浅谈GPS测定正常高
2015-11-04 12:16李志鹏付江涛
山东工业技术 2015年21期
李志鹏+付江涛
摘 要:GPS测量技术以其自动化、高效率、高精度、全天候等优势,得到了广泛应用。由于GPS测量的高程系统不同,需要将GPS测量的大地高转换为我国法定高程系统(正常高系统)。我们将分析测量数据,讨论GPS高程测量可以满足我国高程系统要求。
关键词:GPS;正常高;高程拟合;高程测量
DOI:10.16640/j.cnki.37-1222/t.2015.21.112
0 引言
高程测量方法一般有水准测量、三角高程测量、GPS高程测量。水准测量和三角高程测量是通过测定两点间的高程差来求出正常高。虽然这种方法直接快速,但实施起来费时费力, 工作效率较低。随着GPS测量技术的发展, 以其自动化、高效率、高精度、全天候等优势引起测绘界的广泛关注。通过一定数量的已知GPS点,建立工作区域的高程模型,进而计算出其它未知点的高程,这将极大地减轻外业工作量,提高工作效率。
1 正常高
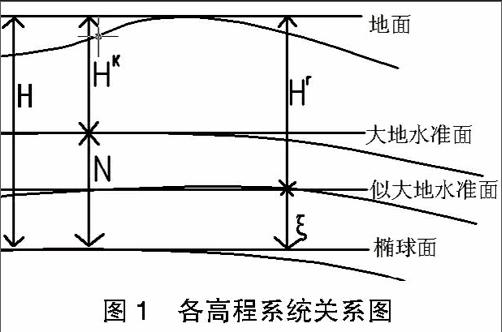
莫洛坚斯基于1945 年提出了正常高的概念, 即地面点沿铅垂线到似大地水准面的距离()。由于γm是待定点的正常重力值,所以正常高可以通过重力值求得。由各地面点沿正常重力线向下截取各点所构成的曲面, 称为似大地水准面, 它是正常高的基准面。目前我国法定高程系统采用的是正常高,而GPS高程是WGS-84坐标系中的大地高(大地高是从一地面点沿过此点的地球椭球面的法线到地球椭球面的距离),想要使GPS高程在工程实际中得到使用,必须实现GPS大地高向正常高的转换。
2 GPS测定正常高
通过GPS网中已知点的大地高进行GPS网平差,可以得到网中各点大地高H1。如果同时已知该点的正常高H2,水准测量得到其他GPS点与该点的正常高差h,则各点的高程异常(a=H1-H2-h)。当认为已知大地高无误差时,由GPS网得到的大地高具有相当高的精度,同时由水准测量得到的正常高差h,故可以求得高精度的似大地水准面。通过已知点上的异常值拟合出工作区域的似大地水准面,进而计算出未知点上的高程异常,利用公式(a=H1-H2-h)反向求出未知点的正常高。
3 实例分析
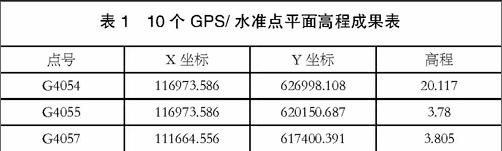
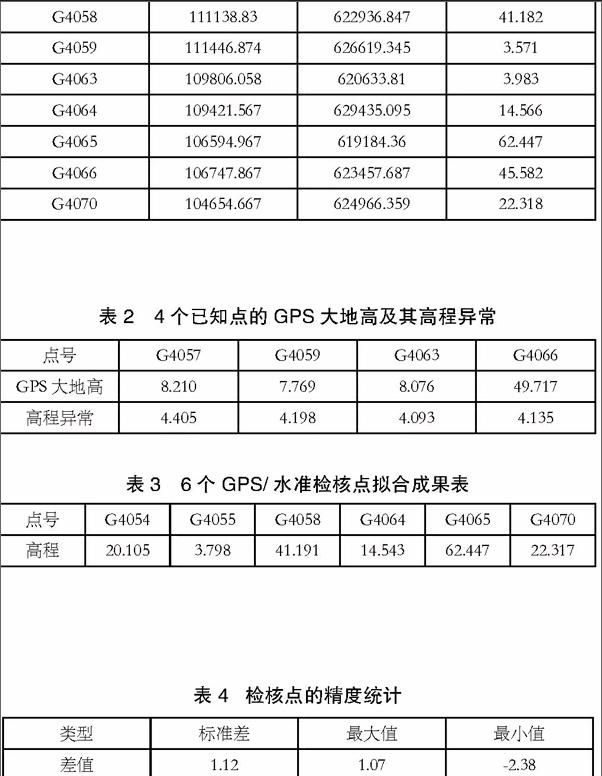
小港镇首级GPS控制网,采用北京清华山维测量技术开发公司开发的软件(NASEW3.0)进行控制网平差,由软件根据已知点的高程计算出各个待求点的高程。为分析曲面拟合模型的精度,特选取其中分布均匀的10个一级控制点,该10个控制点可构成一小区域控制网,并对其进行GPS测量和水准联测,水准路线总长约为40km,平均两点间距离约为6.5km,其中G4057, G4059,G4063,G4066为GPS控制点进行水准联测,其余6个为检核点。
采用文献中的高程数据转换拟合软件,得出表2。
通过程序计算出已知点和检核点上的标准差、最大值、最小值,列于表[4]。
4 结论
通过一定数量的已知点和GPS点高程联测,建立工作区域的高程异常模型,实现GPS大地高向正常高的转换,计算出未知点的正常高。利用北京清华山维测量技术开发公司开发的软件(NASEW3.0),根据已知点高程计算出各个未知点高程,并对全网进行高程分析,我们得出GPS高程测量的标准差、最大值、最小值满足要求。
参考文献:
[1]刘立龙,林文介.GPS测定正常高的方法研究[J].桂林工学院学报,2001(03).
[2]Shresha R.把GPS 大地高转化为正高时的曲面内插技术[J].武测译文,1994(02):1-11.
[3]陶本藻.GPS 水准似大地水准面拟合和正常高计算[J].测绘通报,1992(04):14-18.
[4]刘长建,吴洪举,张俊.GPS 水准拟合方法的比较与软件编制[J].信息工程大学报,2006(01).
[5]张大伦,耿继原,马力.基于VC的GPS 高程的应用研究[J].华北师范学院学报,2006(03).endprint