越障型四足步行机动平台的关键技术分析
2015-11-04 02:35谭永营杜斌周浩森
山东工业技术 2015年21期
关键词:机械结构
谭永营+杜斌+周浩森

摘 要:对越障型四足步行机动平台国内外主要研究机构的研究成果进行了分析,从仿生结构、驱动系统和行走步态三个方面对越障型四足步行机动平台的关键技术进行了总价。
关键词:四足步行机动平台;机械结构;驱动方式
DOI:10.16640/j.cnki.37-1222/t.2015.21.028
越障型四足步行机动平台是在对自然界四足动物越障原理研究的基础上研发出来的能够适应复杂地形的步行机器人。足式运动方式可利用离散的地面支撑点实现稳定的运动。步行机动平台比轮式越障平台适应复杂地形的能力更强,比履带式越障平台运动更加灵活。随着人类活动范围的扩展和任务需求的多样化,越障型步行机动平台越来越引起人们的重视。步行机动平台技术的水平已成为一个国家综合技术水平的标志。
1 早期越障型四足步行机动平台发展现状
世界上最早具有越障能力的四足步行机动平台是1968年出现在美国的Walking Truck。虽然它是一个有人驾驶的机器并且操作费力,但是各腿在液压驱动机构的作用下实现了对某些简单障碍爬越[1]。可见,四足步行机动平台的越障能力在其早期样机中即为一项基本功能。
日本东京工业大学的机器人研究实验室研制成功了TITAN系列四足步行机动平台[2]。TITAN-VIII机动平台是其中的典型代表,其足底装备可自动检测足端与地面接触状态的传感器,并且配有姿态控制系统以便于及时根据环境状况调解机体位姿,使其适应复杂地形的能力更强。TITAN系列的步行机动平台腿部均采用仿爬行动物的结构,每条腿均有3个自由度,驱动方式采用的是电机驱动。
这一时期的越障型四足步行机动平台还有西班牙工业自动化协会开发了SILO4四足步行机动平台[3]等。早期的越障型四足步行机动平台主要应用于实验室相关的理论研究。由于相关技术的限制,其越障性能还十分有限,并且复杂能力较差,运动速度慢。
2 高性能越障型四足步行机动平台发展现状
20世纪90年代以后,步行机动平台的应用环境转向野外未知的非结构地形。随着人们对四足哺乳动物研究的深入,较多的仿生学理论应用于越障型四足步行机动平台。步行机动平台的腿部结构多采用仿哺乳动物的串联式腿部结构,机体携带较多的传感器,控制算法更加智能。并且机动平台的更加接近自然界的四足动物。
2006年,波士顿动力公司研制出了高动态越障型四足步行机动平台—第一代“Bigdog”。其单腿有3个主动自由度,四条腿的关节均采用了膝式关节的配置方式。驱动系统为以发动机为动力源的液压驱动系统。第一代“Bigdog”实现了行走和对角小跑步态,但在复杂环境中容易失稳 [4]。2008年 第二代“Bigdog”被公布了出来,其每条腿具有4个主动自由度,腿部结构更加强调仿生学设计,关节更加粗壮,运动更加平稳。并且实现了在车辙、山地、丘陵以及浅滩的稳定行走[5]。
2011年波士顿动力公司发布了第三代“Bigdog”原理样机[6]。其单腿具有3个主动自由度,驱动方式仍然沿用了以发动机为动力源的液压驱动,关节配置方式采用了前膝后肘的方式。LS3是在满足实用功能的前提下对“Bigdog”的结构进行了简化,将有腿步行系统和负载能力较好地结合在了一起,是世界上负载型四足步行机动平台的典型代表。
2015年2月,波士顿动力公司公布了最新研制成功的Spot四足步行机动平台[7]。与“Bigdog”系列相比,其前后腿均采用的是全肘式关节配置方式,灵活性更好。动力源由发动机变成了电机,但关节仍然延续液压驱动的方式。从发布的资料可以得到它能够在台阶、山地等复杂路面稳定地行走。
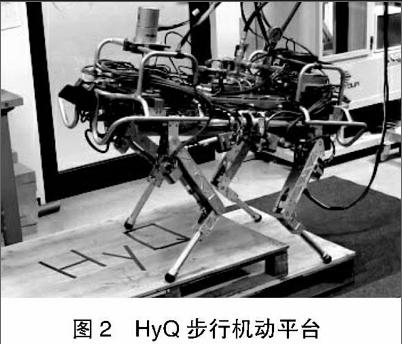
受“Bigdog”四足步行机动平台的影响,意大利理工学院研制了HyQ四足步行机动平台[8]。其驱动方式为电液混合驱动,单腿有三个主动自由度,侧摆关节采用伺服电机驱动,髋关节和膝关节采用液压驱动。HyQ四足步行机动平台目在不平坦路面中实现了稳定行走。
3 越障型四足步行机动平台的关键技术分析
(1)越障型四足步行机动平台仿生结构。机械结构是机械系统实现其各项功能的基础。四足动物腿部结构的仿生学研究是设计步行机动平台腿部结构的前提。四足动物众多长骨之间连接而成了腿部的特殊结构和冗余自由度。四足步行机动平台要实现行走,首先需要确定腿的拓扑结构配置和腿部的自由度数。
通过对“Bigdog”系列步行机动平台的对比发现,机动平台腿部的拓扑结构设计对其运动学和动力学性能有显著影响。作为“Bigdog” 系列最早期的一款,第一代“Bigdog”采用了前后腿均为膝式关节的配置方式,其各项性能均较一般。第二代“Bigdog”采用的是前肘后膝的关节对顶配置方式,同时增加了一个自由度,这使其运动非常灵活。第三代“Bigdog”LS3采用的是前膝后肘的关节配置方式,各关节粗壮有力,使其负载能力非常强,越野性能非常好。而Spot采用的则是前后腿均为肘式关节的配置方式,使其有较好的地形适应能力,并且运动学性能非常好。
通过对常见大型四足哺乳动物狗、羊、马的骨骼结构研究发现,哺乳动物单腿一般有五个自由度[9]。这些冗余自由度使动物运动非常灵活,适应复杂地形的能力很强。为减小控制系统的压力,降低步行机动平台系统的复杂程度,大多数的四足步行机动平台均采用单腿3个自由度配置,分别是髋侧摆自由度、髋前摆自由度和膝关节自由度。这种自由度配置是在复杂野外环境中自由行走所需要的最少自由度,LS3即为采用单腿三自由度的典型代表。
(2)越障型四足步行机动平台的驱动系统。类似于人类的心脏,步行机动平台的驱动系统是其实现各项功能的核心,驱动系统性能的好坏直接决定了机动平台的行走速度和负载能力。目前常见的驱动系统可分为两类发动机-液压驱动系统和电源-电机驱动系统。endprint
发动机-液压驱动系统是应用较普遍的驱动系统,其工作原理是发动机带动液压泵工作,将低压油变为高压油,通过伺服阀等流量控制元件控制液压缸的油液体积,对活塞杆实现位置控制,驱动各关节运动。发动机-液压驱动系统功率质量比大,燃料的添加较方便,续航里程长,系统响应动态响应能力好,动态特性受负载变化的影响小。但是由于液压油的可压缩性和液压回路的迟滞性,使液压驱动位置控制精度较低,稳定性也较差。
电源-电机驱动系统是目前采用较多的高精度驱动系统,其原理较简单各驱动关节电机接受来自电源的电能,直接各驱动关节电机实现相应的运动。与发动机-液压驱动系统相比,电源-电机驱动系统其运动精度高、响应速度较快,但无法满足大功率的要求,并且功率比也没有液压驱动高。
(3)越障型四足步行机动平台的行走步态。步态是机动平台行走过程中起落腿和机体移动规律的总结。机动平台的步态研究,尤其是其越障步态研究,是实现其复杂环境中稳定行走的基础。四足步行机动平台的步态多是模仿自然界常见大型哺乳动物狗、羊或者马等的步态。根据其行走过程中占空系数的不同可以将步态分为静步态和动步态[10]。四足步行机动平台常见的步态有协调静步态、间歇静步态和对角步态等。目前,对四足动物在平地行走步态的研究已较完备,相应的四足步行机动平台基本上实现了以多种步态在平地上运动。但对于四足步行机动平台的复杂环境中的步态,目前研究还不足。
4 结论
越障型四足步行机动平台是未来复杂地形环境中机动平台的发展方向之一。早期的越障型四足步行机动平台机械结构简单粗暴,导致其效率特别低,行走速度较慢。随着仿生学技术的发展和新材料的出现,机动平台机械结构问题已初步解决。机动平台有了一定的越障能力和机动性能。液压驱动的方式也满足了机动平台不同步态下的力矩需求。但如何使其能量利用率尽量高,运动学和动力学性能更好,在复杂环境中行走稳定性更好,仍然是越障型四足步行机动平台面临的问题之一。
参考文献:
[1] D.J. Todd.Walking machine:An introduction to legged robots[M].London:Chapman&Hall 1968,1985.
[2]Shigeo Hirose,Kan Yoneda,Riki Furuya,Tatsuo Takagi.Dynamic and Static Fusion Control of Quadruped Walking Vehicle[J].Workshop on Intelligent Robots and Systems,1989:199-208.
[3] J.A Galvez, Joaquin Estremera,Pablo Gonzalez de Santos. A new legged-robot configuration for research in force distribution[J],Mechatronics, 2003(13):907-932.
[4] Buehler M, Playter R,Raibert M. Robots step outside[J].Adaptive Motion of Animals and Machines,2005.
[5] M.Raibert, Blankespoor,G.Nelson. Bigdog ,the rough-terrain quadruped robot[C],Proceeding of the 17th World Congress,International Federation of Automatic Control,2008.
[6]Boston Dynamics AlphaDog Quadruped Rpbot Prototype on Video[OL].http://spectrum.ieee.org/automaton/robotics/military-robots/boston-dynamics-alphadog-prototype-on video,2013-3-5.
[7]谷歌展示最新四足机器人Spot:踢不倒的“不倒翁”[EB/OL]. http://www.sxaxrobot.com/industryNews/213.jhtml,2015-02-13.
[8] Claudio.HyQ-Design and Development of a Hydralically Actuated Quadruped Robot [D]. Italy:University of Genoa,2010:58~60.
[9] 王立鹏.液压四足机器人驱动控制与步态规划研究[D].北京理工大学,2014.
[10]陆卫丽,卞新高,焦健,朱灯林.四足爬行机器人步态分析与运动控制[J].机电工程,2012,29(8).endprint
猜你喜欢
山东工业技术(2016年24期)2017-01-12
科技传播(2016年19期)2016-12-27
科技与创新(2016年15期)2016-09-23