
基于微观仿真的公交信号优先实施技术研究
——以南京市龙蟠中路为例
2015-11-08 05:07:50薛长松于小婉
交通运输工程与信息学报 2015年3期
薛长松于小婉
1. 悉地(苏州)勘察设计顾问有限公司,苏州215123
2. 苏州市运输管理处,苏州215007
基于微观仿真的公交信号优先实施技术研究
——以南京市龙蟠中路为例
薛长松1于小婉2
1. 悉地(苏州)勘察设计顾问有限公司,苏州215123
2. 苏州市运输管理处,苏州215007
公交信号优先控制策略一方面对于提升公交车辆运行效率发挥着重要作用,另一方面也可能给社会车辆的通行效率带来负面影响。为权衡实施公交信号优先控制策略利弊,本文以南京市龙蟠中路为例,通过对五种不同的信号控制策略下道路交通运行情况的比较分析,在技术层面研究了公交单向协调控制下公交信号优先控制方法的可行性和有效性。
城市公共交通;公交信号优先;信号协调控制;微观交通仿真
0 引 言
公交信号优先的概念早在20世纪60年代就出现在交通领域中,1962年在美国华盛顿特区首次进行了公交信号优先控制实验[1]。
公交信号优先(Transit Signal Priority,TSP)可以被定义为是一种通过修改正常的信号控制逻辑来调整公交车辆到达交叉口时刻信号灯状态,从而更好地为公交车辆顺利通过信号控制交叉口提供便利的一种智能交通系统运营管理技术。其目的在于通过消除或减少公交车辆在信号控制交叉口的等待时间,使得公交行程时间降低,最终实现公交服务的可靠性、公交运行时刻表契合度以及公交服务质量的提高与改善,同时,尽可能减少对其他道路使用者带来的负面影响,尤其是相交道路上的交通。
以往对于公交服务的相关研究表明[2],绝大部分公交延误不是发生在公交停靠站就是发生在信号控制节点。其中,公交停靠站造成的公交延误主要取决于公交乘客随机到达情况,减少这类延误的策略较为有限。相对而言,在信号控制节点处减少公交延误却有着更大的可能。
信号控制延误通常占公交行程时间的10%~20%,占公交总延误的50%左右[1]。而在信号控制交叉口,通过采用公交信号优先控制策略,可以实现公交车辆平均停车延误的减少,从而使总体的乘客延误减少。
本文将以设置了“外侧式”公交专用道的南京市龙蟠中路(北京东路—象房村路段)为例,通过对比分析5种不同的信号控制方案仿真分析结果,检验基于公交单向协调控制的公交信号优先控制方法的可行性和有效性。
1 研究对象
“外侧式”公交专用道在国内外各大城市中应用都较为普遍,如韩国首尔、中国香港、台北市罗斯福路、1999年昆明市北京路建成的公交专用道(目前已改造为“外侧式”)、南昌市青山路、北京市复兴门外大街与京通快速路以及南京市龙蟠中路等。
南京市龙蟠中路为南北向双向6车道城市主干道,其中北京东路至象房村路段长约4 km,沿线设置了5个信号控制交叉口和3个路段行人过街信号控制节点,布设7对公交站,具体如图1所示。

图1 研究对象示意Fig.1 The sketch map of research object
2 微观仿真建模
2.1 信号控制方案
为验证公交信号优先协调控制方法的有效性,特对下面5种方案进行了仿真分析,分别说明如下:
(1)现状无协调控制无公交信号优先控制模型
该方案使用现状早高峰(7:00—9:30)调查获取的信控方案(详见文献[9])作为仿真模型中的信控方案。通过对既无协调控制又无公交信号优先控制的现状路网运行情况的仿真分析,一方面可以进行模型参数的标定或校正,保证输出参数的真实性和有效性;另一方面也使得后续仿真分析的可比性得以保证。
(2)南—北公交单向协调控制模型
该方案根据现状高峰期间交通流量流向调查,对由南往北方向通行的公交进行了协调控制。为此,各交叉口的信号控制方案需根据公交单向协调控制的要求进行调整。VISSIM仿真模型中,构建如表1和表2所示的初始信号配时方案,并设置相位差。

表1 协调控制下各交叉口初始信号配时方案Tab.1 The initial signal control schemes of all the intersections based on coordinated control
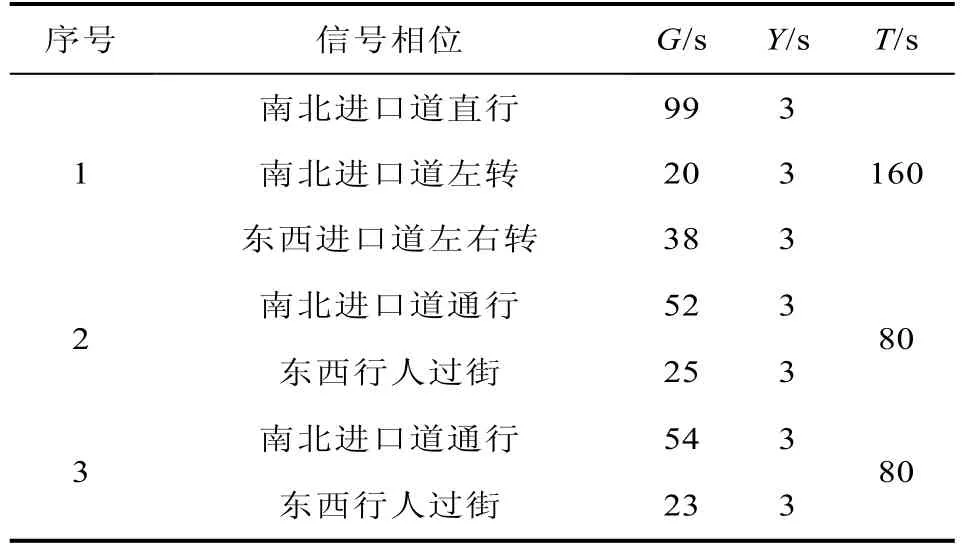
表2 协调控制下各路段信控节点初始信号配时方案Tab.2 The initial signal control schemes of all the road segment based on the coordinated control
(3)北—南公交单向协调控制模型
该方案类似于第二种方案,只是对相反运行方向的公交进行了协调控制。各交叉口信号控制方案与方案二基本一致,区别在于相位差的设置。
(4)南—北公交单向协调TSP模型
该方案是在第二种方案的基础上引入公交信号优先控制,为此相应的信控方案需要借助VisVAP模块编程后进行进一步调整。
(5)北—南公交单向协调TSP模型
该方案是在第三种方案的基础上引入公交信号优先控制,同样需要利用VisVAP模块对调整后的信控逻辑进行编辑。
2.2 最小绿灯时间
本文所述各相位“最小绿灯时间”是指该交叉口在未进行协调控制情况下,考虑行人过街需求后各相位所分配得到的显示绿灯时间,可由下式计算获得:

Cw为按Webster公式计算得到的信号控制节点j的最佳信号周期时长,s;
L为节点j每周期各相位i的损失时间Lij之和,s,即
Y为周期内各相位关键车道组的流率比之和;
Yij为节点j相位i对应的车道组关键车道流率比的最大值,且
Lij为节点j相位i的总损失时间,s;
Aij为节点j相位i的黄灯时间,s。
但考虑到公交协调控制的需要,因而,公交协调控制方向上的相位最小绿灯时间不能小于协调控制条件下关键交叉口的公交通行相位的最小绿灯时间,即其中p为协调控制交叉口的公交通行相位次序。
2.3 最大绿灯时间
本文所述公交信号优先通行相位“最大绿灯时间”是指某个交叉口在采用协调控制情况下,公交通行相位显示绿灯时间与同一周期内其他各相位能够用于公交信号优先的最大绿灯延长或提前时间之和,具体可由下式计算获得:

Gkj为交叉口j在协调控制情况下公交信号优先通行相位k的正常显示绿灯时间,s;
C为交叉口j在协调控制情况下的周期时长,s,

C0j为交叉口j在未进行协调控制情况下的周期时长,s,

Gij为交叉口j在协调控制情况下相位i的正常显示绿灯时间,s;
Iij为交叉口j各相位i的绿灯间隔时间,s。
信号控制交叉口某一相位的最大绿灯时间一般为30~60s[3-4],但就龙蟠中路沿线交叉口而言,考虑到可能最终算得的特别大的情况,因而本文将公交信号优先通行相位最大绿灯时间的上限界定为协调控制情况下公交通行相位绿灯时间的1.25倍[5]。

2.4 相位差
信控节点相位差是指相邻的两个信控节点的信号灯在某一通行方向上绿灯启亮时间之差,即下游信号灯某一相位绿灯启亮时间与上游信号灯对应相位绿灯启亮时间的差值。
基于公交优先的思想,特对某一通行方向上公交车辆进行单向协调控制。区别于社会车辆协调控制下相位差的确定不需考虑停靠的情况,在公交协调控制下相邻的两个信号控制节点的相位差可根据下式计算得到:

Sn为节点i到节点j之间的路段上区段n的距离,m;
vn为节点i到节点j之间的路段上区段n的公交平均行驶速度,m/s;

就公式(4)中第二部分的取值原则是“取大不取小”,可以结合历史调查数据进行确定,借鉴85%位车速的概念,建议将取为该站点高峰期间历史停靠服务时间的85%位值,其原因分析如下。
如图2所示,当公交车辆于绿波带宽尾部时刻通过信控节点1时,其停站服务时间在正常情况下能够保证其顺利在绿灯期间通过信控节点2,即图中实线A所示。然而,如果停站服务时间增加Δt,则该辆公交车将可能正好在红灯启亮的时刻到达停车线前,即图中虚线B所示。因此,在公交停靠服务时间并不固定的情况下,宜取各停靠站历史调查数据中较大值。

图2 公交车辆停站服务时间对公交协调控制的影响示意Fig.2 Effect of transit stop time on transit coordinated control
根据调查,本文研究的龙蟠中路沿线各公交停靠站高峰期间85%位停靠服务时间为17s。为此,基于调查分析结果,根据公式(4)计算得到研究路段各信号控制节点的相位差如表3所示。

表3 协调控制下各节点间相位差Tab.3 Offsets of all the functions based on coordinated control
2.5 仿真预热时间
在仿真模型中,交通流的输入问题通常是通过车辆生成模型来解决的。由于仿真开始前路网尚处于零流量状态,因而在采集分析数据之前应该保证路网中的流量输入水平达到接近实际情况下的流量。从仿真开始到仿真路网中车辆开始相互交流影响这段过渡时间被称为预热时间。为保证用于分析研究的数据真实可靠,仿真运行输出的数据应该在预热时间之后某一时刻进行获取。大多数仿真模型都是根据用户需要,由用户自己来定义仿真运行的预热时间,因而仿真运行的预热时间也不尽相同。但一般而言,预热时间可以根据公式(5)来确定,即将仿真路网中最长路线的车辆行程时间作为仿真运行预热时间[6]:

式中:Tw是指一次仿真运行的预热时间,s;
Lmax是指仿真路网中最长线路的距离,即车辆通行距离最远的两个车源点(不断产生新的车辆的节点)之间的路径距离,km;
v是指仿真路网中车辆的平均行程车速,km/h。
鉴于本文仿真路网最远的两个车源点之间的路径距离约为4km,按36km/h的车速测算,一次仿真运行的预热时间约为400s。
2.6 仿真次数
为了确保仿真结果具有统计学意义,需要进行多次仿真运行[7]。所需仿真运行次数计算方法如下式所示[8]:

式中:μ和δ分别是已经进行的仿真运行获取的评价指标的平均值和标准偏差;
ε是通过仿真运行获取的评价指标均值μ的最大允许误差;
tα2是指在显著性水平α条件下t分布的临界值;N是指需要进行的仿真运行次数。
2.7 交通相关数据
仿真输入的交通量、车辆构成、公交线路及发车频率、车速等交通相关数据,主要来源于早晚高峰实际调查,详见文献[9]。
3 公交信号优先控制方法
3.1 公交信号优先控制决策
信号相位首先应基于公交车辆主流通行方向(专用道条件下即为公交专用道通行方向)进行单向协调控制,并在保持各信号周期固定不变的基础上,针对各交叉口公交信号优先请求对各相位进行如下调整。
首先,确保各交叉口所有相位“最小绿灯时间”,同时限制公交信号优先通行相位“最大绿灯时间”。其目的在于保证实行公交信号优先控制的同时不至于给其他相位车辆通行带来较大的负面影响。
为便于分析,假设一个周期共有n个相位,公交优先通行相位为第1个相位。在进行公交信号优先控制时,仅对各相位的显示绿灯时间进行调整,而周期时长C保持固定不变。以每个周期第1个相位的通行绿灯启亮时刻为计时零点,记Tc=0,且Tc随着信号周期的运行而增长,即在每个信号周期开始时,Tc自动归零,每个周期结束时,Tc随时间自然增长到C,即Tc=C。Ta为自检测到公交车辆通过检测器位置到该车预期到达下游交叉口停车线的时间。
(1)检测到公交经过时,当前相位为公交通行相位(相位序号记为1)



(2)检测到公交经过时,当前相位(相位序号记为s)为非公交通行相位。
由于本周期公交通行相位绿灯时间已经结束,公交车辆只能等到下一周期公交相位绿灯或者等到本周期即将结束时红灯早断期间通过停车线。下面将分三种情况进行讨论。
① 当前相位已经显示的绿灯时间尚未达到最小显示绿灯时间的情况下,即1<s≤n且时,则可以将当前相位以及本周期剩余相位的显示绿灯时间都调整为最小显示绿灯时间,从而为检测到的公交车辆提供红灯早断这一优先策略。
② 当前相位并非本周期最后一个相位,且已经显示的绿灯时间已达到最小显示绿灯时间的情况下,即1<s<n且时,则可以保持当前相位正常显示的同时将本周期剩余相位的显示绿灯时间都调整为最小显示绿灯时间,亦为检测到的公交车辆提供红灯早断策略,从而实现公交车辆停车等待时间的缩短。
③ 当前相位为本周期最后一个相位,且已经显示的绿灯时间达到了本信号相位最小显示绿灯时间的情况下,即s=n且时,则应当保持本信号相位正常显示,不响应该公交车辆的优先通行请求。
3.2 协调控制下公交信号优先控制逻辑
就本文所研究的沿线公交优先而言,一方面体现在单向公交协调控制获取的公交绿波带宽;另一方面则体现在协调控制基础上,为双向直行公交车辆提供的公交信号优先控制策略。本文在某一方向公交协调控制的基础上,主要根据对向以及协调方向上公交车辆到达情况,合理地进行公交信号优先控制策略的选择,从而实现公交车辆的快速、便捷、安全通行。
这里主要考虑绿灯延长和绿灯早启这两种公交信号优先控制策略的选用问题。根据前文分析,下面分别针对四相位控制十字交叉口、三相位控制T型交叉口以及两相位控制路段提出相应的公交信号优先控制逻辑。
为便于研究,将公交协调相位作为第1相位,且假定每个信号周期固定不变。同时,在未检测到有公交车辆到达或排队的情况下,各交叉口所有信号相位绿灯显示时长都按照协调控制后定时式运转。而仅在检测到公交车辆到达或排队,并满足上文分析中提出的相应优先条件时才给予信号优先控制。
(1)四相位控制十字交叉口TSP控制逻辑
有无公交车辆到达或者排队是进行公交信号优先控制的前提,而检测到公交车辆到达的时刻所对应的信号灯状态则是合理选择公交信号优先控制策略的依据和关键。
为此,就四相位控制十字交叉口而言,其公交信号优先控制逻辑具体如图3所示。

图3 四相位控制十字交叉口公交信号优先控制逻辑Fig.3 TSP control logic of four-phase controled intersections
而对于在后续相位某一相位检测到公交车辆到达的情况,也主要通过压缩当前相位以及后续相位可压缩的时间,在下一周期相位1绿灯启亮之前“节流开源”,提供一个“绿灯前延”的控制策略,尽可能减少公交车辆停车等待时间。这种情形下,特别是对于在相位4期间检测到公交处车辆到达的情况下,所能提供的绿灯提前启亮时长可能很有限。同时,为便于分析,这里将同一周期中由其他相位压缩获得的时间,不论用于本周期相位1的绿灯后延还是用于下一周期相位1的绿灯前延,都统一计算在本周期时长内,这就保证了每个分析周期时长的一致相等。
(2)三相位控制T型交叉口TSP控制逻辑
就三相位控制T型交叉口而言,其公交信号优先控制逻辑,类似于四相位十字交叉口,如图4所示。
(3)两相位控制路段TSP控制逻辑
两相位信控路段公交信号优先控制逻辑相对最为简单,如图5所示。
4 结果分析与结论
通过对以往研究中所采用的公交信号优先评价指标的筛选,同时结合VISSIM软件的输出参数,选取最大排队长度、平均排队长度、车均停车次数、车均延误、车均停车延误以及人均延误等指标进行不同方案的比较分析。
通过对五种不同信号控制方案的仿真分析,得到以下结果:
(1)排队长度
① 最大排队长度
由表4可以看出,公交信号优先协调控制方案下的最大排队长度最小,而现状无公交信号优先无协调控制方案下的最大排队长度最长,是公交信号优先协调控制方案下的2倍多。

图5 两相位控制路段公交信号优先控制逻辑Fig.5 TSP control logic of two-phase control road segment
就现状而言,早高峰期间最大排队长度达到了500m以上,主要发生在龙蟠中路—中山东路交叉口,其原因在于南进口左转车流较大,而现状交叉口渠化中两条左转专用进口车道有一条车道长仅能容纳一辆小汽车,因此实际上相当于仅有一条左转专用车道,道路时空资源不能满足左转车辆需求,从而造成左转车道排队延伸至正常通行的两车道路段(考虑到公交专用道占用了最右侧一条车道),进一步阻碍了正常的直行社会车辆的通行,最终造成直行相位时空资源浪费的同时道路排队不断加剧。为此,建议将最内侧左转进口车道进行延长改造,同时将近交叉口处路段拓宽至3车道。
② 平均排队长度
由表4可以看出,五种方案中现状平均排队长度最大,约为50.6m,而公交信号优先协调控制方案和公交单向协调控制方案下的平均排队长队相对较小,大约仅有现状的一半。
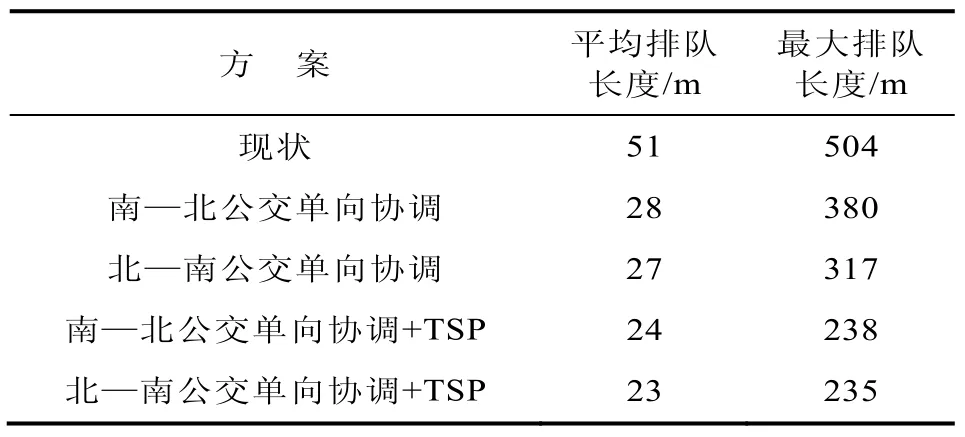
表4 五种信号控制方案对排队长度的影响Tab. 4 Impact of five signal control schemes on the queue length
公交信号优先协调控制方案下平均排队长度略小于公交单向协调控制的情况,其原因在于公交信号优先协调控制方案,在协调控制的基础上考虑对协调方向上公交车流提供了更多的绿灯时间,这也同时为协调方向上社会车流的疏解提供了便利。但协调方向上的优先并未造成相交道路上平均排队长度的较大增加,其原因在于公交信号优先时间受到最大绿灯时间等因素的制约,从而使得所有交叉口协调相位有12s以下(龙蟠中路—北京东路交叉口最大为12s、龙蟠中路—中山东路最多为5s、龙蟠中路—瑞金路最多为11s、龙蟠中路—白下路最多为4s)的绿灯延长/早启时间,同时不至于对其他相位的车辆通行造成太大的影响。
(2)停车次数
由表5可以发现,就车均停车次数而言,公交信号优先协调控制方案最小,现状最大,两者相差大约为0.20~0.24次/辆。其原因可能在于,单向协调控制使得协调方向上部分车辆的停车次数减少,而公交信号优先控制进一步减少了协调控制方向上部分车辆的停车次数。

表5 五种信号控制方案对车均停车次数的影响Tab.5 Impact of five signal controlled schemes on average stop time
(3)延误
由表6可以看出,就车均延误、车均停车延误和人均延误而言,从现状控制方案到公交单向协调控制方案到公交信号优先协调控制方案,都是由大到小依次减少。但就人均延误而言,公交信号优先协调控制方案相比于公交单向协调控制方案减少幅度不大,其原因在于协调控制基础上公交信号优先控制带来的额外效益受到绿灯延长/早启时长大小的影响。

表6 五种信号控制方案对延误的影响Tab.6 Effect of five signal control schemes on delays
因此,从排队长度、停车次数以及延误这三类指标的比较分析中可以发现,公交单向协调控制方案优于现状无协调控制无公交信号优先控制方案,而公交信号优先协调控制方案又优于公交单向协调控制方案。通过采用公交信号优先协调控制,仿真分析的龙蟠中路沿线,高峰期间最大排队长度和平均排队长度可以在现状情况下减少50%以上,车均停车次数可以比现状减少19%~22%,车均延误和车均停车延误可以降低到现状的75%左右,而人均延误也可以减少为现状的80%~83%。
而就所提出的方法对社会车辆所带来的影响而言,主要从行程时间和行程车速两个方面进行分析。

表7 公交单向协调下研究路段上车辆行程时间比较Tab.7 Comparison of vehicle travel speeds on the research section under the unidirectional coordination control of bus
由表7和表8可见,就行程时间而言,协调控制方向上,无论是社会车辆还是公交车辆,都小于现状情况。其中,对于公交车辆而言,其行程时间相比于现状减少了10%~15%,而其行程车速却提高了41%~54%。而非协调控制方向上,对于社会车辆而言,其行程时间最大值几乎与现状持平,而对于公交车辆,其行程时间最小值接近于现状平均值11.4min,但最大值却高出现状平均值近35%。相应的,非协调方向上,公交车辆的行程车速低于现状的平均水平15.2km/h,约为现状的95%。
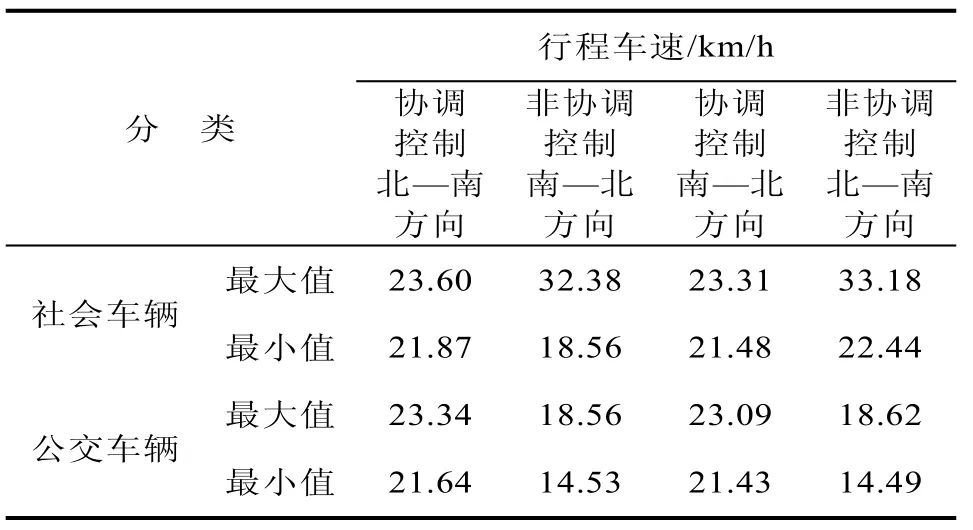
表8 公交单向协调下研究路段上车辆行程车速比较Tab.8 Comparison of vehicle travel speeds on the research section under the unidirectional coordination control of bus
综上分析可以发现,基于公交单向协调控制的公交信号优先控制方法,在确保非协调控制方向上车辆运行状况基本不受影响的前提下,能够实现协调控制方向上车辆运行状况的极大改善。而且,通过实施基于公交单向协调控制的公交信号优先控制方法,可以实现整个路网上车辆运行状况的整体改善。该方法对于改善当前我国各大城市公交专用道运行效果具有一定的参考价值,可结合具体道路实际情况合理选用具体的公交信号优先控制方案。
[1] Sunkari S. R., Beasley P. S., Urbanik T, et al. Model to evaluate the impacts of bus priority on signalized intersections[J]. Transportation Research Record, 1995 (1494): 117-123.
[2] Brilon W., Laubert W. Priority for public transit in Germany [J]. Journal of Advanced Transportation, 1994, 28(3): 313-340.
[3] Dion F, Heliinga B. A rule-based real-time traffic responsive signal control system with transit priority: application to an isolated intersection [J]. Transportation Research Part B: Methodological, 2002, 36(4): 325-343.
[4] Yin H, Wong S. C.,eI al.Urban traffic flow prediclion using a fuzzy-neural approach [J].Transportation Research Part C: Emerging Technologies, 2002, 10(2): 85-98.
[5] 袁振洲. 道路交通管理与控制[M]. 北京: 人民交通出版社, 2007.
[6] Smith H R, Hemily B, Ivanovic M. Transit signal priority (TSP): A planning and implementation handbook [J]. 2005: 85.
[7] Chu L., Liu H. X., Recker W. Using microscopic simulation to evaluate potential intelligent transportation system strategies under nonrecurrent congestion[J]. Transportation Research Record: Journal of the Transportation Research Board, 2004, 1886(1): 76-84.
[8] Chu L., Nesamani K. S., Benouar H. Priority based high occupancy vehicle lanes operation[C]// Transportation Research Board Annual Meeting 2007. 2007, pp.9-10.
[9] 薛长松.城市公交专用道公交信号优先协调控制方法研究[D]. 南京: 东南大学,2014.
(中文编辑:刘娉婷)
Microscopic Simulation of Transit Signal Priority Implementation along Longpan Zhonglu of Nanjing
XUE Chang-song1YU Xiao-wan2
1. CCDI(SuZhou) Exploration & Design Consultant CO. Ltd., Suzhou 215123, China
2. Suzhou Transport Management Department, Suzhou 215007, China
Transit signal priority is a control strategy, which plays an important role in promoting transit operating efficiency. However,this strategy has also shown potential to bring negative impact on the social vehicles. To weigh the pros and cons of the strategy, this paper took Longpan zhonglu of Nanjing city as an example, and the traffic performanceof five different signal control strategies was compared by using microscopic traffic simulation model in VISSIM. It is found that transit signal priority control method based on one-way coordinated control for transit vehicles is feasible and effective.
Urban public transportation, transit signal priority, signal coordinated control, microscopic traffic simulation
U491.5+1
A
1672-4747(2015)03-0102-11
10.3969/j.issn.1672-4747.2015.03.017
2014-10-22.
薛长松(1988-),男,汉族,江苏苏州人,悉地(苏州)勘察设计顾问有限公司助理工程师。
猜你喜欢
纺织科学研究(2021年6期)2021-12-02 20:32:56
数学小灵通(1-2年级)(2021年9期)2021-10-12 05:37:08
装备制造技术(2020年9期)2021-01-26 00:15:08
作文周刊·小学一年级版(2020年40期)2020-10-19 04:42:20
自动化学报(2017年4期)2017-06-15 20:28:55
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24 02:47:36
新闻前哨(2015年2期)2015-03-11 19:29:30
电网与清洁能源(2015年2期)2015-02-28 16:03:08
电测与仪表(2014年22期)2014-04-04 11:55:06
电力工程技术(2012年5期)2012-03-25 10:40:38
