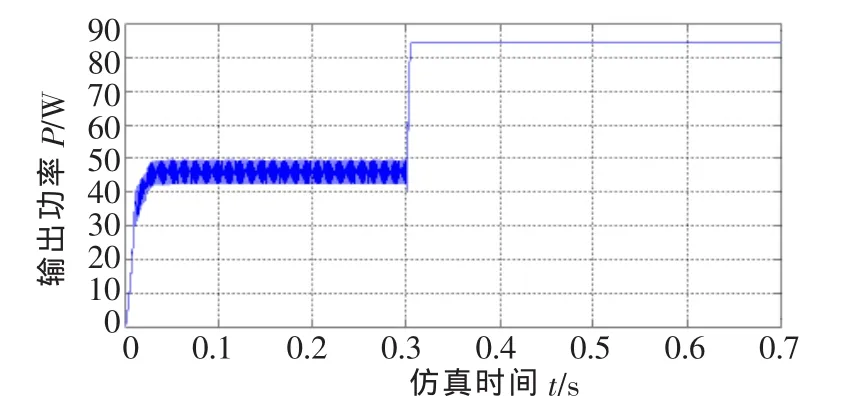
图1中,Rs为硅片的固有电阻,Rsh为 PN结的分路电阻,一般Rs< 由式 (1)、(2)、(3)可得:IR为光伏电池的输出电流;UR为光伏电池输出电压;q 为电荷常数,q=1.9×10-19;K为玻尔兹曼常数,K=1.38×10-23;T为光伏电池的温度;Rsh为光伏电池的并联等效电阻[3]。 由以上分析可知,温度一定时,光照主要影响光伏电池的输出电流,光照强度一定时,温度主要影响光伏电池的输出电压[1]。一定温度和一定光照强度下的P-U及I-U曲线,如图2所示。 图2 光伏电池的I-U和P-U特性图 从图2中可以看出,光伏电池最大功率点和电流不是一致的。由此可见,要想得到最大功率输出,必须对其输出功率进行控制。 滞环比较法的原理是当功率在设置的滞环内时,光伏电池的工作点电压保持不变,只有当功率的波动量超出设置的滞环时,才按照一定的规律改变工作点,针对光伏电池的P-U特性,其滞环控制环节如图3所示[4]。 图3 滞环控制的示意图 如果以A为工作点,在其两边相同距离取扰动点B和C,并且 A、B、C 三点的功率分别记为 PA、PB、PC。 由于扰动观察法比较的是相邻两个采样点之间功率的大小,即PA和PB或者PA和PC,分别进行独立的比较。现在取PA>PC记为+,否则为-;PB≥PA记为正(+),否则为负(-)。 由分析可知,有效的比较结构有3种,如图4所示。 图4 滞环比较法示意图 由图 4可知,如果 PA>PC∩PB≥PA,则电压扰动保持原来的方向;如果 PA 常用的步长确定方法有梯度法、牛顿迭代法等,但这些算法往往会造成迭代步长过大使系统发生较大振荡,影响了系统的稳定性。本文所采用的控制方法是通过对光伏电池输出电流电压采样,然后再判断前后采样周期功率的变化方向的方法[6],即在MPP点附近采用的变步长的方法,原理[6]如下: 式(4)[6]中,P(k)和 P(k-1)分别表示 k 和 k-1 时刻的采样功率。在采用恒压控制时,系统将参考电压值直接拉至MPP附近,采用逐步逼近的方式搜索最大功率,此时系统需要微小的扰动量,即要求ΔU很小。当比较采样点功率时,由于 P(k)和 P(k-1)比较接近,ΔU 较小,这就避免了因为过大的扰动步长而在MPP点附近发生振荡的情况[6],提高了系统的稳定性。 恒压法是基于在最大功率点处的电压值几乎为一个固定值原理。通常可以根据实际系统设定的一个固定电压值,使得系统始终保持运行在该设定电压下从而近似地获得最大输出功率。当外界环境较为稳定时,可以近似地认为光伏电池工作在最大功率点处。 扰动观察法是通过控制电路开关信号的占空比来改变电路的输出功率,进而根据输出功率的变化控制达到最大功率。扰动观察法是目前最为成熟的方法,它需要的硬件电路少,节省成本,但其跟踪的速度慢,特别在光照变化较快的情况下很容易出现误判,造成能量的损失。基于恒压法与变步长的滞环控制法相结合的MPPT控制法,先采用恒压法进行控制,使光伏系统工作在最大功率点附近,再通过较小步长的扰动使光伏组件的工作点向最大功率点移动,最后稳定在最大功率点,其控制流程[4]如图5所示。 本文的最大功率点跟踪 (MPPT)采用基于Boost电路作为光伏电池的负载,通过调节占空比控制电路的关断,从而实现MPPT。系统整体的仿真模型如图6所示,仿真结果波形如图7~图10所示。 图5 恒压变步长滞环控制结合的MPPT控制流程图 图6 系统整体仿真模型图 (其中定步长的步长值为0.001) 图7 定步长功率跟踪仿真波形图 图8 滞环变步长功率跟踪仿真波形图 图9 滞环变步长的Boost电路跟踪前后电流对比仿真波形图 图10 带滞环变步长的Boost电路跟踪前后功率对比仿真波形图 当温度一定时,当t=0.3 s时,光照强度从500 mW/cm2变化到800 mW/cm2。从仿真图可知,定步长产生了较大的振荡,造成了较大的能量损失。图8和图9分别给出了光照剧烈变化 (0时刻,500 mW/cm2;0.025 s时刻,1 000 mW/cm2;0.05 s 时 刻 ,800 mW/cm2;0.075 s 时 刻 ,1 000 mW/cm2)时,Boost电路中,由于电感的作用使得负载电流更加平滑,没有出现电流激增的情况,从而可以保证负载的稳定运行;由于采用了变步长的MPPT控制策略,光伏电池输出功率特性得到了很大的改善,尤其是在光照突变的时刻,输出功率平稳上升或者下降,并且很快达到了稳态,系统的快速性得到了提高。仿真实验从理论上证明了该算法的正确性。 本系统采用恒定电压法与滞环比较控制相结合的方法。经过多次的试探,当系统的定电压Um=0.8Uoc时,系统的响应速度很快,能很好地适应光照突变的情形。从仿真结果看,本系统MPPT对各种光强都有很高的转化效率,均能很好地跟踪光伏电池的输出功率,使其最大限度地利用太阳能。 本文在传统的MPPT控制方法基础上,提出了基于恒压和变步长滞环控制相结合的MPPT控制法,分别通过MATLAB/Simulink平台仿真分析,与相同条件下的定步长控制方法进行比较。仿真结果表明,该算法对光照迅速变化的情况具有很强的适应性,并且可以很好地跟踪光伏电池的输出功率,抑制了定步长在MPP点附近的振荡现象。本文的研究结果对于开发性能更为优异的MPPT算法具有一定的指导意义,但本文是基于恒定温度条件进行分析的,对于温度变化的情况,是下一步研究的方向。 [1]黄舒予,牟龙华,石林.自适应变步长 MPPT算法[J].电力系统及其自动化学报,2011,23(5):26-30. [2]熊远生,俞立等,徐建明.固定电压法结合扰动观察法在光伏发电最大功率点跟踪控制中的应用 [J].电力自动化设备,2009,29(6):85-88. [3]杨贵恒,强生泽,张颖超,等.太阳能光伏发电系统及其应用[M].北京:化学工业出版社,2011. [4]卢可可,张寅孩.基于恒压法和变步长滞环比较法结合的 MPPT算法研究 [J].工业控制计算机,2013,26(5):114-115. [5]刘琳,陶顺,郑建辉,等.基于最优梯度的滞环比较光伏最 大 功 率 点 跟 踪 算 法 [J].电 网 技 术 ,2012,36(8):56-60. [6]胡义华,陈昊,徐瑞东,等.一种两阶段变步长最大功率点控制策略[J].电工技术学报,2010,25(8):161-166.

2 滞环控制变步长MPPT算法
2.1 滞环比较法

2.2 扰动步长的确定

2.3 基于恒压和变步长滞环控制结合的MPPT控制法
3 仿真结果对比分析





4 结论
猜你喜欢
太阳能(2022年2期)2022-03-07成都信息工程大学学报(2021年5期)2021-12-30中国惯性技术学报(2020年2期)2020-07-24智富时代(2018年3期)2018-06-11智富时代(2018年3期)2018-06-11西安工程大学学报(2016年6期)2017-01-15电测与仪表(2016年8期)2016-04-15通信电源技术(2016年5期)2016-03-22北京航空航天大学学报(2016年12期)2016-02-27中国学术期刊文摘(2016年2期)2016-02-13
